

Плясов Лабораторныы практикум Мекханика твердого тела 2015
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Национальный исследовательский ядерный университет «МИФИ»
Лабораторный практикум
«МЕХАНИКА ТВЕРДОГО ТЕЛА»
Под редакцией А.А. Плясова
Рекомендовано к изданию УМО "Ядерные физика и технологии"
Москва 2015
УДК 531(076.5) ББК 22.37я7 Л 12
Лабораторный практикум «Механика твердого тела»: Учебное пособие /
Под ред. А.А. Плясова. М.: НИЯУ МИФИ, 2015. – 164 с.
Авт.: А.Б. Акимов (работы 1.17, 1.17а); С.Г. Бежанов (работа 1.22а); Н.Н. Взоров (работа 1.22); Н.В. Горбачева (работа 1.22); Ф.Н. Маркун (работа 1.17б); Д.А. Морозов (работа 1.18); А.А. Плясов (введение, работы 1.16, 1.16а, 1.18, 1.20, 1.21, 1.21а); В.Д. Попов (введение, работы 1.17, 1.17а, 1.19, 1.20, 1.21, 1.23, 1.24);
А.И. Романов (работы 1.18, 1.18а, 1.18б); И.С. Ромченко (работа 1.16); В.В. Светозаров (работа 1.18); В.В. Сурков (работа 1.18а); А.Н. Тюлюсов (работа 1.19); В.В. Флоренцев (работы 1.16, 1.18); О.Ю. Цупко (работа 1.24); О.В. Щербачев
(работа 1.23).
Практикум содержит описание девяти лабораторных работ, выполняемых студентами 1-го курса в течение 1-го семестра в лабораториях «Механика» кафедры общей физики МИФИ. Основное содержание работ – изучение основных законов динамики твердого тела (на примере поступательного, вращательного и плоского движения тел), измерительных методов и точных измерительных приборов, распространенных в физических лабораториях. Описание каждой работы состоит из теоретического введения с кратким изложением основных понятий и закономерностей, подробного описания измерительных приборов и методов измерений, контрольных вопросов.
Цель практикума – привить студентам навыки исследовательской работы, научить пользоваться современными измерительными приборами и аппаратурой, ознакомить с методами измерения физических величин и методами обработки результатов измерений. Большое значение придается также возможности самостоятельного наблюдения и изучения физических явлений и закономерностей.
Пособие подготовлено в рамках Программы создания и развития НИЯУ МИФИ.
Рецензент канд. физ.-мат. наук В.Г. Байдулов
ISBN 978-5-7262-2140-3 |
© Национальный исследовательский |
|
ядерный университет «МИФИ», 2015 |
|
Редактор Е.Н. Кочубей |
Подписано в печать 20.11.2015. Формат 60х84 1/16.
Печ. л. 10,25. Уч.-изд. л. 10,25. Тираж 1700 экз.
Изд. № 1/10. Заказ № 7.
Национальный исследовательский ядерный университет «МИФИ». 115409, Москва, Каширское ш., 31.
ООО «Баркас». 115230, Москва, Каширское ш., 4.
СОДЕРЖАНИЕ |
|
Предисловие...................................................................................................... |
4 |
Лабораторная работа 1.16(1.16а). Определение ускорения свободного |
|
падения с помощью оборотного маятника................................................ |
5 |
Лабораторная работа 1.17(1.17а). Изучение динамики |
|
вращательного движения физических тел .............................................. |
18 |
Лабораторная работа 1.17б. Изучение динамики |
|
вращательного движения физических тел .............................................. |
38 |
Лабораторная работа 1.18(1.18а, 1.18б). Определение моментов |
|
инерции тел методом крутильных колебаний ...................................... |
47 |
Лабораторная работа 1.19. Определение эллипсоида инерции |
|
твердого тела методом крутильных колебаний...................................... |
73 |
Лабораторная работа 1.20. Изучение динамики поступательного |
|
движения тел с помощью машины Атвуда ............................................. |
88 |
Лабораторная работа 1.21(1.21а). Изучение динамики плоского |
|
движения физических тел ....................................................................... |
99 |
Лабораторная работа 1.22(1.22а). Изучение гироскопа......................... |
120 |
Лабораторная работа 1.23. Экспериментальное определение |
|
коэффициента трения качения с помощью наклонного маятника..... |
140 |
Лабораторная работа 1.24. Определение скорости пули с помощью |
|
баллистического маятника...................................................................... |
155 |
3
ПРЕДИСЛОВИЕ
Работы, содержащиеся в данном пособии, связаны с изучением одной из важнейших тем механики – динамики вращательного движения твер- дого тела. Эта тема является ключевой в курсе общей физики для студен- тов в первом семестре.
Лабораторные работы, вошедшие в практикум, создавались сотрудни- ками кафедры «Общей физики» НИЯУ МИФИ на протяжении всей исто- рии ее существования.
Данное издание содержит переработанное и дополненное в рамках мо- дернизации лаборатории «Механика» описание лабораторных работ по механике твердого тела, предназначенных для студентов факультетов А, КиБ, Ф, ЭТФ НИЯУ МИФИ. В издание вошли усовершенствованные опи- сания работ, ранее представленных в учебных пособиях: Лабораторный практикум «Механика твердого тела». Учебное пособие./ Под ред. В.Д. Попова. М.: МИФИ, 2008; Лабораторный практикум курса общей физики. Раздел «Механика». Учебное пособие. /Под ред. А.А. Плясова. М.: НИЯУ МИФИ, 2011.
Для подготовки к выполнению лабораторных работ настоящего прак- тикума рекомендуются следующие учебники и учебные пособия:
1.Савельев И.В. Курс общей физики. Т. 1. Механика. М: Астрель АСТ, 2003. Гл. 5 «Механика твердого тела».
2.Иродов И.Е. Основные законы механики. М.: Лаборатория Базовых Знаний, 2002. Гл. 5 «Закон сохранения момента импульса».
3.Сивухин Д.В. Общий курс физики. Т. 1. Механика. М.: Физматлит, 2006. Гл. 7 «Механика твердого тела».
4.Светозаров В.В. Элементарная обработка результатов измерений.
М.: МИФИ, 2008.
4

Лабораторная работа 1.16 (1.16а)
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ С ПОМОЩЬЮ ОБОРОТНОГО МАЯТНИКА
Цель: изучение колебательного движения тел на примере обо- ротного маятника; определение ускорения свободного падения тел.
Оборудование: оборотный маятник, фотодатчик, электронный секундомер, штангенциркуль.
ВВЕДЕНИЕ
Физическим маятником называется твердое тело, способное совершать колебания около неподвижной точки, не совпадающей с центром масс этого тела.
Если покоящийся маятник отвести в сторону и отпустить (т.е. создать начальное смещение), то он начнет совершать колебания около положения равновесия. Время, за которое маятник совершает движение из одного крайнего положения в другое и возвращается обратно в первоначальное положение, называется
периодом колебаний маятника.
При плоском движении маятника его положение в каждый мо- мент времени можно задать с помощью одной переменной – угла отклонения ϕ из положения равновесия в плоскости колебаний. Величина наибольшего угла отклонения маятника из положения равновесия, достигаемая в ходе его колебаний, называется угловой
амплитудой колебаний.
Из-за наличия силы трения в оси, вообще говоря, колебания маятника будут затухающими, т.е. с течением времени максимальное отклонение маятника от положения равновесия (амплитуда) будет уменьшаться.
Частным случаем физического маятника является математиче- ский маятник. Математическим маятником называется идеализи- рованная система, состоящая из невесомой и нерастяжимой нити,
5

на конце которой находится материальная точка массы т. Доста- точно хорошей моделью математического маятника является не- большой тяжелый шарик, подвешенный на длинной тонкой нити (длина нити l много больше радиуса шарика R: l >> R).
На рис. 1.16.1, а изображен физический маятник, подвешенный на оси z, проходящей через точку O перпендикулярно плоскости рисунка. Маятник может совершать колебания в плоскости рисун- ка, причем все точки тела, лежащие на оси z, остаются неподвиж- ными. Центр масс физического маятника обозначен точкой С. По- ложение равновесия маятника соответствует моменту, когда центр масс и точка подвеса лежат на вертикальной прямой, т.е. момент силы тяжести относительно оси z равен нулю.
На рис. 1.16.1, б представлен математический маятник.
Рис. 1.16.1
Рассмотрим малые колебания физического маятника. Если от- клонить его на угол ϕ (см. рис. 1.16.1, а), то возникает ненулевой момент силы тяжести, стремящийся вернуть его в положение рав- новесия. Проекция момента силы тяжести на ось z имеет вид
Nz = −mga sin ϕ , |
(1.16.1) |
где т – масса маятника; g – ускорение свободного падения; а – рас- стояние от точки подвеса O до центра масс маятника C, т.е. длина отрезка OC.
Так как в работе изучаются малые колебания физического маят- ника, т.е. угол отклонения мал (ϕ << 1) , то выражение для момента
силы тяжести упрощается: |
|
Nz ≈ −mga ϕ , |
(1.16.2) |
6

Колебательное движение физического маятника около непо- движной оси z описывается уравнением вращательного движения твердого тела (уравнением моментов), которое в проекции на ось z имеет вид
Izβz = N z , |
(1.16.3) |
где βz = ϕɺɺ – проекция углового ускорения маятника на ось z; Iz –
момент инерции маятника относительно оси z.
Подставляя выражение для момента силы тяжести (1.16.2) в уравнение движения (1.16.3) получим уравнение малых колебаний физического маятника:
ϕɺɺ+ mga ϕ = 0 .
I z
Решение этого дифференциального уравнения имеет вид
ϕ(t) = ϕ0 cos(ωt + α) ,
где ϕ0 – угловая амплитуда колебаний; ω = mga Iz – круговая
Iz – круговая
(циклическая) частота; α – начальная фаза.
Как следует из приведенного решения, малые колебания физи- ческого маятника являются гармоническими (функциональная за- висимость угла отклонения от времени – косинус).
Таким образом, период малых колебаний физического маятника не зависит от амплитуды колебаний и может быть определен по
формуле: |
|
T = 2π ω = 2π Iz / mga . |
(1.16.4) |
В случае математического маятника: a = l , Iz = ml2 , где l – дли-
на нити маятника. Формула (1.16.4) при этом переходит в выра- жение
T = 2π l / g . |
(1.16.5) |
Сравнивая формулы (1.16.4) и (1.16.5), можно заключить, что физический маятник массы т колеблется с тем же периодом, что и математический маятник той же массы m и длины
lпр = I z / ma , |
(1.16.6) |
Величина lпр называется приведенной длиной |
физического |
маятника. |
|
7
С использованием определения приведенной длины формулу для периода малых колебаний физического маятника (1.16.4) можно переписать в виде
|
T = 2π |
lпр / g . |
|
(1.16.7) |
|
|
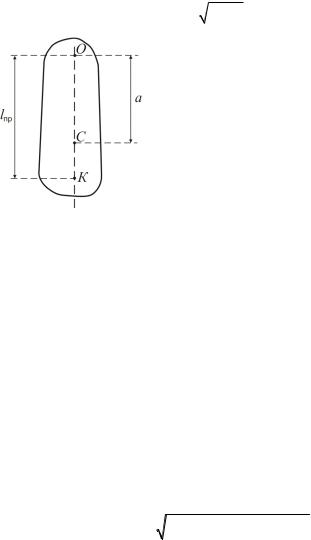
Точка K на прямой, |
соединяющей |
|||
|
точку подвеса O с центром масс тела C , |
||||
|
лежащая |
на |
расстоянии |
приведенной |
|
|
длины от оси вращения, называется цен- |
||||
|
тром |
качания |
физического маятника |
||
|
(рис. 1.16.2). Можно показать, что приве- |
||||
|
денная длина физического маятника все- |
||||
|
гда больше расстояния между точкой |
||||
|
подвеса и центром масс, |
т.е. lпр > a . |
|||
|
Следовательно, точка подвеса O и центр |
||||
Рис.1.16.2 |
качания |
K лежат по разные стороны от |
|||
центра масс C .
Точка подвеса и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подве- са становится новым центром качания. Следовательно, при перено- се точки подвеса в центр качания период колебаний маятника оста- нется прежним. Это положение называется теоремой Гюйгенса.
Таким образом, если подобрать у физического маятника такие несимметричные относительно центра масс положения двух парал- лельных осей подвеса, чтобы период колебаний относительно них был одинаков, то расстояние между этими осями будет равно при- веденной длине.
Измеряя это расстояние и период колебаний, можно используя
формулу (1.16.7) найти ускорение свободного падения |
|
g = 4π2l / T 2 . |
(1.16.8) |
пр |
|
В заключение приведем формулу для расчета погрешности ускорения свободного падения вычисленного по формуле (1.16.8):
ε |
g |
≡ |
g = ( l |
/ l )2 |
+ (2 T / T )2 |
, |
(1.16.9) |
|
|
|
g |
пр |
пр |
|
|
|
|
|
|
|
|
|
|
|
|
|
где lпр и T – абсолютные погрешности измерения приведенной длины маятника и периода его колебаний, соответственно.
8

|
ОПИСАНИЕ УСТАНОВКИ |
|
||
|
|
К работе 1.16 |
|
|
Схема оборотного маятника, использу- |
|
|||
емого в работе, представлена на рис. 1.16.3. |
|
|||
Оборотный маятник |
представляет собой |
|
||
стальной стержень 1, на котором непо- |
|
|||
движно закреплены опорные призмы 2 и |
|
|||
3, а также тяжелые чечевицы 4 и 5. Приз- |
|
|||
мы и чечевицы закрепляются приблизи- |
|
|||
тельно так, как указано на рис. 1.16.3. Ма- |
|
|||
ятник подвешивается на кронштейне 6 на |
|
|||
одну из призм. Отвес 7 и винты 8 служат |
|
|||
для установки стойки прибора 9 в строго |
|
|||
вертикальном положении. На стойке при- |
|
|||
бора 9 укреплен фотодатчик 10, который |
|
|||
подключен в электронному секундомеру. |
|
|||
Электронный секундомер (рис. 1.16.4) |
|
|||
предназначен для измерения периода ко- |
|
|||
лебаний оборотного маятника и конструк- |
|
|||
тивно выполнен единым блоком с пуско- |
Рис. 1.16.3 |
|||
вым устройством. |
|
|
||
Когда |
маятник проходит положение |
|
||
равновесия, он пересекает оптическую ось |
|
|||
фотодатчика. При этом обращенная к фо- |
|
|||
тодатчику |
сторона |
свободной опорной |
|
|
призмы (той опорной призмы, на которой |
|
|||
в это время не подвешен оборотный маят- |
Рис. 1.16.4 |
|||
ник) отражает луч |
света, испущенный |
|||
|
||||
осветителем фотодатчика на фотоэлемент фотодатчика. Генериру- емые при этом в фотодатчике электрические импульсы управляют работой электронного секундомера.
В процессе выполнения задания лабораторной работы опорные призмы 2 и 3 и чечевица 4 закреплены на оборотном маятнике неподвижно. Чечевица 5 может перемещаться по винтовой нарезке; ее положение определяется отрезком l, отсчитываемым от конца
9
стального стержня 1 маятника (см. рис.1.16.3) по шкале маятника, нанесенной на том же стальном стержне 1.
Секундомер оборудован системой самодиагностики. Если на табло после включения высвечивается ошибка 1 (Err1), то система сигнализирует об отсутствии подключенного фотодатчика. В этом случае следует проверить подключение всех разъемов. Если на табло в ходе работы высвечивается ошибка 2 (Err2), то фотодатчик не видит отраженного от призмы луча. В этом случае следует проверить правильность установки маятника, и расположить его таким образом, чтобы плоская сторона призмы была ориен- тирована параллельно плоскости фотодатчика как можно ближе к нему.
К работе 1.16а
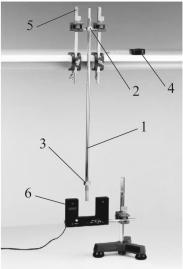
Конструкция оборотного маятника, используемого в данной ра- боте, представлена на рис. 1.16.5.
Оборотный маятник представля- ет собой стальной стержень 1, с за- крепленными на нем с помощью винтов опорными втулками 2 и 3. Маятник может быть подвешен за каждую из втулок, поэтому он называется оборотным маятником.
В начале работы опорные втулки закрепляются на расстоянии 7–10 см от концов стержня 1. Расположение опорной втулки 2 не меняется на протяжении всего эксперимента. Положение втулок и расстояние между ними определяется с помо- щью рулетки 4.
Оборотный маятник подвешива-
Рис. 1.16.5 ется за опорные втулки на двух го- ризонтальных полуосях, закреплен-
ных на кронштейнах 5, жестко соединенных с рабочим столом.
В работе изучаются малые колебания оборотного маятника. Пе- риод его колебаний определяется при помощи фотодатчика 6 с ин-
10