


7. ДИНАМИКА ТВЕРДОГО ТЕЛА
1.В механике абсолютно твёрдым телом (далее – просто твердым телом) называют систему материальных точек, расстояния между которыми всё время остаются неизменными.
2.Поступательным движением твёрдого тела называют такое его движение, при котором любая прямая, жестко связанная с телом, остаётся параллельной себе самой. Прямая, жестко связанная
стелом, – это такая прямая, расстояние от любой точки которой до любой точки тела неизменно в процессе движения.
3. Вращательным движением твёрдого
Zтела вокруг неподвижной оси называют такое
ωего движение, при котором все его точки, двигаясь в параллельных плоскостях, описывают окружности, центры которых лежат на этой оси. Положение тела задаётся углом его пово-
|
|
|
vi |
рота вокруг этой оси. |
|
O’ |
Ri |
|
4. Вектором угловой скорости |
твёрдого |
|
|
|
• |
mi |
тела называется вектор ω, направленный |
|
O |
ri |
|
вдоль оси вращения твёрдого тела в ту же |
||
|
сторону, в какую перемещается |
буравчик, |
|||
|
вращающийся вместе с телом (рис. 7.1). Про- |
|
Рис. 7.1 |
екция вектора угловой скорости на направле- |
|
ние оси вращения (ось OZ) равна производной |
||
|
||
по времени от угла поворота твёрдого тела: |
||
ωz = dϕ/dt.
Угол поворота считается положительным, если для наблюдателя, расположенного так, что ось вращения направлена к нему, поворот происходит против часовой стрелки. Соответственно, и проекция ωz положительна, если для такого наблюдателя вращение тела происходит против часовой стрелки.
5. Вектор vi скорости произвольной точки твёрдого тела, вращающегося вокруг неподвижной оси, равен векторному произведению векторов угловой скорости и радиус-вектора этой точки:
vi = [ω,ri].
90
Начало координат при этом выбрано на оси вращения твёрдого тела (см. рис. 7.1).
6.Произвольное движение твердого тела в каждый момент времени можно рассматривать как совокупность поступательного и вращательного движений (теорема Эйлера). Точку (полюс) внутри твёрдого тела, через которую проходит ось вращения, можно выбирать произвольно. При этом величина и направление вектора угловой скорости не зависят от выбора полюса, скорость же поступательного движения тела совпадает со скоростью этого полюса. Физически наиболее обусловлено и практически чаще всего наиболее удобно ось вращения выбирать так, чтобы она проходила через центр инерции тела. Тогда движение твердого тела складывается из поступательного движения со скоростью инерции масс этого тела и вращения тела относительно оси, проходящей через центр инерции.
7.Кинетическая энергия Т твердого тела, вращающегося вокруг неподвижной оси равна
T = Iω2 2 ,
где ω – величина угловой скорости вращения, а I – момент инерции твёрдого тела относительно оси вращения, определяемый равенством:
I = ∑ mi Ri2 .
i
Здесь mi – массы "точек" твёрдого тела, a Ri – их расстояния от оси вращения ОО'. Момент инерции в задачах, связанных с вращением твёрдого тела играет роль подобную той, что играет масса тела при его поступательном движении.
Под "точкой" твердого тела подразумевается физически бесконечно малый элемент объема тела с массой mi. Суммирование производится по всем таким объёмам, на которые разбито тело.
8. Если известен IС – момент инерции твёрдого тела относительно некоторой оси OO, проходящей через его центр инерции, то I – момент инерции твердого тела относительно произвольной, но параллельной ей оси O'O' находится с помощью теоремы Штейнера:
I=IС + md 2,
91

O' O
d
ци •
O' O
Рис. 7.2
где m – масса твёрдого тела, d – расстояние между осями (рис. 7.2).
m 9. В силу теоремы Эйлера для описания движения твёрдого тела необходимо знать скорость движения его центра инерции и угловую скорость вращения. Поэтому система уравнений, определяющих движение твёрдого тела, состоит из уравнения движения центра инерции и уравнения моментов:
Маци = Fвнеш, |
dL |
= Mвнеш , |
|
dt |
|
где М – масса твёрдого тела, аци – ускорение его центра инерции, Fвнеш – сумма внешних сил, приложенных к твёрдому телу, L – момент импульса твёрдого тела, Мвнеш – сумма моментов внешних сил, приложенных к нему. Заметим, что L и Мвнеш могут вычисляться как относительно центра инерции, так и относительно любой другой точки (разумеется, при этом точка, относительно кото-
рой вычисляются L и Мвнеш, должна быть одной и той же как для L, так и для Мвнеш).
10. Поскольку разложение движения твердого тела на поступательное и вращательное можно производить различными способами, то в некоторых задачах бывает удобно выбирать ось вращения таким образом, чтобы движение твердого тела представлялось как чистое вращение. Положение этой оси будет, вообще говоря, изменяться с течением времени, поэтому ее называют мгновенной осью вращения.
Z
L  ω
ω
Lz
11. Вектор момента импульса твердого тела определяется как сумма моментов "точек" этого тела:
L= Σ Li.
12. Направление вектора момента импульса твердого тела при вращении вокруг произволь-
Oной оси не совпадает, вообще говоря, с направлением этой оси (рис. 7.3). Однако в каждом твердом теле существуют три взаимно перпенди-
Рис. 7.3 |
кулярные оси, проходящие через его центр инер- |
92

ции, при вращении вокруг которых векторы L и ω совпадают по направлению. Такие оси носят название главных осей инерции. Если тело имеет ось симметрии, то она будет одной из главных осей инерции.
Задача 7.1. Докажите, что при поступательном движении твёрдого тела все его точки движутся с одинаковыми скоростями.
Решение. Выберем в теле произвольным обра- |
В |
|||
зом две точки – А и В (рис. 7.4). Обозначим их ра- |
||||
R |
||||
диус-векторы rA и rВ, а вектор, соединяющий их, |
||||
обозначим как R. Тогда: |
|
|
А |
|
rВ = rA + R. |
rB |
|||
Дифференцируя это |
равенство по времени |
rA |
||
(дифференцирование по времени обозначаем точ- |
|
|||
кой), получим: |
|
|
О |
|
i |
i |
i |
||
rB = r A + R . |
|
|||
Но вектор R – постоянный вектор, так как, ни |
Рис. 7.4 |
|
его длина, ни направление не изменяются. Действительно, расстояния между точками твёрдого тела неизменны, поэтому длина вектора R также неизменна. Кроме того, тело движется поступательно, поэтому направление вектора R также не изменяется, значит, и производная вектора R равна нулю, тем самым:
i i
rB = r A ,
т.е. скорости выбранных нами точек одинаковы. Но в силу произвольности выбора этих точек все точки тела имеют такие же скорости.
Задача 7.2. Докажите, что кинетическую энергию твёрдого тела в самом общем случае можно представить в виде:
T = |
MV 2 |
I |
ω2 |
|
||
ци |
+ |
С |
|
, |
||
2 |
2 |
|||||
|
|
|
||||
где Vци – скорость центра инерции твердого тела, IС – момент инерции твёрдого тела относительно оси вращения, проходящей через центр инерции твердого тела, ω – угловая скорость вращения твёрдого тела.
Решение. Согласно теореме Кёнига кинетическую энергию твёрдого тела можно представить как
93

|
MV 2 |
||
T = |
|
ци |
+T . |
|
|
||
|
2 |
0 |
|
|
|
|
|
Здесь M – масса тела, Vци – скорость его центра инерции, Т0 – кинетическая энергия тела в системе отсчета, движущейся со скоростью центра инерции. Но в этой системе отсчёта центр инерции неподвижен. Следовательно, движение твёрдого тела в этой системе отсчёта есть вращение вокруг оси, проходящей через центр инерции тела, и кинетическая энергия такого движения равна
= I ω2
T0 C2 ,
где IС – момент инерции тела относительно оси вращения, проходящей через центр инерции тела, а ω – угловая скорость вращения твёрдого тела.
Тем самым утверждение T = |
MV 2 |
I |
C |
ω2 |
доказано. |
|
ци |
+ |
|
|
|||
2 |
|
2 |
||||
|
|
|
|
|||
Задача 7.3. Докажите, что кинетическая энергия твёрдого тела, вращающегося вокруг неподвижной оси, связана с вектором момента импульса L этого тела и вектором угловой скорости ω его вращения по формуле
|
T |
= 1 (L,ω). |
|
|
вращ |
2 |
|
|
|
|
|
Полюс, относительно которого определяется момент импульса, |
|||
выбран на оси вращения тела. |
|
|
|
Решение. Вектор момента импульса твердого тела определяет- |
|||
ся как сумма моментов "точек" этого тела: |
|
||
L = ∑ Li = ∑[ri , mi vi ] = ∑ mi [ri , vi ] = |
|||
i |
i |
i |
|
|
= ∑ mi [ri ,[ω,ri ]]. |
|
|
|
i |
|
|
Преобразуем двойное векторное произведение под знаком сум- |
|||
мы с помощью известного тождества: |
|
||
|
[a,[b,c]] = b(a,c) – c(a,b). |
||
L = ∑ mi [ri ,[ω,ri ]] = ∑ mi {ωri |
2 −ri (ω,ri )}. |
||
i |
|
i |
|
Эта формула показывает, что направления векторов L и ω, вообще говоря, не совпадают, поскольку в самом общем случае сум-
94

ма ∑ miri (ω,ri ) представляет собой вектор, направление которого
i
не обязано совпадать с направлением вектора угловой скорости. Умножим теперь обе части полученного выражения скалярно
на вектор ω:
(ω,L) = ∑ mi ((ω,ω)ri2−ri (ω,ri )) =∑ mi{ω2ri2 −(ω,ri )2} =
i |
|
|
|
i |
|
|
||
= ∑ miω2{ri |
2 −ri |
2 cos2 αi } =∑ miω2ri |
2 sin2 αi = ω2 ∑ mi Ri2 |
=Izω2 . |
||||
i |
|
|
|
i |
|
i |
|
|
Здесь вектор Ri перпендикулярен оси вра- |
Z |
|
||||||
щения тела и направлен в точку mi (рис. 7.5), |
ω |
|
||||||
а Iz – момент инерции тела относительно оси |
|
|||||||
вращения OZ. |
|
|
|
|
|
|
|
|
Поделив обе части полученного соотноше- |
|
|
||||||
ния на 2, придём к искомому результату: |
|
vi |
||||||
|
T = 1 |
(L,ω). |
|
Ri • mi |
||||
|
вращ |
2 |
|
|
αi |
ri |
||
|
|
|
|
|
||||
Поскольку Твращ > 0, то угол между векто- |
O |
|||||||
ром момента импульса L и вектором угловой |
Рис. 7.5 |
|||||||
скорости ω может быть только острым. Полу- |
||||||||
|
|
|||||||
ченный результат можно записать несколько иначе, имея в виду,
что Tвращ = Iz2ω2 :
Iz2ω2 = 12 Lz ω.
Здесь Lz – проекция момента импульса тела на направление оси вращения OZ. Сократив обе части полученного равенства на ω/2, получим
Lz = Izω.
Как видим, момент импульса тела относительно оси вращения равен произведению момента инерции тела относительно этой оси на угловую скорость вращения вокруг этой оси.
Задача 7.4. Докажите, что кинетическая энергия твёрдого тела, вращающегося вокруг неподвижной оси, связана с проекциями
95

вектора угловой скорости ω на главные оси твёрдого тела и с моментами инерции относительно главных осей по формуле
T = 12 (Ixω2x + Iyω2y + Izω2z ).
Решение. Согласно результату предыдущей задачи, кинетическая энергия вращающегося твёрдого тела связана с его моментом импульса:
T = 12 (L,ω).
Если выбрать какие-либо оси координат, связанные с этим телом, то тогда:
T = 12 (Lxωx + Ly ωy + Lz ωz ).
Вообще говоря, каждая проекция момента импульса зависит от всех трёх проекций угловой скорости на оси координат. Однако если в качестве системы координат выбрать систему, оси которой являются главными осями тела, то, согласно свойствам этих осей:
Lx = Ixωx , Ly = Iyωy , Lz = Izωz .
Тем самым:
T = 12 (Ix ω2x + I y ω2y + Iz ω2z ).
Задача 7.5. Как зависит скорость изменения кинетической энергии твёрдого тела, т.е. производная dT/dt, от сил, приложенных к этому телу?
Решение. Согласно теореме Кёнига и результату предыдущей задачи, кинетическая энергия твёрдого тела может быть записана в виде:
|
MVци2 |
|
1 |
2 |
2 |
2 |
|
T = |
|
+ |
|
(Ixωx |
+ I yωy |
+ Izωz ). |
|
2 |
2 |
||||||
|
|
|
|
|
Здесь Ix, Iy, Iz – моменты инерции твёрдого тела относительно главных осей, а ωx, ωy, ωz – проекции вектора угловой скорости на эти оси.
Продифференцировав это равенство по времени, получим:
96

dT |
= M |
|
V , |
dV |
|
|
+(I |
|
d |
ω |
|
|
|
|
+ I |
|
dωy |
|
|
+ I |
|
dω |
z |
|
|
||||
|
|
ци |
|
|
x |
|
|
|
x |
|
ω |
x |
y |
|
ω |
y |
z |
|
ω |
) = |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
dt |
|
ци |
dt |
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
dt |
|
z |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
dVци |
|
|
dL |
|
|
|
= (Fвнеш, Vци )+(Mвнеш,ω). |
|
||||||||||||||||||
|
= M |
|
|
|
, Vци + |
|
|
|
,ω |
|
|||||||||||||||||||
|
|
|
dt |
dt |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Здесь мы учли, что |
dVци |
|
|
|
|
|
|
|
|
|
dL |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
M |
=F |
|
|
, |
|
|
=M . |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
внеш |
|
|
|
dt |
|
внеш |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь Fвнеш и Мвнеш – соответственно векторная сумма внешних сил и векторная сумма моментов внешних сил, приложенных к телу.
Как видим, изменение кинетической энергии твёрдого тела определяется как внешними силами, так и моментами этих сил. Причём, что интересно, ответ не зависит от того, в каких именно точках тела приложены действующие на тело силы. Всё определяется векторной суммой внешних сил, скоростью движения центра инерции тела и, соответственно, векторной суммой моментов внешних сил, приложенных к телу и угловой скоростью вращения тела:
dTdt = (Fвнеш, Vци )+(Mвнеш,ω).
Поскольку производная dT/dt равна мощности сил, действующих на тело, то полученный результат представляет мощность P внешних сил, приложенных к твёрдому телу:
Pвнеш = (Fвнеш, Vци )+(Mвнеш,ω).
Задача 7.6. Рассмотрим плос- |
Z |
|
|
кое твёрдое тело (такое тело пред- |
|
||
|
|
||
ставляет собой тонкую пластинку). |
|
|
|
Выберем систему координат, две |
O |
yi |
|
оси которой, скажем OX и OY, ле- |
|||
Y |
|||
жат в плоскости тела, а третья ось |
Ri |
||
xi |
xi |
||
OZ перпендикулярна его плоскости |
yi |
mi |
|
|
|||
(рис. 7.6). Пусть моменты инерции |
X |
|
|
этого тела относительно осей OX и |
|
||
|
|
||
OY равны, соответственно, Ix и Iy. |
Рис. 7.6 |
||
Докажите, что Iz =Ix + Iy. |
|
|
|
97

Решение. Запишем выражения для моментов инерции:
Ix = ΣΔmiyi2, Iy = ΣΔmixi2, Iz = ΣΔmiRi2.
Поскольку Ri2 = xi2 + yi2 , то:
Iz = ∑ mi Ri2 =∑ mi (xi2 + yi2 ) =I y + Ix .
i i
Задача 7.7. Пользуясь результатами предыдущей задачи найти момент инерции диска относительно его диаметра и момент инерции квадратной пластинки относительно её диагонали.
Решение.
1. Момент инерции диска относительно оси, проходящей через его центр перпендикулярно плоскости диска, равен, как известно,
|
|
Iдиска |
= 1 mR2 , |
|
|||
|
|
|
2 |
|
|
|
|
где m и R – соответственно его масса и радиус. |
|
||||||
С другой стороны, согласно результату предыдущей задачи |
|||||||
этот момент вдвое больше момента Iдиам относительно диаметра |
|||||||
этого диска, откуда получаем |
Iдиска = 2Iдиам = 1 mR2 |
|
|||||
Z |
|
|
, |
||||
|
l |
|
2 |
|
|
||
|
|
Iдиам = 1 mR2 . |
|
||||
|
|
|
|
||||
О |
|
Y |
4 |
|
|
|
|
|
|
2. Для квадратной пластинки запи- |
|||||
X’ |
Y’ |
шем (оси изображены на рис. 7.7): |
|||||
IZ |
= I X + IY = 2Ix = 2 |
1 |
ml2 |
= 1 ml2 . |
|||
X |
|
||||||
|
|
||||||
Рис. 7.7 |
|
|
12 |
|
6 |
||
Поскольку диагонали квадрата также перпендикулярны друг другу, то
IZ = 2IX' = 16 ml2 .
Тем самым, момент инерции квадрата относительно его диагонали совпадает с моментом инерции относительно оси, проходя-
щей через середины его противоположных сторон: IX' = 121 ml2 .
98
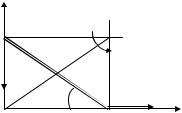
Задача 7.8. Стержень массы m движется так, что его концы скользят по двум сторонам прямого угла. Найти кинетическую энергию стержня в тот момент, когда он образует угол α с одной из сторон угла, а его конец, движущийся по этой стороне, имеет скорость V.
Решение. Проще всего решить задачу, если воспользоваться понятием мгновенной оси вращения. В данном случае эту ось легко отыскать. Поскольку направления скоростей концов стержня известны, то, проводя через эти концы перпендикуляры к векторам скоростей, найдём точку их пересечения О' (рис. 7.8). Через эту точку и проходит мгновенная ось вращения, поскольку при вращении твёрдого тела вектор скорости любой его точки направлен перпендикулярно радиусу окружности, по которой эта точка движется. Угловая скорость ω вращения стержня связана со скоростью
V его конца А соотношением |
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
||||||||||
V = ω O’A = ω l sinα, |
|
|
|
|
|
|
|
|
|
|
|
|
|
О' |
|
|||||||||||
откуда находим угловую скорость |
B |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ω= |
|
V |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
ω |
|
|
l sin α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Кинетическая энергия Т стержня: |
|
О |
|
|
|
|
|
|
α |
V |
X |
|||||||||||||||
|
|
Iω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
T = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|||||
2 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.8 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где его момент инерции I относи- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
тельно мгновенной оси вращения найдём по теореме Штейнера: |
|
|||||||||||||||||||||||||
|
|
ml2 |
|
|
|
|
|
|
|
2 |
|
|
ml2 |
|
|
|
l |
2 |
|
ml |
2 |
|
|
|||
I = |
|
|
+ m(CO ') |
|
= |
|
+ m |
|
|
= |
|
|
. |
|
|
|||||||||||
12 |
|
12 |
2 |
3 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Окончательно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T = |
Iω2 |
|
1 ml |
2 V |
|
|
2 |
|
|
mV 2 |
|
|
|
|
||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
. |
|
|
|
|||
|
2 |
|
2 3 |
|
|
|
α |
|
6sin |
2 |
α |
|
|
|
||||||||||||
|
|
|
|
|
|
|
l sin |
|
|
|
|
|
|
|
||||||||||||
Задача 7.9. На однородный сплошной цилиндр радиуса R и массы М намотана невесомая нерастяжимая нить, к концу которой подвешен груз массы m. В момент t = 0 система пришла в движение. Определить ускорение, с которым опускается груз и силу натяжения нити. Трением в оси вращения цилиндра пренебречь.
99

Решение. Изобразим силы, действующие на тела системы (рис.
7.9). На груз действуют две силы: тяжести и сила натяжения нити |
|||||||||
|
//////////////// |
|
|
Т. Из сил, действующих на цилиндр, рассмотрим |
|||||
|
|
|
лишь силу натяжения нити, которая вызывает |
||||||
|
|
|
|
|
|
|
|||
|
|
R |
|
|
|
вращение. Уравнение движения груза в проекции |
|||
|
|
T |
на ось ОХ имеет вид: |
||||||
|
|
|
|
|
|
|
ma = mg – T, |
||
|
|
|
|
T |
а уравнение движения цилиндра в проекции на |
||||
|
|
|
|
ось цилиндра (уравнение моментов относительно |
|||||
|
|
|
|
|
|
a |
оси цилиндра) имеет вид: |
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
dω |
|
|
X |
mg |
|
||||||
|
I |
|
=TR , |
||||||
|
Рис. 7.9 |
dt |
|||||||
|
где I – момент инерции цилиндра относительно |
||||||||
|
|
|
|
|
|
|
|||
его оси, T R – момент силы Т относительно оси цилиндра. Система уравнений содержит три неизвестных величины: a, ω и Т, поэтому необходимо еще одно уравнение. В качестве него можно использовать уравнение, связывающее скорость груза и линейную скорость точек поверхности цилиндра. Эти скорости равны, так как нить нерастяжима и не скользит по поверхности цилиндра. Итак,
ωR = υ.
Дифференцируя это равенство по времени, получим:
R ddtω = ddtυ = a .
Заменив во втором уравнении системы dω/dt на a/R и учтя, что момент инерции однородного цилиндра относительно его оси равен MR2/2, получим
a = g |
|
m |
|
|
|
= g |
|
m |
, |
|
||||
m + |
I |
|
|
|
m + M |
|||||||||
|
|
|
|
|
|
|
|
|
||||||
R2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
I |
|
|
|
|
|
|
|
mM |
|
|
T = mg |
|
|
R2 |
|
|
|
= g |
. |
||||||
|
|
|
I |
|
|
|
||||||||
|
|
m + |
|
|
|
|
|
2m + M |
||||||
|
|
R2 |
|
|
|
|
|
|||||||
Задача 7.10. На наклонной плоскости, образующей угол α с горизонтом находится шар радиуса R. Центр шара находится на вы-
100
соте h. С какой скоростью будет двигаться шар (его центр масс) после того, как он скатится с плоскости, если движение происходит без проскальзывания? Горка плавно переходит в горизонтальную плоскость, так что при скатывании шара удара о горизонтальную плоскость не происходит.
Решение. Применим закон сохранения энергии. В начальный момент шар покоился, и его энергия определялась лишь его потенциальной энергией U = mgh. После того, как шар скатился, его энергия определяется не только потенциальной энергией mgR, но и кинетической энергией. Последняя, в свою очередь, складывается
согласно теореме Кенига из величины mVци2 /2 и Iω2/2, где Vци – ско-
рость центра инерции шара, ω – угловая скорость вращения шара, I
– момент инерции шара относительно его диаметра. В силу закона сохранения энергии получаем:
|
|
mgh = mgR + |
mVци2 |
+ |
Iω2 |
. |
(1) |
||
|
|
2 |
|
2 |
|||||
|
|
|
|
|
|
|
|
||
R |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
Fтр |
V |
|
|
|
|
|
2 |
|
h |
А |
|
|
|
|
|
|
||
|
mg |
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Рис. 7.10 |
|
|
|
|
|
||
Для нахождения ω рассмотрим точку А, в которой шар соприкасается с плоскостью. Так как проскальзывания нет, то скорость этой точки равна нулю. С другой стороны, проекцию скорости этой точки на плоскость можно представить как сумму скорости центра инерции шара Vци и скорости ωR, которой обладает точка в своем вращении вместе с шаром. Эта скорость направлена навстречу движению центра инерции шара.
Таким образом, 0 = Vци – ωR, откуда ω = VRци .
101

Из (1) находим Vци:
Vци = |
2g(h − R) |
m |
. |
||
m + |
I |
||||
|
|
|
|||
|
|
R2 |
|
||
|
|
|
|
||
Учитывая, что момент инерции шара I = 2mR2/5, получаем окончательно:
V = 2g(h − R) |
m |
|
= 2g(h − R) |
|
m |
= |
10 g(h − R). |
|
|
I |
|
|
|
||||
ци |
m + |
|
|
m + |
2mR2 |
|
7 |
|
|
2 |
|
||||||
|
|
R |
|
|
|
5R2 |
|
|
Как и следовало ожидать, скорость скатившегося шара оказалась меньше, чем скорость тела, свободно упавшего с такой же высоты, так как часть потенциальной энергии ушла на раскручивание шара.
Всё довольно просто, но остаётся вопрос: а на каком основании мы пользовались законом сохранения энергии, коль скоро здесь присутствует сила трения? Действительно, наличие силы трения обычно приводит к потере энергии, здесь же мы этим полностью пренебрегли. На каком основании? Ответ, который обычно можно услышать, состоит в том, что поскольку нет скольжения, то сила трения покоя работы не совершает. Не знаю, как вас, а меня это объяснение ни в чём не убеждает. Поэтому давайте разбираться основательнее.
Согласно результату задачи 7.5 мощность внешних сил, приложенных к телу:
Ti = dAdt FвнешVци + Мвнешω,
откуда элементарная работа этих сил
i
dA = T dt = FвнешVциdt + Мвнешωdt.
Итак, работа, которую совершают над телом внешние силы, со-
стоит из двух частей, первая из которых FвнешVциdt есть работа, которую совершают внешние силы на перемещении центра инерции тела
dsци = Vциdt при поступательном движении тела, а вторая Mвнешωdt – работа моментов внешних сил при повороте тела на угол dϕ = ωdt. Как видим, работа, совершаемая над твёрдым телом, определяется
102
перемещением тела как в его поступательном, так и вращательном движении.
На тело в данной задаче действуют три силы: тяжести, трения и нормальная компонента реакции опоры. Нормальная компонента силы реакции опоры направлена перпендикулярно перемещению центра масс шара, и, кроме того, её момент относительно центра масс шара равен нулю. Поэтому её работа равна нулю.
Работа силы тяжести равна убыли потенциальной энергии тела: dAтяж = – dU.
Работа силы трения dAтр =(–FтрdVци + Fтр Rω)dt.
Как было установлено, Rω = Vци, поэтому работа силы трения:
dAтр =(–FтрVци + Fтр Vци)dt = 0.
Итак, работа силы трения действительно равна нулю. Но это, можно сказать, не совсем простой нуль. Работа силы трения состоит из двух равных по величине и противоположных по знаку частей. Первая, отрицательная часть работы, приводит к уменьшению скорости (точнее говоря, кинетической энергии) поступательного движения. Вторая, положительная часть, увеличивает кинетическую энергию вращательного движения. Но, в конце концов, работа силы трения оказывается нулевой, поэтому энергия тела сохраняется. Так что решение верное.
В заключение докажем, что потенциальная энергия тела в однородном поле тяжести равна
U = mghци,
где hци – высота, на которой находится центр инерции тела, то есть
– подчеркнем это – определяется только положением центра инерции тела и никак не зависит от его ориентации. При повороте тела в однородном поле тяжести вокруг его центра инерции потенциальная энергия тела в этом поле не меняется.
Для доказательства учтём, что твёрдое тело можно представлять как систему материальных "точек", поэтому его потенциальная энергия равна сумме потенциальных энергий этих "точек":
U = ∑ mi ghi = ∑ mi |
∑ mihi |
||
i |
g = mghци. |
||
|
|||
i |
i |
∑ mi |
|
i
Здесь m – масса тела.
103

Задача 7.11. На гладкой горизонтальной плоскости находится стержень длины l и массы m. Первоначально он стоял вертикально, а затем начал падать. Считая, что стержень начал падать из состояния покоя, определить траекторию, по которой будет двигаться центр инерции стержня, а также скорость его центра инерции в момент удара стержня о плоскость.
Решение. На стержень действуют две силы: сила тяжести mg и сила реакции плоскости N (рис. 7.11). Уравнение движения центра инерции стержня имеет вид
таци = mg + N.
Так как силы mg и N направлены вертикально, то и вектор аци также направлен вертикально вниз. Поскольку начальная скорость стержня равна нулю, то скорость центра инерции также имеет вертикальное направление. Отсюда следует, что центр инерции стержня движется вертикально вниз. Для нахождения скорости центра инерции в момент удара воспользуемся законом сохранения энергии. В начальный момент стержень покоился, поэтому его энергия была равна потенциальной энергии:
Е1 = mghци,
где hци = l/2 – высота, на которой первоначально находился центр инерции стержня. В момент удара о плоскость потенциальная энергия равна нулю и энергия стержня равна его кинетической энергии:
E2 = Iω2/2,
где I – момент инерции стержня относительно мгновенной оси вращения.
В случае падающего стержня мы знаем направления движения центра инерции и конца стержня, скользящего по плоскости. Центр инерции, как мы установили, движется вертикально вниз, а конец стержня (точка
А на рис. 7.11) – вдоль плоскости, т.е. его
Оскорость VA направлена горизонтально.
|
N |
|
Положение мгновенной оси |
вращения |
|
Vци mg |
изображено на рисунке: она проходит че- |
||
|
|
рез точку О перпендикулярно плоскости |
||
VА |
|
|||
|
чертежа. Нетрудно понять, что в момент |
|||
|
|
Рис. 7.11 |
||
|
|
удара стержня о плоскость, |
мгновенная |
|
|
|
|
||
104

ось вращения будет проходить через нижний конец стержня (точку А). Поэтому момент инерции стержня в этот момент времени согласно теореме Штейнера равен
|
1 |
|
|
2 |
|
|
|
|
l |
2 |
|
|
ml |
2 |
|
||||||
I = |
|
|
|
ml |
|
|
|
+ m |
|
|
|
= |
|
|
. |
||||||
12 |
|
|
|
|
3 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||
Таким образом, согласно закону сохранения энергии получаем |
|||||||||||||||||||||
|
|
|
mgl |
|
|
1 ml2 |
|
|
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
ω |
. |
|
|
|
||
Откуда |
|
|
|
2 |
|
|
2 |
3 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω= |
|
|
|
3g |
. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
||
Скорость центра инерции в этот момент равна ωl/2, т.е. |
|||||||||||||||||||||
|
|
|
|
V |
|
|
|
= |
|
|
3gl . |
|
|
|
|
|
|||||
|
|
|
|
ци |
|
|
4 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Задача 7.12. Стержень массы m и длины l лежит своими концами на двух опорах (рис. 7.12). В некоторый момент одну из опор выбивают. Найти в этот момент силу реакции второй опоры.
Решение. Сразу после удаления опоры на стержень действуют две силы: тяжести – mg и реакции второй опоры – N. Под действием этих сил стержень начинает вращаться вокруг точки касания с
оставшейся опорой. Выпишем сис- |
|
N |
l, m |
||||||||||
тему уравнений динамики, описы- |
|
||||||||||||
|
|
|
|
||||||||||
вающих движение стержня: |
|
|
|
|
|||||||||
|
dV |
|
|
|
|
|
|
||||||
|
|
|
///////////// |
||||||||||
m |
|
= mg − N, |
|
///////////// |
|||||||||
dt |
|
|
|
mg |
|||||||||
|
|
|
|
|
|
|
|
|
|||||
|
ml2 dω |
= mg |
l |
|
|
Рис. 7.12 |
|||||||
|
|
|
|
|
|
. |
|
|
|
|
|||
3 |
|
|
dt |
2 |
|
|
|
|
|||||
Первое из уравнений представляет собой уравнение второго закона Ньютона для центра инерции стержня в проекции на вертикальное направление (направление силы тяжести). Второе – уравнение моментов относительно оси вращения стержня, которая проходит перпендикулярно плоскости чертежа через точку соприкосновения стержня с опорой. Сила реакции N направлена вертикаль-
105

но, поскольку в начальный момент стержень ещё не изменил своего горизонтального положения.
Во втором уравнении ml2/3 – момент инерции стержня относительно оси вращения, mg(l/2) – момент силы тяжести относительно оси вращения, V – скорость центра инерции стержня. Кроме того
следует учесть, что V = ω2l , так как движением стержня является
вращение вокруг точки касания с опорой. Дифференцируя это равенство по времени, получим
dVdt = 2l ddtω .
Таким образом, составляем следующую систему уравнений:
ml dω = mg − N, 2 dt
ml |
2 |
|
dω |
= mg |
l |
. |
3 |
|
|
dt |
2 |
||
|
|
|
|
Откуда находим N = mg4 .
Ответ довольно неожиданный. На первый взгляд, кажется, что N должна быть не меньше, чем mg/2, так как до удаления опоры на каждую из них приходилось по mg/2, а после удаления стержень давит лишь на одну опору. Попытайтесь самостоятельно объяснить этот "парадокс".
Задача 7.13. Шар массы m и радиуса R раскрутили вокруг его горизонтальной оси до угловой скорости ω0 и опустили на горизонтальную плоскость. С какой скоростью покатится шар, после того, как проскальзывание прекратится?
Решение. Задача допускает различные способы решения. Рассмотрим два из них.
Способ 1. В процессе движения на шар действуют три силы (рис. 7.13): тяжести тg, нормальная компонента силы реакции плоскости N и сила трения Fтр. Нетрудно понять, что пока шар катится с проскальзыванием, сила трения направлена вперед (поясните это утверждение самостоятельно).
106

|
ω0 |
ω |
|
|
V |
m |
R |
Fтр |
V '< 0 |
|
|
/////////////////////////////////////////////////////////// |
Рис. 7.13 |
V '=0 |
|
Составим систему уравнений, описывающих движение шара:
m |
dV |
= F |
|
, |
0 = N −mg, |
||
|
|
|
|||||
|
|
dt |
тр |
|
|
||
|
|
|
|
|
|
||
I |
dω |
= −F R, |
F = kN. |
||||
|
|||||||
|
|
dt |
|
тр |
тр |
||
|
|
|
|
|
|
||
Первые два уравнения – проекции уравнения движения центра инерции шара на горизонтальное и вертикальное направления, третье – уравнение моментов, причём моменты вычисляются относительно оси вращения шара. Знак минус в правой части этого уравнения отражает то обстоятельство, что сила трения замедляет вращение шара. Но так как сила трения одновременно и ускоряет центр инерции шара, то в первом уравнении она стоит со знаком плюс. Последнее уравнение справедливо лишь до тех пор, пока шар движется с проскальзыванием, т.е. пока Fтр – сила трения
скольжения. Исключая из |
этих уравнений силу N, находим |
||||
Fтр = kmg, и с учетом этого получаем уравнения для V и ω: |
|||||
m |
dV |
= kmg, |
I |
dω |
= −kmgR. |
|
|
||||
|
dt |
|
dt |
||
Откуда после интегрирования по времени при заданных начальных условиях получаем
V = kgt, ω= ω0 − kmgRI t.
Зная V и ω, найдем V ' – скорость точки соприкосновения шара с плоскостью:
V' =V −ωR = 1+ mR2 kgt −ω0 R.
I
107
Как видим, V ' < 0 при достаточно малых t, что соответствует движению шара с проскальзыванием. Проскальзывание прекращается в тот момент, когда V ' = 0, откуда и находим соответствующее значение t:
t = |
ω0 R |
|
, |
|
|
+ mR |
2 |
||
|
kg 1 |
|
||
|
|
I |
|
|
а затем скорость центра инерции шара и его угловую скорость в этот момент:
V = |
|
ω0 R |
|
|
|
ω= ω0 |
I |
|||||
|
|
|
, |
|
|
|
|
. |
||||
1+ |
mR2 |
I + mR2 |
||||||||||
|
I |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
Для однородного шара: |
|
|
|
|
|
|
|
|
||||
|
|
|
I = |
2 |
|
mR2 , |
||||||
|
|
|
5 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
V = |
|
2 |
ω R, |
||||||
|
|
|
7 |
|||||||||
|
|
|
|
|
|
0 |
|
|
||||
|
|
|
ω= |
2 |
ω . |
|||||||
|
|
|
|
|||||||||
|
|
|
|
|
7 |
0 |
|
|
||||
Интересно, что конечные скорости совершенно не зависят от величины коэффициента трения.
Способ 2. Этот метод основан на применении теоремы Кенига для момента импульса системы точек:
L = [Rци,P] + L0,
где L0 – момент импульса системы точек относительно ее центра масс, Rци – радиус-вектор центра инерции системы, Р – импульс системы. В нашем случае система точек – это шар, который вращается (в системе отсчета, в которой центр шара покоится) вокруг своего диаметра, т.е. вокруг главной оси инерции, поэтому L0 = Iω, где I – момент инерции шара относительно его диаметра.
Рассмотрим момент импульса шара относительно точки касания шара с плоскостью в начальный момент времени (рис. 7.14). Нетрудно видеть, что сумма моментов сил, действующих на шар, относительно этой точки равна нулю. Действительно, сила тяжести
108

и сила реакции опоры направлены вдоль одной прямой и их сумма равна нулю, поэтому и сумма моментов этих сил равна нулю.
ω0 |
|
ω |
|
|
|
|
N m |
V |
|
Rци |
|
R |
||
α r |
Fтр |
|||
|
||||
|
|
|
|
/////////////////////////////////////////////////////////// |
|
|
|
|
О |
mg |
|
Рис. 7.14 |
|
|
||
|
|
|
|
|
Сила трения коллинеарна радиус-вектору r её точки приложения, поэтому её момент также равен нулю. Таким образом, в силу уравнения моментов, момент импульса шара относительно точки О остаётся постоянным. Но в начальный момент времени импульс шара равен нулю, поэтому величина момента была равна L = Iω0. В последующие моменты времени его величина находится с помощью теоремы Кёнига для момента импульса системы точек:
L = [Rци,P] + L0,
L = RциmVsinα + Iω = RmV + Iω.
Итак,
Iω0= RmV + Iω.
После того, как скольжение прекратится, скорость точки касания шара с плоскостью станет равной нулю:
V – ωR = 0,
откуда ω= |
V |
и |
|
|
|
|
|
|
|
R |
|
ω0 R |
|
|
I |
||||
|
|
|
|
|
|||||
|
|
V = |
|
|
ω= ω0 |
||||
|
|
|
|
|
, |
|
. |
||
|
|
1+ |
mR2 |
I + mR2 |
|||||
|
|
|
I |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Задача 7.14. По бильярдному шару кием нанесли удар в горизонтальном направлении так, что вертикальная плоскость, в которой расположена линия удара, проходила через центр шара. На какой высоте h над центром шара нанесён удар, если после удара шар покатился без проскальзывания?
Решение. Движение шара в процессе удара определяется уравнениями:
109

|
|
F |
m |
dV |
= F, |
|||
|
|
|||||||
h |
dt |
|||||||
|
|
|
|
|||||
|
|
R |
I |
dω |
= Fh, |
|||
|
|
|||||||
|
|
|
dt |
|
||||
////////////////////////////////////// |
|
|||||||
|
|
Рис. 7.15 |
где h – высота удара над центром ша- |
|||||
|
|
|
ра, F – сила, действовавшая на шар в |
|||||
процессе удара со стороны кия (рис. 7.15). Сила F велика по сравнению с силой трения между шаром и столом, поэтому силу трения можно не учитывать.
Пусть удар длился время τ. Проинтегрируем эти уравнения по времени от нуля до τ:
mV = ∫0τ Fdt,
Iω= h∫0τ Fdt.
Здесь V – скорость центра шара после удара, ω – его угловая скорость после удара. Из этих уравнений получаем соотношение между V и ω:
ω= hmVI .
Скорость точки касания шара со столом равна:
V' =V −ωR =V 1 − hmR .
I
Если шар после удара не скользит по столу, то V ' = 0, откуда находим h:
h = mRI = 52 R.
Задача 7.15. Как известно, автомобиль приводится в движение мотором. Но мотор – часть автомобиля, следовательно, какие бы силы или моменты сил, ни создавал мотор, это будут внутренние силы. Поэтому они не могут вызвать движения автомобиля. Для приведения автомобиля в движение нужна внешняя сила.
1. Что это за сила, если автомобиль движется сам, его никто не буксирует и не толкает? Назовём эту внешнюю силу силой тяги.
110
Чему равна сила тяги, если радиус колёс автомобиля R, а момент сил, развиваемый мотором автомобиля, равен М? Массу колёс примем равной нулю.
2.Полагая, что сила тяги приложена к ведущим колёсам, а сила трения, действующая на ведомые колёса, пренебрежимо мала, найдите силы давления передних и задних колёс на землю. Примем, что расстояние между осями колёс L, высота центра масс относительно земли h, центр масс расположен посередине между осями, масса автомобиля m, сила тяги равна F.
3.На какие колёса приседает автомобиль при разгоне? Зависит ли ответ задачи от того, какие колёса ведущие – передние или задние?
4.Рассмотрим движение игрушечного автомобильчика с пружинным мотором. Пусть пружина в заведённом состоянии обладает потенциальной энергией U. Какую кинетическую энергию приобретёт автомобильчик после того, как пружина полностью раскрутится? Как зависит изменение кинетической энергии автомобильчика от выбора системы отсчёта, в которой рассматривается движение автомобиля? Потерями на трение в механизме пренебречь.
Решение.
1.Ответ очевиден. В отсутствие силы трения между колёсами
идорогой автомобиль самостоятельно двигаться не сможет. Следовательно, двигаться автомобиль заставляет сила трения между ведущими колёсами и дорогой. В условиях безопасного вождения автомобиля колёса не должны скользить по дороге, так что это сила трения покоя. Обстоятельство это важное, так как величина этой силы может быть любой: от нуля до максимального значения, определяемого весом автомобиля и коэффициентом трения колёс о дорогу. Так как колесо по условию задачи невесомо, то сумма моментов, действующих на колесо, равна нулю. Иначе ускорение колеса было бы бесконечно большим.
На ведущие колеса действуют момент сил М со стороны мотора (точнее, трансмиссии, но это не принципиально), и момент силы трения, или в нашей терминологии, силы тяги F (рис. 7.16). Эти
111

|
|
M |
моменты вращают колесо в противоположные |
|
|
стороны, т.е. их моменты имеют противопо- |
|
|
R |
F |
ложные знаки: |
|
М – F R = 0. |
||
|
|
||
|
|
Откуда |
|
//////////////////////////// |
|||
|
Рис. 7.16 |
F = M/R. |
|
|
|
|
Как видим, сила тяги, т.е. сила трения по- |
коя, может изменяться в зависимости от величины вращающего момента.
Подумайте, что изменится, если сделать момент сил М настолько большим, что колёса начнут скользить?
2. Сумма проекций на вертикальное направление сил (рис. 7.17), действующих на автомобиль, равна нулю:
N1+ N2 – mg = 0.
Кроме того, относительно центра масс автомобиля сумма моментов сил, приложенных к автомобилю, также равна нулю:
F h+ (N1– N2) L/2 = 0.
Решая эту систему уравнений, найдём искомые силы:
N1 |
= |
mg |
+ |
Fh |
, |
N2 |
= |
mg |
− |
|
Fh |
. |
|
L |
|
|
|||||||||
|
2 |
|
|
|
2 |
|
|
L |
||||
N1 |
|
|
|
|
|
|
|
|
|
N2 |
||
h |
F |
|
|
|
L |
mg
Рис. 7.17
3. Как видим, давление на задние колёса всегда выше, чем на передние. Т.е. автомобиль при разгоне всегда приседает на задние колёса. Исходные уравнения, а значит, и ответ, не зависят от того,
112

куда приложена сила тяги F, к передним или задним колёсам. При торможении сила тяги меняет направление (становится силой торможения), т.е. знак F изменяется на противоположный. Следовательно, N1 уменьшается, а N2 возрастает. Это означает, что при торможении автомобиль сильнее давит на передние колёса, т.е. его нос опускается.
4. Изменение кинетической энергии автомобильчика равно работе внешних сил (см. задачу 7.6):
dA = FвнешVциdt + МвнешΩdt.
Поскольку колёса невесомы, а автомобиль движется поступательно (Ω = 0), то второе слагаемое равно нулю. Но, как мы видели выше, F = M/R, откуда
dA = MR Vциdt = M VRци dt = M ωdt = Mdϕ,
где М – момент сил, развиваемый пружиной, ω – угловая скорость вращения колёс, dϕ – угол поворота колёс за время dt. Мы предполагаем, что колёса не скользят, поэтому ω = Vци/R. С другой стороны, записанная таким образом работа силы тяги равна работе пружины. Но эта работа равна убыли потенциальной энергии пружины:
dA = – dU.
Таким образом, получаем:
mV2 2 = A =U1 −U2 =U −0 =U.
Как видим, кинетическая энергия равна первоначальной потенциальной энергии пружины.
Если рассмотреть этот же процесс с точки зрения движущегося наблюдателя (ср. с задачей 6.5), то надо учесть правило сложения скоростей, что даёт в этом случае
Vци = ωR +Vнабл.
Здесь Vци – скорость автомобильчика относительно наблюдателя, ωR – скорость автомобильчика относительно земли, Vнабл – скорость движения наблюдателя относительно земли. Поэтому
dA = FVциdt = F (ωR +Vнабл )dt = FRωdt + FVнаблdt =
= Mdϕ + FVнаблdt.
113

Вновь учтём, что Mdϕ = – dU, и тогда
dA = Mdϕ + FVнаблdt = −dU + FdSнабл.
Здесь dsнабл = Vнаблdt.
Окончательно находим: mV 2
2
Здесь sнабл – перемещение наблюдателя за время раскручивания пружины. Как видим, к работе пружины добавляется ещё величина
Fsнабл.
Задача 7.16. (Задача предложена В.И. Гервидсом). Брусок, находящийся на горизонтальной шероховатой плоскости, толкнули, сообщив ему поступательное движение с некоторой скоростью. Пусть масса бруска т, высота бруска h, коэффициент трения k. Изза трения скорость бруска будет убывать до нуля. Тем самым, обратятся в нуль импульс, кинетическая энергия бруска и его момент импульса. Уменьшение импульса и кинетической энергии бруска вызваны, очевидно, силой трения. А чем вызвано уменьшение момента импульса бруска? Действительно, выберем в качестве полюса, относительно которого вычисляются все моменты, точку О на плоскости, являющуюся проекцией на эту плоскость центра инерции бруска в начальный момент времени (рис. 7.18). Тогда момент
силы трения относительно этой точки равен нулю, поскольку сила |
||||||||
|
|
|
|
N |
|
|
и радиус-вектор её точки приложе- |
|
|
|
|
|
|
|
ния коллинеарны. Нормальная ком- |
||
|
|
|
|
|
|
V |
||
|
ци |
|
|
ци |
|
|||
|
Fтр |
|
|
h |
понента силы реакции опоры урав- |
|||
|
• |
|
x |
|
||||
|
O • |
|
|
|
|
|
|
новешена силой тяжести. Получает- |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
mg |
|
|
ся, будто сумма моментов сил равна |
|
|
|
Рис. 7.18 |
|
|
нулю, и момент импульса изменить- |
|||
|
|
|
|
|
|
|
|
ся не может? |
Решение. В задаче 7.15 показано, что при торможении автомобиль приседает на передние колёса, т.е. на передние колёса давление больше, чем на задние. В данной задаче та же самая ситуация, т.е. давление на плоскость со стороны передней части бруска больше, чем со стороны задней. Это означает, что нормальная компонента силы реакции опоры смещена вперёд. Обозначим это сме-
114

щение через х. Эту величину легко найти. Действительно, брусок не вращается, поэтому сумма моментов сил, приложенных к бруску, относительно его центра инерции равна нулю:
Nx – Fтрh/2 = 0. (1)
Поскольку сила трения является силой трения скольжения, и равна, поэтому kN, то согласно (1)
x = kh2 .
Тем самым, сила тяжести и нормальная компонента силы реакции плоскости образуют пару сил с моментом mgx = kmgh/2. Этотто момент и вызывает уменьшение момента импульса L бруска, который в силу того, что брусок движется поступательно, равен L = = mVh/2. Действительно, производная момента импульса по времени равна
dL |
= |
mh |
|
dV |
. |
(2) |
dt |
|
|
||||
|
2 dt |
|
||||
С другой стороны, эта производная равна моменту сил, приложенных к бруску:
dL |
= − |
kmgh |
. |
(3) |
dt |
|
|||
2 |
|
|
||
Поскольку при движении бруска справедлив второй закон Ньютона:
m dVdt = −kmg,
то видим, что правые части (2) и (3) совпадают. Догадка наша оказалась верной.
Итак, «виновата» во всём сила трения. Однако момент импульса уменьшает не она сама, а созданный ею момент пары силы тяжести и нормальной компоненты силы реакции поверхности.
Задача 7.17. Тонкий однородный стержень вращается вокруг неподвижной оси, проходящей через центр стержня, и образующей с ним угол α. Найти вектор момента импульса стержня относительно его центра.
Решение. Выберем связанную со стержнем систему координат, в которой ось OX направлена вдоль стержня, а ось OY – располо-
115

Y ω
L ωх
ωy α
Рис. 7.19
жена перпендикулярно стержню в
Xплоскости, образованной стержнем и его осью вращения (рис. 7.19). Начало координат выберем в центре стержня. Оси этой системы координат являются главными осями инерции стержня. Тогда вектор момента импульса стержня запишем следующим образом:
L = Ixωx + Iyωy.
Здесь Ix и Iy – моменты инерции относительно главных осей OX и OY, а ωx и ωy – компоненты вектора угловой скорости, параллельные OX и OY. Но момент инерции Ix = 0, поскольку он пропорционален квадрату толщины стержня, а она равна нулю. Тем самым, вектор момента импульса направлен перпендикулярно стержню вдоль оси OY:
L = Iyωy.
Модуль вектора момента импульса:
L = ml2 ωsin α. 12
Здесь l – длина стержня, т – его масса.
Этот же результат можно получить иначе, если мысленно разбить стержень на пары симметричных относительно центра стержня малых частей, и найти моменты импульса каждой такой пары. Проведите эти вычисления самостоятельно.
Задача 7.18. Реактивный истребитель, двигаясь со скоростью υ = 200 м/с, совершает разворот, радиусом R = 1 км. Турбина самолёта имеет момент инерции I = 100 кг м2 и вращается со скоростью n = 6000 об/мин. Найти величину гироскопических сил, действующих на подшипники, в которых вращается ось турбины, если расстояние между подшипниками l = 3 м. Останется ли лётчик цел и невредим при таком вираже?
Решение. Рассмотрим движение турбины вместе с самолётом за малый промежуток времени dt. За это время самолёт пройдёт расстояние V dt, следовательно, его радиус-вектор повернётся на угол
116

dϕ = V dt/R. На такой же угол вместе с самолётом повернётся и ось турбины, и её момент импульса. Тем самым, величина изменения момента импульса турбины (рис. 7.20):
|
dL= L dϕ. |
|
|
|
L' |
dL |
|||||||
Вектор и величина момента |
M |
||||||||||||
|
L |
||||||||||||
сил, действующих на турбину, |
|
|
dϕ |
||||||||||
согласно уравнению |
моментов |
|
|
|
|||||||||
найдутся как: |
dL |
|
|
|
|
|
|
|
|
||||
|
M = |
, |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
dt |
|
|
R |
|
L |
|||||
M = |
dL |
= L |
dϕ |
= |
|
LV |
. |
|
|||||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||
|
dt |
|
dt |
R |
dϕ |
|
|
||||||
Направление |
|
вектора мо- |
|
|
|||||||||
|
|
|
|
||||||||||
мента сил, как видим из черте- |
|
Турбина |
|||||||||||
жа, перпендикулярно |
вектору |
Рис. 7.20 |
|
|
|||||||||
момента импульса турбины. Поскольку, как и всякая ось симметрии, ось турбины является её
главной осью инерции, то величину момента импульса равна произведению её момента инерции I на угловую скорость вращения турбины ω = 2πn.
Откуда найдём величину момента гироскопических сил:
M = |
2πnIV |
= |
2 3,14 102 102 200 |
= 6,28 103 |
Н м. |
|
R |
|
103 |
|
|
Разделив момент на расстояние между подшипниками, найдём величину гироскопических сил N:
N = M/l = 2,1 103 Н.
Силы реакции подшипников образуют пару сил. Они направлены перпендикулярно оси турбины и лежат в вертикальной плоскости, перпендикулярной вектору момента сил
(рис. 7.21).
Такое направление сил, действующих на турбину со стороны подшипников, означает, что передняя часть турбины при повороте стремится подняться вверх, а задняя – опуститься. Таким образом,
117

на самолёт со стороны турбины действует момент силы, стремящийся поднять вверх нос самолёта.
Для ответа на второй вопрос найдём ускорение самолёта. При равномерном движении по окружности ускорение самолёта равно
его нормальному ускорению an: |
|
|
|
|||||
a |
n |
= |
V 2 |
= |
4 104 |
= 40 м/с |
2 |
= 4g. |
R |
103 |
|
||||||
|
|
|
|
|
|
|||
Величина силы реакции кресла, действующей на лётчика равна модулю суммы сил тяжести и центростремительной силы:
N = mg + man ,
N = m g2 + an2 = mg 1 + 42 ≈ 4mg.
Как видим, сила реакции приблизительно в 4 раза больше силы тяжести. Это заметная перегрузка, но далеко не смертельная. Опасными для человека считаются перегрузки, которые более чем в 10 раз превосходят силу тяжести.
Задача 7.19. Цилиндрическая мельница представляет собой массивный цилиндр (бегун), способный вращаться вокруг своей горизонтальной геометрической оси. Этот цилиндр приводится во вращение вокруг вертикальной оси и катится по горизонтальной опорной плите. Такое движение можно рассматривать как вынужденную прецессию гироскопа, каковым является бегун. При этом в результате гироскопических эффектов сила давления бегуна на опору возрастает. Эта сила измельчает и растирает материал, подсыпаемый под бегун. Вычислить силу давления бегуна на опору, если его радиус R = 0,5 м, а его рабочая скорость вращения вокруг вертикальной оси n = 1 об/с.
Решение. Рассмотрим точку А
Ωсоприкосновения бегуна с поверх-
|
O |
|
ностью |
(рис. |
7.22). Поскольку |
|||
Q |
|
N |
||||||
r |
скольжения нет, то скорость этой |
|||||||
|
||||||||
|
L1 |
|
точки равна нулю. Поэтому ско- |
|||||
|
O’ |
R |
рость центра бегуна О’ можно за- |
|||||
|
|
писать как ωR, где ω – скорость |
||||||
|
A |
ω |
||||||
|
вращения |
бегуна |
вокруг |
горизон- |
||||
|
|
mg |
тальной оси. |
С |
другой |
стороны, |
||
|
Рис. 7.22 |
|
||||||
|
|
|
|
|
|
|
||
118

скорость центра бегуна можно записать как Ω r, где r – расстояние от вертикальной оси вращения до центра бегуна. Откуда выразим ω
через Ω:
ω= Ω Rr .
Вращение бегуна вокруг горизонтальной оси приводит к появлению у бегуна момента импульса L1 = Iω. Вращение бегуна вокруг вертикальной оси сообщает ему момент импульса L2 = (I+mr2)Ω относительно шарнира О. Следовательно, момент импульса бегуна относительно шарнира О равен
L = I ω + I ' Ω.
Здесь I ' = I + mr2.
Заметим, что момент L1 имеет постоянную величину, но направление его непрерывно изменяется, поскольку ось бегуна поворачивается, а вместе с нею поворачивается и вектор ω. Вектор L2 сохраняет неизменное направление и величину. Таким образом, производная по времени от вектора момента импульса определяется изменением только момента L1. Поскольку этот вектор имеет неизменную длину, и вращается вокруг вертикальной оси со скоростью Ω, то его производная находится так же, как и производная радиус-вектора точки, вращающейся вокруг оси с известной угловой скоростью Ω:
ddtL = ddtL1 =[Ω,L1 ]= I [Ω,ω].
Нетрудно заметить, что векторное произведение угловых скоростей имеет горизонтальное направление, перпендикулярное оси шара, поскольку вектор Ω направлен вертикально, а вектор ω совпадает по направлению с направлением горизонтальной оси. С другой стороны, согласно уравнению моментов:
I [Ω,ω]=M ,
где М – вектор моментов сил, приложенных к шару. Поскольку момент импульса мы определяли относительно шарнира О, то и момент сил надо определять также относительно центра шара. Но в этом случае момент силы реакции Q со стороны шарнира (см. рис. 7.22) равен нулю, поскольку эта сила приложена к шарниру. Тем
119

самым момент сил создают сила тяжести и нормальная компонента силы реакции поверхности:
I [Ω,ω]=[r, mg + N] .
Спроецировав это уравнение на горизонтальное направление, перпендикулярное горизонтальной оси, получим:
IΩ |
2 |
r |
= r(N − mg), N = mg + |
IΩ2 |
. |
|
R |
R |
|||
|
|
|
|
Учитывая, что момент инерции бегуна относительно его диаметра равен mR2/2, найдём:
N= mg 1 + RΩ2 .
2g
Если бегун совершает 1 оборот в секунду вокруг вертикальной оси, то его угловая скорость вращения Ω = 2π, поэтому выражение в скобках будет
RΩ2 |
≈ |
0,5 4 π2 |
≈ |
π2 |
≈1. |
|
2g |
2 g |
g |
||||
|
|
|
Таким образом, сила давления почти вдвое превосходит вес неподвижного бегуна. Если бегун будет совершать порядка трёх – четырёх оборотов в секунду, то сила давления вырастет на порядок по сравнению с весом неподвижного бегуна.
Мистики в этом никакой нет. Сила реакции возрастает при движении бегуна благодаря реакции шарнира (сила Q на рис. 7.22). Эта сила имеет вертикальную составляющую, направленную вниз, т.е. она прижимает бегун к поверхности, что и приводит к возрастанию давления шара на поверхность. Сравните этот результат с предыдущей задачей.
120
8. ДВИЖЕНИЕ ТЕЛ В НЕИНЕРЦИАЛЬНЫХ СИСТЕМАХ ОТСЧЕТА. СИЛЫ ИНЕРЦИИ
В ряде случаев решение задач динамики удобнее производить, рассматривая движение тел относительно неинерциальных систем отсчета, т.е. таких систем отсчета, которые движутся ускоренно относительно инерциальной системы отсчета.
Пусть К – исходная, неподвижная (наша лабораторная) инерциальная система отсчета. Рассмотрим также систему К', которая движется относительно К. Движение системы К ' можно представить как вращение с угловой скоростью ω вокруг оси, которая в свою очередь, движется относительно К. Начало отсчета в К ' вы-
берем на оси вращения (рис. 8.1). |
|
|
|
|
Тогда для точки т: |
|
m• |
|
|
V = V0 + [ω,r'] +V', |
|
Z' |
r' |
Y' |
где V0 скорость начала отсчета сис- |
|
|
||
|
Z r |
|
|
|
темы К ' (точки O ' на рис. 8.1) от- |
|
|
O' |
|
|
|
|
||
носительно К, а V и V' скорость |
|
R |
K' |
X' |
точки m соответственно относи- |
|
|
||
|
|
|
|
|
тельно К и К '. |
O |
Y |
|
|
Если ограничиться случаем, ко- |
|
|
||
|
K |
|
|
|
гда вектор угловой скорости ω вра- |
X |
|
|
|
щения системы К ' остаётся посто- |
|
|
|
янным, то имеет место соотношение между ускорением частицы а по отношению к системе отсчёта К и
её же ускорением а' по отношению к системе отсчёта К ': a = a0 +2[ω, V '] +[[r ',ω],ω] +a' .
Здесь а0 ускорение начала отсчета системы К ' (точки O ' на рис. 8.1) относительно К, а а и а' ускорение точки m относительно К и, соответственно, К '
Умножая обе части последнего соотношения на массу частицы m, и учитывая, что относительно К справедлив второй закон Ньютона
ma = F,
получим
ma' = F −ma0 + 2m[V ',ω] + m[ω,[r ',ω]].
121

Это уравнение есть основное уравнение динамики в неинерциальной системе отсчета. Как видим, а' вообще говоря, отлично от нуля даже в случае F = 0, т.е. когда тело не взаимодействует с другими телами. Мы видим, таким образом, что ускоренное движение системы отсчета эквивалентно появлению сил инерции.
Первая из сил инерции (–ma0) связана с ускоренным поступательным движением неинерциальной системы отсчета. Как видим, такое движение системы отсчета, в смысле своего влияния на уравнение движения тела эквивалентно появлению однородного силового поля, причем сила, действующая в этом поле, равна произведению массы тела на ускорение системы отсчета а0 и направлена в противоположную этому ускорению сторону.
Сила 2т[V',ω] называется силой Кориолиса. Ее особенность состоит в том, что она зависит от скорости частицы V' относительно К'. Сила Кориолиса перпендикулярна вектору скорости частицы V' относительно К' и, следовательно, не совершает над ней работы.
Последняя сила т[ω,[r',ω]] называется центробежной. Нетрудно заметить, что ее можно записать в виде
ω |
|
mω2R, где R – вектор, проведенный перпенди- |
||||
R |
|
кулярно оси вращения к точке т (рис. 8.2). |
||||
|
Центробежная сила потенциальна, т.е. ее |
|||||
m |
||||||
можно записать в виде |
||||||
• |
Fцб |
|
FR = – dUцб/dR, |
|||
r' |
|
где FR |
– проекция Fцб на направление вектора |
|||
|
|
R. Uцб |
можно назвать центробежной потенци- |
|||
О' |
|
альной энергией, а сама эта энергия равна |
||||
Рис. 8.2 |
|
Uцб = − |
mω2 R2 |
. |
||
|
|
|||||
|
|
|
2 |
|
||
Задача 8.1. На тележке, движущейся прямолинейно по горизонтальной поверхности с ускорением a укреплен штатив, к которому на невесомой нити подвешен маленький тяжелый шарик. Найти угол отклонения нити с шариком от вертикали. Решить задачу как с точки зрения неподвижного наблюдателя K, так и наблюдателя K', движущегося вместе с тележкой.
Решение. Рассмотрим сначала движение шарика относительно неподвижного наблюдателя (рис. 8.3). Это движение происходит в
122

горизонтальном направлении с ускорением а. При этом на шарик действуют две силы: сила тяжести mg и натяжения нити N. Запишем уравнение второго закона Ньютона в проекциях на горизонтальное и вертикальное направления:
ma = N sinα, |
|
α |
|
0 = N cosα – mg. |
K |
N |
|
Исключив отсюда N, получим |
|||
|
|
|
a |
|
|
|
mg |
|
|
|
a |
|
tg α = g . |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
Рассмотрим теперь |
движение |
|
|
|
|
|
||||
|
|
|
|
|
||||||
шарика относительно наблюдателя |
Рис. 8.3 |
|||||||||
K', движущегося вместе с тележкой |
||||||||||
|
|
|
|
|
||||||
(рис. 8.4). Шарик относительно те- |
K ' |
|
|
|
|
|||||
α |
|
|
||||||||
лежки покоится, но поскольку сис- |
|
|||||||||
тема отсчета K', связанная с тележ- |
N |
|
|
|
|
|||||
кой, неинерциальна, то условие |
–ma |
|
|
|
|
|||||
равновесия шарика надо рассматри- |
mg |
|
|
|
a |
|||||
вать с учетом сил инерции. Тележка |
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
движется поступательно, |
поэтому |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
на шарик действует сила инерции, равная –та. Кроме нее, на шарик действуют также сила тяжести mg и
сила натяжения нити N. Сумма этих трех сил должна быть равна нулю, так как шарик в выбранной нами системе отсчета покоится. Записывая условия равновесия шарика в проекциях на горизонтальное и вертикальное направления, получим систему уравнений:
0 = N sinα – ma,
0 = N cosα – mg.
Исключив отсюда N, получим: tg α = ag .
Как видим, решение этой задачи каждым из двух рассмотренных здесь способов совершенно одинаково. Это относится ко многим задачам механики, но не следует думать, что переход к неинерциальным системам отсчета не дает преимуществ никогда. В ряде задач такой переход сильно упрощает решение.
123

Задача 8.2. Брусок А движется с ускорением а по горизонталь- |
|||||||
ной поверхности. На бруске А лежит другой брусок B, высота кото- |
|||||||
рого h, а длина – l (рис. 8.5). Брусок В упирается левой своей гранью |
|||||||
в небольшой выступ на поверхности бруска А. При каких значениях |
|||||||
ускорения а брусок В не будет опрокидываться? Решить задачу как с |
|||||||
точки зрения неподвижного наблюдателя K, так и с точки зрения на- |
|||||||
блюдателя K', движущегося вместе с бруском А. |
|
|
|||||
Решение. Рассмотрим сначала решение задачи в неинерциаль- |
|||||||
ной системе отсчета, связанной с бруском А (с точки зрения на- |
|||||||
блюдателя K'). |
|
|
|
|
|
|
|
На брусок В действуют сила тяжести mg, сила со стороны усту- |
|||||||
па Q, и сила реакции N со стороны горизонтальной поверхности |
|||||||
бруска А, сила инерции – та. Предположим, что брусок В не опро- |
|||||||
кидывается тогда в выбранной системе отсчета он покоится. |
|||||||
Условия равновесия бруска состоят в равенстве нулю суммы |
|||||||
K |
K ' |
|
|
сил, действующих на брусок, и ра- |
|||
|
|
венстве |
нулю |
суммы |
моментов |
||
|
|
|
|||||
|
N |
l |
B |
этих сил. Первое из этих двух ус- |
|||
|
|
ловий в проекциях на координат- |
|||||
|
|
m |
a |
||||
|
h |
Q |
ные оси |
(рис. |
8.6) дает систему |
||
|
|
|
|
уравнений: |
|
|
|
|
|
|
A |
|
|
||
///////////////////////////////////////////////////////// |
|
Q −ma = 0, |
|
||||
|
|
|
mg |
|
|
||
|
Рис. 8.5 |
|
|
|
|
|
|
|
|
|
|
N −mg = 0. |
|
||
|
|
|
|
|
|
||
Для записи второго условия необходимо указать точки приложения сил, действующих на брусок. Точка приложения силы тяжести находится в центре инерции бруска. В этой же точке приложена сила инерции – та. Это утверждение основано на том, что в данном случае поле сил инерции полностью эквивалентно полю сил тяжести (оба поля однородны, силы в обоих полях пропорциональны массе тела). Поэтому и точки приложения соответствующих сил совпадают. Пусть точка приложения силы N находится на расстоянии х от середины бруска (рис.8.6).Условие равенства нулю суммы моментов справедливо относительно любой оси, если сумма сил равна нулю (что выполняется в нашем случае). Удобнее всего выбрать ось, проходящую через центр инерции бруска, перпенди-
124

кулярно плоскости чертежа. (Почему эта ось наиболее удобна? Объясните сами.). При таком выборе оси, мы получаем следующее уравнение моментов:
|
h |
Y |
|
|
N l |
B |
|
|||||||||
Q |
|
− Nx = 0. |
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
–ma |
|
|
|
|
|
|
|
||||||
|
|
|
|
Q |
|
m |
|
|||||||||
Из выписанных уравнений на- |
|
|
|
h |
|
|
|
|||||||||
ходим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
X |
|
|
|
|
|
|
|
////////////////////////////////////////////// |
|
|
|||||||
|
|
|
h a |
|
|
|
|
|
mg |
|
||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = 2 g . |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
Рис. 8.6 |
|
|
|
|
|||||||
Полученный результат показы-
вает, что х растет с ростом а, т.е. точка приложения силы N смещается в сторону выступа (влево на рис. 8.6). Но поскольку х < l/2, так как точка приложения силы N не может располагаться за пределами бруска В, то получаем
h2 ag < 2l .
Окончательно находим:
a < g hl .
Рассмотрим теперь решение задачи в инерциальной системе отсчета (с точки зрения неподвижного наблюдателя К). По отношению к наблюдателю K, брусок В движется поступательно в горизонтальном направлении с ускорением а под действием сил Q, N и mg (см. рис. 8.6). Поэтому
ma = Q + mg + N.
Проецируя это уравнение на координатные оси, получаем:
ma = Q,
0 = N − mg.
Учтем теперь, что движение бруска В поступательное. Поэтому можно утверждать, что относительно горизонтальной оси, проходящей через центр инерции бруска, момент импульса бруска L0 равен нулю (брусок не вращается). Можно выбрать также любую другую ось, но тогда уравнение моментов усложнится. Попробуйте решить задачу, выбрав ось, проходящую вдоль выступа. Учтите
125

только, что момент импульса твердого тела, вообще говоря, определяется теоремой Кёнига (см. введение к п. 6):
L = L0 + [R,P].
Поскольку dL0/dt = М, где М – момент сил, действующих на брусок относительно указанной оси, а L0 = 0, то dL0/dt = 0 и, соответственно, М = 0. Момент сил, действующих на брусок В относительно данной оси определяется лишь силами Q и N, так как сила тяжести приложена к оси и поэтому ее момент равен нулю. Поэтому для момента М имеем:
M = Q h2 − Nx.
Так как М = 0, то для х получаем: x = h2 ga .
Поскольку х < l/2, то вновь получаем прежнее условие, при котором брусок В не отрывается от опоры:
a < g hl .
Полученному ответу можно дать наглядную геометрическую интерпретацию. А именно, брусок В оторвется от опоры (это про-
изойдет, когда a > g hl ), если равнодействующая сил Q и N будет
проходить ниже центра тяжести бруска В. Убедитесь в этом самостоятельно. Учтите только, что при отрыве бруска В сила N приложена к краю бруска, который соприкасается с выступом.
Задача 8.3. Из центра вращающейся карусели радиуса R, по мишени, установленной на краю карусели в точке А производится выстрел. Найти отклонение пули от мишени, если угловая скорость вращения
ωкарусели равна ω, скорость пули –V. При
О |
V |
расчете принять ωR << V. |
|
Решение. Рассмотрим движение пули |
|
|
S А |
|
|
относительно инерциальной системы от- |
Всчета, связанной с землей (рис. 8.7). От-
Рис. 8.7 |
носительно земли пуля движется прямо- |
126

линейно со скоростью V, поэтому она долетит от центра до края карусели за время t > R/V. Но за это же время карусель повернется на угол ϕ = ωt = ωR/V, и попадёт не в точку А, а точку В, причем угол между радиусами ОА и ОВ равен, как видим, углу поворота карусели ϕ. Расстояние по краю карусели между точками А и В:
ωVR2 .
Рассмотрим теперь движение пули в системе отсчёта, связанной с каруселью. Эта система отсчета неинерциальная, поэтому на пулю в процессе ее движения действуют центробежная сила
Fцб = mω2r,
и сила Кориолиса
FК = 2m[V',ω].
Поскольку, согласно условию, ωR<<V, то Fцб/FК ~ ωR/V<< 1, то влиянием центробежной силы, ввиду ее малости по сравнению с
силой Кориолиса, мы полностью пренебрежём.
Сила Кориолиса направлена перпендикулярно скорости пули V', поэтому она будет вызывать отклонение пули вбок. Поскольку, согласно условию задачи выполняется сильное неравенство ωR<<V, которое означает, что карусель вращается сравнительно медленно. Поэтому сила Кориолиса оказывает слабое возмущающее воздействие на движение пули. Но это означает, что если представить скорость пули V' в виде
V' = V + V1,
где V – начальная скорость пули, а V1 – поправка к скорости, вызванная силой Кориолиса, то V1<<V. Поэтому в выражении для силы Кориолиса FК = 2т[V',ω], можно с хорошей точностью заменить V' на V. Такая замена, мало изменяя FК, упрощает задачу, поскольку сила Кориолиса оказывается теперь постоянной, соответственно, оказывается постоянным и вызванное ею ускорение аК = 2[V,ω].
Интегрируя по времени соотношение dV'/dt = aК, получим с учетом того, что в начальный момент V' = V:
V' = V + aКt.
Полученное соотношение показывает, что в радиальном направлении (направлении выстрела) пуля движется с постоянной
127

скоростью V, а в перпендикулярном направлении ее скорость линейно возрастает со временем (рис. 8.8). Интегрируя по времени соотношение dr'/dt=V', с учетом выражения для V' получим
A
V Vотн B
R
 V1=аКt
V1=аКt
O
Рис. 8.8
r ' = Vt + aK2t2 .
Первое слагаемое в полученном выражении представляет собой перемещение пули в направлении выстрела, второе – в боковом направлении.
Пуля долетит до края карусели через время t = R/V. За это же время пуля отклонится вбок на расстояние
s = |
a |
|
t2 |
= |
a |
K |
|
R 2 |
|
K |
|
|
|
. |
|||
|
|
|
|
|||||
|
|
2 |
|
2 V |
||||
В нашем случае aК = 2Vω, поэтому:
s = |
a |
K |
|
R 2 |
2V ω |
R 2 |
ωR2 |
|
||||
|
|
|
|
= |
2 |
|
|
= |
V |
, |
||
|
|
|
||||||||||
|
2 V |
|
V |
|
|
|||||||
что полностью совпадает с прежним результатом. Поделив s на R, получим угол, на который отклонится пуля от первоначального направления за время полета:
Rs = ωVR .
Согласно условию задачи
ωVR <<1,
поэтому пуля отклоняется на малый угол. Это показывает, что использованное нами соображение о малости влияния силы Кориолиса подтверждается окончательным результатом.
Задача 8.4. С высокой башни, расположенной на экваторе, свободно падает тело. В каком направлении, и на какое расстояние отклонится тело от вертикали вследствие вращения Земли? Сделать численную оценку, приняв высоту башни равной 500 м.
Решение. Вследствие суточного вращения Земли система отсчёта связанная с нею является неинерциальной системой отсчёта. В процессе падения тела на него помимо силы тяжести действуют
128

также центробежная сила и сила Кориолиса. Центробежная сила в условиях задачи направлена навстречу силе тяжести и несколько уменьшает ускорение свободного падения тела. Сила Кориолиса направлена перпендикулярно скорости тела, т.е. действует параллельно поверхности земли. Направлена она к востоку, поскольку вектор угловой скорости вращения Земли (точки экватора движутся с запада на восток) направлен от южного полюса к северному
(рис. 8.9):
FК =2 m[V,ω].
Угловая скорость вращения Земли весьма мала:
ω= |
2π |
= |
6, 28 |
= 0,73 10−4 c-1 , |
|
T |
24 3600 |
||||
|
|
|
С
ω
R
здесь Т – продолжительность земных су- |
|
mg V |
FК |
||||||
ток. |
|
|
|
|
|
||||
|
|
|
|
|
m• |
|
|||
Ввиду малой величины угловой ско- |
|
|
|||||||
Ю |
Fцб |
||||||||
рости Земли, можно пренебречь в данной |
|||||||||
|
Рис. 8.9 |
|
|||||||
задаче центробежной силой, поскольку |
|
|
|||||||
|
|
|
|||||||
она составляет приблизительно 1/300 величины силы тяжести: |
|
||||||||
|
Fцб |
= |
ω2 R |
≈ |
0,5 10−86,4 106 |
= 3,2 10 |
−3 |
|
|
|
|
g |
|
. |
|
||||
|
mg |
10 |
|
||||||
Рассмотрим теперь действие силы Кориолиса. Сила эта также мала, поэтому отклонение тела, вызванное этой силой, также относительно невелико. Поэтому при вычислении силы Кориолиса FК =2 m[V,ω] можно в качестве скорости брать ту скорость, которую имело бы падающее тело в отсутствии силы Кориолиса, т.е. V = gt, где t – продолжительность падения тела. Поскольку векторы g и ω взаимно ортогональны, величина силы Кориолиса равна
FК = 2 mVω = 2mgtω.
Поскольку сила Кориолиса направлена к востоку (см. рис. 8.9), то и ускорение Кориолиса также направлено на восток, и величина его:
aК = FК/m =2Vω = 2ωgt.
Если обозначить скорость, приобретаемую падающим телом, под действием силы Кориолиса через U, то для неё, согласно определению ускорения:
129

aK = dUdt = 2gωt ,
откуда после интегрирования найдём U = gωt2.
Интегрируя по времени ещё раз, найдём отклонение тела: s = gω3t3 .
Подставив сюда время падения тела с высоты H, найдём величину отклонения тела как функцию высоты:
|
|
|
|
|
|
|
t = |
|
2H |
, |
|
|
|
||
|
|
|
|
|
|
|
|
g |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s = |
gωt3 |
|
gω |
2H 3/2 |
|
10 |
0,73 |
10−4 |
2 500 |
3/2 |
|||||
|
= |
|
|
g |
|
= |
|
|
|
|
|
|
|
≈ 24 см. |
|
3 |
3 |
|
3 |
|
10 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Рассмотрим теперь решение этой же задачи с точки зрения наблюдателя, находящегося в некоторой инерциальной системе отсчёта, например, связанной со звёздами, которые можно считать неподвижными. В этой системе отсчёта всё объясняется как будто бы очень просто: верхушка башни вращается вокруг оси со скоростью ω(R+H), а поверхность Земли имеет скорость ωR. Таким образом, тело относительно поверхности Земли движется со скоростью
ω(R+H) – ωR = ωH,
поэтому за время падения оно отклонится к востоку на расстояние
s ' = ωHt = ωH |
2H |
= |
gω |
|
2H |
3/2 |
= |
3 |
s. |
g |
|
|
2 |
||||||
|
2 |
g |
|
|
|
||||
Ответ мы получили в полтора раза больше, чем в первом случае. Где же истина? Какое решение ошибочно? Разгадка не столь проста, как оказывается. Дело в том, что для получения правильного ответа необходимо учитывать кривизну поверхности Земли. Действительно, давайте оценим время падения тела и расстояние, которое пройдёт за это время точка на поверхности Земли, и конечно само это тело:
t = |
2H |
= |
2 500 |
=10 с, |
|
g |
10 |
||||
|
|
|
130
s = Rωt = 6,4 106 0,73 10−4 10 ≈ 4,7 103 м ~ 5 км.
Как видим, это расстояние довольно большое, во всяком случае, оно превосходит расстояние до линии горизонта (попробуйте сами оценить это расстояние, зная размеры Земли и свой рост), а наличие горизонта как раз и указывает на кривизну земной поверхности. Вследствие кривизны земной поверхности направление силы тяжести зависит от местонахождения тела (рис. 8.10). Поэтому движение тела в горизонтальном направлении не будет равномерным, необходимо учесть проекцию силы тяжести на это направление:
m dVdtx = −mg Rx .
Поскольку x << R, то производная dVx/dt << g, что позволяет упростить это уравнение, полагая в правой части x =
= ωRt. Откуда получаем: dVdtx = −g ωRR t,
Vx = ω(R + H ) −ωg t2 . 2
Интегрируя ещё раз, найдём перемещение тела:
x = ω(R + H )t −ωg t3 . 6
O |
|
• 2 X |
1 • |
x |
|
mg |
mg |
|
R |
|
|
Рис. 8.10
Вычитая из найденного перемещения тела x перемещение земной поверхности ωRt, найдём перемещение тела относительно поверхности Земли:
|
t |
3 |
|
2H |
|
ωg |
|
2H |
|
3/2 |
|
gω |
|
2H |
|
3/2 |
s =ωHt −ωg |
=ωH |
− |
|
|
|
= |
|
. |
||||||||
|
|
|
|
|
||||||||||||
|
|
g |
6 |
g |
|
|
g |
|||||||||
6 |
|
|
|
|
|
3 |
|
|
|
|||||||
Теперь ответ совпал с предыдущим.
Задача 8.5. Небольшая муфта массы m находится на гладком горизонтальном стержне, который вращается с постоянной угловой скоростью ω вокруг неподвижной вертикальной оси, проходящей через один из его концов. Муфта удерживается нитью, конец которой прикреплен к оси, на расстоянии r0 от неё. В некоторый момент
131

нить пережигают. Найти скорость муфты относительно стержня в тот момент, когда она находится на расстоянии r от оси.
Решение. Эту задачу удобнее всего решать, рассматривая движение муфты относительно вращающейся системы отсчета, жестко связанной со стержнем (рис. 8.11). Движение муфты в этой системе отсчета происходит вдоль стержня и вызвано центробежной силой, остальные три силы, действующие на муфту: сила тяжести, сила реакции стержня и сила Кориолиса направлены перпендикулярно стержню и, следовательно, их сумма равна нулю. Центробежная сила потенциальна, работа же трех других сил равна нулю, поэтому мы можем найти скорость V муфты с помощью закона сохранения энергии:
|
|
|
mω2r2 |
mV 2 |
|
mω2r2 |
|
||
ω |
|
− |
2 |
0 = |
2 |
− |
2 . |
(1) |
|
N |
|
|
|
|
|||||
r |
Здесь мы учли, что в начальный мо- |
||||||||
|
мент муфта находилась на расстоянии r0 |
||||||||
m |
V |
от оси и покоилась, потенциальная энер- |
|||||||
гия тела в поле центробежной силы равна |
|||||||||
FК |
|
||||||||
Fцб |
–mω2r2/2, где r – расстояние тела от оси |
||||||||
|
|||||||||
|
вращения. Из (1) находим: |
|
|||||||
Рис. 8.11 |
|
|
|
V = ω r |
2 −r2 . |
|
|||
|
|
|
|
|
|
|
0 |
|
|
Решение, как видим, очень простое. Но возникает вопрос: а как объяснить полученный результат с точки зрения наблюдателя, следящего за движением муфты из неподвижной системы отсчета? Ведь в этой системе отсчета никаких сил инерции нет.
На муфту в неподвижной системе отсчета действуют две силы: тяжести mg и реакции стержня N. Разложим силу реакции на вертикальную Р и горизонтальную Q составляющие, тогда Р уравновешивается силой тяжести, и равнодействующая сил mg и N, действующих на муфту, оказывается равной Q. Очевидно, что именно эта сила и изменяет скорость муфты. Действительно, работа силы Q не равна нулю, так как она не перпендикулярна скорости муфты, которую, в свою очередь, можно представить как сумму относительной скорости муфты (она направлена вдоль стержня) и пере-
132

носной скорости стержня, которая перпендикулярна стержню и равна по модулю ωr (см. рис. 8.12).
Найдем мощность силы реакции:
(Q,V) = (Q,Vпер+ Vотн) =
= (Q,Vпер) = Qrω.
Мощность силы, действующей на муфту равна производной
по времени от кинетической энергии муфты:
ω |
N |
|
|
|
P |
r
 Q
Q  m
m 
Vотн
mg
Рис. 8.12
|
d |
|
|
2 |
|
d |
|
|
|
Qωr = |
mV |
|
= |
m (Vпер2 |
+Vотн2 ) . |
||||
|
|
||||||||
|
dt |
2 |
|
|
dt 2 |
|
|||
Выполняя дифференцирование, получим уравнение
Qωr = m VперVi пер +VотнVi отн .
i i
Но V пер = ωr = ωVотн , таким образом:
Qωr = mVотн ω2r +Vi отн .
Vпер
V
(2)
Сила Q нам неизвестна. Ее можно найти из уравнения моментов, примененного к муфте. Действительно момент Lz импульса муфты относительно оси вращения равен mrVпер, но Vпер = ωr, тогда:
Lz =mr2ω.
Найдем производную по времени от
|
2 |
) = 2mωr r |
dLz = mωd (r |
||
|
|
i |
dt |
dt |
|
Lz:
= 2mωrVотн.
Найдем теперь момент относительно оси вращения сил, действующих на шайбу. Этот момент равен по модулю Qr, так как сила Q перпендикулярна стержню. Таким образом, уравнение моментов имеет вид
2mωrVотн = Qr,
откуда находим
Q = 2mωVотн. |
(3) |
Из (2) и (3) получаем:
133

|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
i |
|
|
, |
|
|||||
|
|
|
|
|
2mω Vотнr = mVотн |
ω r |
+V отн |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда найдём: |
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
= ω2r. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4) |
|||||
|
|
|
|
|
|
|
|
V отн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Умножим (4) на Vотн = dr/dt и учтем, что: |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
d |
|
|
2 |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
d |
|
|
|
2 |
|
|
|
i |
||||
|
|
|
|
Vотн |
=Vотн V отн, |
|
|
|
|
|
|
|
|
r |
|
|
= r r. |
||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|
|||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||
Тогда (4) преобразуется следующим образом: |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
V |
|
V |
|
= ω2r dr , |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
отн |
|
отн |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d |
Vотн2 |
= |
|
d |
ω2r2 |
, |
|
d |
|
Vотн2 |
− |
ω2r2 |
= 0. |
|||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
||||||||||||||||||||||||
|
dt 2 |
|
|
dt 2 |
|
|
|
|
|
dt 2 |
|
|
|
|
|||||||||||||||||||
Из последнего уравнения получаем: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
V |
2 |
|
− |
ω2r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
||||||
|
|
|
|
|
|
|
|
|
отн |
|
|
2 |
|
|
= const. |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из начального условия |
|
Vотн = 0 при r = r0 |
найдём константу в |
||||||||||||||||||||||||||||||
правой части: |
|
|
|
|
|
|
|
|
|
|
|
|
ω2 r2 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
const = − |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
. |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Уравнение (5) приобретает вид: |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
mω2 r2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
mV 2 |
|
− |
|
mω2 r |
2 |
= − |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
, |
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
откуда находим скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
V |
|
|
|
= ω r2 −r2 . |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
отн |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
Как видим, оба подхода вновь дали одинаковый результат, но решение задачи в неинерциальной системе отсчета оказалось значительно проще.
Задача 8.6. Небольшой шарик подвешен на невесомом стержне длины l. Верхний конец стержня шарнирно прикреплен к вертикальной оси, вращающейся с угловой скоростью ω. Найти угол отклонения стержня от вертикали.
Решение. Задачу удобно решать в системе отсчета, вращающейся вместе с шариком вокруг вертикальной оси с угловой скоро-
134

стью ω. В этой системе отсчета шарик покоится, а сама система является неинерциальной. Поэтому на шарик, кроме сил тяжести и реакции стержня действует также центробежная сила инерции Fцб = = mω2R. Здесь R – вектор, направленный к шарику от центра окружности, описываемой шариком (рис. 8.13).
Рассмотрим потенциальную энергию |
//////////////// |
|
||
шарика. Она складывается из потенциаль- |
|
|||
|
|
ω |
||
ной энергии шарика в поле сил тяжести (от- |
N |
θ |
||
считываем высоту от уровня точки подвеса |
|
|
||
|
l |
|
|
|
нити) |
|
|
|
|
mgh = – mglcosθ
и потенциальной энергии шарика в поле центробежной силы:
mω2 R2 . 2
Поскольку в нашем случае R = l sin θ, то полная потенциальная энергия шарика равна:
U = −mgl cos θ− mω2l2 sin2 θ. 2
m • R
Fцб
mg
Рис. 8.13
(1)
Так как шарик в выбранной нами системе отсчета покоится, то это означает, что положение, в котором он находится, соответствует экстремуму потенциальной энергии. Причем этот экстремум должен быть минимумом потенциальной энергии, если положение равновесия устойчиво. Итак, задача сводится к нахождению угла θ, соответствующего минимуму потенциальной энергии.
Продифференцируем потенциальную энергию по углу θ и приравняем производную нулю:
mgl sin θ− 2 mω2l2 sin θcos θ = 0. 2
Переписав это уравнение в виде sin θ(g −ω2l cosθ)= 0 , получаем уравнения для θ:
sin θ = 0,
cos θ = ωg .
2l
135
Нетрудно понять, что из двух решений только одно может соответствовать минимуму потенциальной энергии. Для выбора этого
решения необходимо найти вторую производную d2U/dθ2: |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
d 2U |
= mgl cos θ− 2 |
mω2l2 cos 2θ |
. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
dθ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
В точке минимума U эта величина должна быть положительной. |
||||||||||||||||||||||||||||||||||||||||||||
|
Пусть sin θ = 0, тогда |
= mgl 1 − |
ω2l . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
d 2U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dθ |
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Эта величина больше нуля, если выражение в скобках положи- |
||||||||||||||||||||||||||||||||||||||||||||
тельно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1 − |
ω2l |
> 0 |
|
или |
|
|
ω< |
|
|
g |
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Итак, шарик висит вертикально, пока угловая скорость враще- |
||||||||||||||||||||||||||||||||||||||||||||
ния ω мала. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Пусть теперь cos θ = |
g |
, что возможно, если ω > |
g |
|
. |
|
Тогда |
|||||||||||||||||||||||||||||||||||||
ω2l |
l |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
d 2U |
|
|
|
|
|
|
ω2l cos 2θ |
|
|
|
|
|
|
|
|
g |
|
|
ω2l |
cos |
2 |
|
|
|
|
|
2 |
θ |
|
|||||||||||||||
|
|
|
|
= mgl cosθ− |
|
|
|
|
|
|
|
|
= mgl |
|
− |
|
|
|
θ−sin |
|
= |
||||||||||||||||||||||||
|
dθ |
2 |
|
|
|
|
g |
|
|
|
2 |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω l |
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
g |
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
g |
2 |
|
|
|
||||||||||||
|
|
|
|
g |
|
|
ω l |
|
|
|
|
|
|
|
|
|
|
|
|
ω l |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
= mgl |
|
|
− |
|
|
|
2 |
|
|
|
|
|
|
|
−1 |
|
|
= mgl |
|
|
1 |
− |
|
|
|
|
. |
|
|||||||||||||
|
|
|
|
2 |
|
|
g |
|
2 |
|
|
|
|
|
g |
2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
ω l |
|
|
|
|
ω l |
|
|
|
|
|
|
|
|
|
|
|
|
|
ω l |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае ω > |
|
g |
|
, как видим |
|
|
d 2U |
|
> 0 . Окончательно получаем |
|||||||||||||||||||||||||||||||||||
|
|
l |
|
|
|
|
d θ2 |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
θ = 0, |
|
|
ω< |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
cos θ = |
|
|
|
|
, |
ω > |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Интересно проследить за тем как при увеличении ω происходит переход стержня из вертикального положения с θ = 0 в наклонное, когда cos θ = g/ω2l. Для этого изобразим графики потенциальной энергии как функции угла θ при различных значениях ω.
136

Зависимость U от θ дается соотно- |
U |
|
|
|
|||
шением (1). Положим сначала ω = 0. То- |
|
|
|
|
|||
гда U(θ) = –mglcosθ. Эта функция имеет |
0 |
|
π/2 |
θ |
|||
минимум в точке θ = 0 и изображается |
1 |
||||||
|
|||||||
кривой 1 на рис. 8.14. |
угловую |
|
2 |
|
|
||
Если теперь |
увеличивать |
-mgl |
3 |
|
|
||
скорость вращения ω, то график U(θ) бу- |
|
|
|
||||
дет изменяться. Эти изменения сводятся к |
|
Кривая 1: ω = 0 |
|
|
|||
тому, что график будет опускаться, по- |
|
Кривая 2: ω2 < g/l |
|
||||
скольку с ростом ω растет по |
модулю |
|
Кривая 3: ω2 > g/l |
|
|||
|
|
|
|
||||
второе слагаемое |
в (1). Однако пока |
|
Рис. 8.14 |
|
|
||
ω2<g/l, общий вид графика будет напоминать кривую 1 на рис. 8.13 в том отношении, что график будет по-прежнему монотонно возрастающим с минимумом в точке θ = 0 (кривая 2 на рис. 8.14).
Ситуация меняется как только ω2 делается больше g/l. В этом случае U(θ) в точке θ = 0 имеет уже не минимум, а максимум и при
малых углах U(θ) оказывается отрицательной. |
|
|
|
|
|
||||||||
Действительно, при θ << l можно принять: |
|
|
|
|
|
||||||||
|
cosθ ≈1 – |
θ2 |
, |
|
sinθ ≈ θ. |
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Тогда U(θ) можем записать при малых θ в следующем виде: |
|||||||||||||
U (θ) ≈ −mgl 1 |
− θ2 |
+ ω2l |
θ2 |
|
≈ −mgl 1 − |
1 − |
ω2l |
θ2 |
. |
||||
|
2 |
|
2g |
|
|
|
|
|
g |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Как следует из полученного выражения при θ = 0 потенциальная энергия U(θ) имеет минимум пока ω2<g/l, который сменяется на максимум при ω2>g/l.
График U (θ) при ω2>g/l изображен кривой 3 на рис. 8.14. Произведенный нами анализ показывает, что вертикальное по-
ложение стержня, т.е. θ = 0 оказывается неустойчивым при ω2>g/l и стержень переходит в новое положение равновесия, в котором он
отклонен на угол θ = arccos |
g |
. |
2 |
||
|
ω l |
|
График зависимости θ от ω изображен на рис. 8.15.
Постройте с этот график самостоятельно. В частности проверьте, что в точке, где ω2 = g/l касательная к графику вертикальна.
137

θ |
|
|
Ситуации, |
подобные |
рассмот- |
||||
π/2 |
|
|
ренной, когда некоторая динамиче- |
||||||
|
|
ская система переходит из одного |
|||||||
|
|
|
|||||||
|
|
|
устойчивого |
состояния |
в |
другое |
|||
|
|
|
при изменении каких-либо |
пара- |
|||||
0 |
|
ω |
метров, определяющих |
состояние |
|||||
g |
|
этой системы, в физике встречают- |
|||||||
|
|||||||||
|
ся часто. Значения параметров, при |
||||||||
|
l |
||||||||
|
которых |
происходит |
переход, на- |
||||||
|
Рис. 8.15 |
||||||||
|
зываются |
точками |
бифуркации |
||||||
|
|
|
|||||||
системы, В нашем случае точкой бифуркации является значение
угловой скорости ω = |
g |
. |
|
||
|
l |
|
Задача 8.7. Суточное вращение Земли вокруг своей оси приводит к тому, что Земля оказывается слегка сплющенной с полюсов, т.е. расстояние между её полюсами несколько меньше, чем диаметр Земли в экваториальной плоскости. Найти разность экваториального и полярного радиусов Земли.
Решение. Вопросом о форме Земли интересовались многие учёные, в том числе и Ньютон. Рассмотрим решение, предложенное Ньютоном. Будем считать, что форма Земли очень мало отличается от шарообразной (потом мы убедимся в справедливости этого предположения). Мысленно просверлим от поверхности Земли до её центра два канала: один от полюса к центру, а второй от экватора к центру. Заполним эти каналы доверху жидкостью, например, водой. Тогда давление в обоих каналах в центре Земли будет одинаковым. Вычисление давления без учёта вращения Земли было проделано в задаче 2.8 (законы Ньютона). Этот же результат годится для канала, заполненного водой и идущего от полюса к центру Земли:
p = |
ρ' gRполюс |
. |
(1) |
|
2 |
||||
|
|
|
||
Здесь Rполюс – полярный радиус Земли, |
ρ' – плотность воды. |
|||
Для канала, идущего к центру Земли от экватора, необходимо учесть ещё центробежную силу, которая несколько ослабляет действие силы тяжести. Воспользуемся полученными в этой задаче уравнениями, добавив в них центробежную силу:
138
|
|
|
|
p(r) − p(r +dr) = dFпритяж − Fцб. |
|
|
|
(2) |
||||||||||
Сила тяготения согласно упомянутой задаче равна |
|
|
|
|
||||||||||||||
|
|
|
|
dF |
= G |
4π |
ρr dm |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||
(ρ – плотность Земли, dm =ρ'dr), а центробежная сила |
|
|
|
|
||||||||||||||
|
|
|
|
Fцб = dm ω2r. |
|
|
|
|
|
|
|
|
||||||
Тем самым, уравнение (2) приобретает вид: |
|
|
|
|
|
|||||||||||||
|
|
4π |
|
2 |
|
|
|
|
4π |
|
|
2 |
|
|
||||
dp = −G |
|
|
ρρ'r dr +ρ'ω rdr = − |
G |
|
ρρ'−ρ'ω |
|
rdr . |
|
|||||||||
3 |
|
3 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Интегрируя по dr от нуля до Rэкват, получим |
|
|
|
|
|
|||||||||||||
|
4π |
|
|
R2 |
|
ρ' gR |
|
|
ρ'ω2 R2 |
|
||||||||
p = G |
|
|
ρρ'−ρ'ω2 |
экват |
= p = |
|
|
экват |
− |
|
|
экват |
. |
(3) |
||||
|
3 |
|
|
|
|
|
2 |
|||||||||||
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|||
Приравнивая (1) и (3), получим: |
|
|
|
|
||
gR |
|
= gR |
|
−ω2R2 |
, |
|
полюс |
экват |
экват |
|
|||
R |
− R |
= |
ω2Rэкват2 |
. |
|
|
экват |
|
полюс |
|
g |
|
|
|
|
|
|
|
||
Экваториальный радиус в правой части заменим средним радиусом Земли и тогда окончательно получим:
R |
− R |
= ω2 R2 |
≈ |
0,732 10−8 6,42 1012 |
≈ 21,8 км. |
|
|||||
экват |
полюс |
g |
10 |
|
|
|
|
|
|||
Наш результат показывает, что исходное предположение о слабом искажении формы Земли под действием центробежной силы оказалось верным. Действительно, по данным, приведенным в справочнике К.У. Аллена "Астрофизические величины", экваториальный радиус Земли равен 6378,164±0,003 км, а полярный радиус составляет 6356,779 км. Их разность 21,385 км прекрасно согласуется с нашим результатом.
Полученный результат даёт лишь ответ на вопрос о том, каково различие полярного и экваториального радиусов Земли. Для ответа на вопрос о форме Земли пришлось бы составлять и решать значительно более сложные уравнения.
139