

Усі лекції
.pdfВиди супутникових вимірювань.
Класифікація похибок вимірювань.
Методи GNSS спостережень.
В основі супутникової геодезії лежить використання віддалених від Землі об’єктів, якими є штучні супутники Землі (ШСЗ), а з моменту встановлення на Місяці призмових відбивачів – і Місяць. Навколо Землі обертається декілька тисяч ШСЗ. Частина з них знаходиться в активному режимі, решта уже відпрацювали свій ресурс.
Глобальна супутникова навігаційна система (GNSS) - це загальний термін, що описує будь-яке супутникове сузір'я, яке надає послуги визначення місцезнаходження, навігації та синхронізації - positioning, navigation, and timing (PNT) на глобальній або регіональній основі.
Незважаючи на те, що GPS є найбільш поширеним ГНСС, інші країни випускають свої власні системи для надання додаткової, незалежної можливості PNT
Системи позиціювання за сигналами глобальних навігаційних супутникових систем (ГНСС) знаходять все більше застосування в різних галузях діяльності і значною мірою зумовлюють прогрес суспільства. Особливе місце серед них займають системи високоточного позиціонування взаємного положення об'єктів по фазовим вимірюванням навігаційних сигналів.
Вони забезпечують найбільш високу точність і знаходять застосування в наступних сферах:
·Високоточний моніторинг зсувів і коливань конструкцій інженерних споруд (мостів, гребель, веж, висотних і великогабаритних будівель та інших складних інженерних споруд);
·Контроль зміщень земної поверхні в сейсмонебезпечних зонах, районах вічної мерзлоти, на зсувонебезпечних ділянках і т.п .;
·Геодезичне забезпечення територіального планування, розмітки земельних ділянок, доріг
іт.п .;
·Інформаційне забезпечення диспетчерського управління залізничним транспортом при маневруванні на станціях;
·Інформаційна підтримка систем управління рухом автотранспорту без водіїв (кар'єри, точкове землеробство і т.п.);
·Інформаційне забезпечення сліпої посадки літаків (в тому числі на авіаносець).
Коротка історична довідка.
В кінці 1960-х років були створені низькоорбітальні супутникові радіонавігаційні системи "Цикада" (СРСР) і «Транзит» (США). Успішний досвід їх експлуатації підтвердив перспективність супутникового радіонавігації як основної лінії розвитку радіонавігації в цілому.
ГНСС в тому вигляді, в якому вони існують і використовуються зараз, зародилися на початку 1970-х років, коли Радянський Союз і США практично в один час почали розробку глобальних навігаційних супутникових систем ГЛОНАСС і GPS. В даний час кожна з цих систем має на орбіті повноцінну орбітальне угруповання навігаційних космічних апаратів, які забезпечують надання послуг в глобальному масштабі.
Будова GPS і ГЛОНАСС
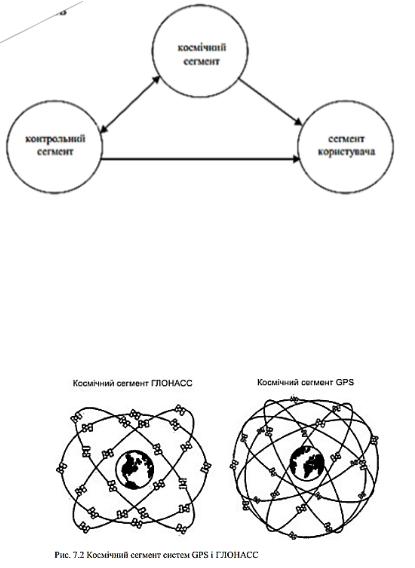
Системи GPS і ГЛОНАСС мають подібну архітектуру та принципи дії і складаються з 3 сегментів:
1. Космічного сегменту, який складається з штучних супутників Землі, що передають радіосигнали на Землю;
2. Контрольного сегменту, який стежить за функціонуванням всієї системи;
3.Сегменту користувача, який включає приймачі різних типів
Кожен із сегментів виконує дуже важливі функції і чітка робота ГНСС можлива лише при правильній роботі та
взаємодії всіх сегментів. Космічний сегмент
Космічний сегмент ГНСС — це вся сукупність ШСЗ.
В системі GPS космічний сегмент GPS являє собою систему з 24 ШСЗ, розподілених по шести майже колових орбітах (з ексцентриситетом f<0,01) з висотою біля 20200 км. Існують п'ять класів супутників GPS: Block I, Block II, Block НА, Block IIR, Block IIF. Середня кутова відстань між вузлами орбіт супутників 60°, нахил орбіт до площини екватора 55°. ШСЗ обертаються навколо Землі як одне ціле, не змінюючи своїх взаємних положень. Період обертання супутників близько 12 годин.
Проектний космічний сегмент системи ГЛОНАСС складається з 24 супутників, що рухаються на 3 орбітах (рис.7.2). Основні параметри космічних сегментів систем GPS і ГЛОНАСС представлені у таблиці 7.1.
Кожен супутник системи GPS випромінює радіосигнали на робочих частотах L1=1575,42 МГц і L2=1227,60 МГц. Сигнал на частоті Li модульовано Р, С/А—кодами, а на частоті L2 — виключно Р-кодом.
Код вільного доступу С/А (Coarse Acquisition) мас частоту проходження імпульсів 1,023 МГц і період повторення 0,001 сек. Точність автономних вимірів відстаней від приймача до супутника за допомогою цього коду є невисокою.
Таблиця 7.1 Основні характеристики супутникових навігаційних систем GPS і ГЛОНАСС
Показник |
GPS |
ГЛОНАСС |
|
|
|
Сузір'я супутників |
|
|
|
|
|
Кількість супутників |
24(31*) |
24(18**) |
|
|
|
Число орбітальних площин |
6 |
3 |
|
|
|
Кількість |
супутників у |
кожній |
4 |
8 |
площині |
|
|
|
|
Висота орбіти, км |
|
20 300 |
19 100 |
|
|
|
|
|
|
Кут нахилу орбіти, ° |
|
55 |
64,8 |
|
|
|
|
|
|
Період |
обертання |
супутника |
12 |
11,26 |
навколо Землі год. |
|
|
|
|
Супутники |
|
|
|
|
|
|
|
|
|
Маса КА, кг |
|
1055 |
дані відсутні |
|
Потужність сонячних батарей, Вт |
450 |
дані відсутні |
||
Термін експлуатації, роки |
|
7.5 |
2-3 |
|
|
|
|
|
|
*в системі GPS для покращення роботи в умовах міської забудови (при наявності значної кількості перешкод) було вирішено збільшити кількість супутників до 36 — на даний час на орбіті присутні 31 робочий супутник
**в системі ГЛОНАСС в середині 90-х кількість супутників різко зменшилась (був момент, коли лишилось З робочі супутники). Проте в останні роки їхня кількість зросла. Так
в2005р. їх вже було 9. За офіційними даними МО РФ на даний час на орбіті 18 діючих супутників, хоча реально значно менше.
Захищений код Р (Protected) характеризується частотою проходження імпульсів 10,23 МГц і періодом повторення 7 діб. Американське оборонне відомство вжило заходів додаткового захисту Р-коду: у будь-який момент без попередження може бути включений режим AS (Anti Spoolmiz). При цьому виконується додаткове кодування Р-коду, і він перетворюється в Y-код. Розшифровка Y-коду можлива тільки апаратно, з використанням спеціальної мікросхеми, що встановлюється в GPSприймачах військового призначення.
З метою зниження точності визначення координат несанкціонованими користувачами передбачений так називаний "режим вибіркового доступу" SA (Selective Availability). При включенні цього режиму в навігаційне повідомлення навмисно вводиться помилкова інформація про похибки атомних годинників і елементи орбіти супутників, що приводить до суттєвого зниження точності навігаційних визначень.
Основу точності системи становлять атомні годинники або стандарти точного часу. Супутники типу Block II обладнані чотирма стандартами точного часу: двома рубідієвими та двома цезієвими. Довгострокова відносна стабільність частоти цих стандартів становить 10" і 10" . Високоточні стандарти частоти, які можна назвати серцем усієї електронної системи, застосовуються для генерації коливань на робочій частоті 10,23 МГц. Шляхом множення цієї частоти на 154 та 120 відповідно отримують дві частоти L1 і L-2. Двохчастотний характер сигналу важливий для усунення похибки під час визначення псевдовідстані, яка виникає через вплив іоносфери.
Варто зауважити, що існують приймачі, які здатні вловлювати і розшифровувати сигнали обох систем — GPS та ГЛОНАСС. Завдяки цьому вони швидше визначають координати точок з необхідною точністю.
Контрольний сегмент, або сегмент управління ГНСС — це комплекс наземних засобів, які забезпечують функціонування космічного сегмента, контролюють його роботу та здійснюють безпосереднє керування всією системою.
Цей сегмент в системі GPS включає контрольно-спостережувальні станції - головну і додаткові станції безперервного спостереження за ШСЗ. Головним завданням цих станцій є спостереження за супутниками з метою визначення траєкторій ШСЗ та похибок бортових атомних годинників. Крім того, через систему управління здійснюються синхронізація годинників та оновлення даних. В склад системи контрольних станцій входять:
—головна контрольна станція;
—п'ять станцій стеження (моніторингових);
—три контрольних станції.
Місцем базування головної станції є об'єднаний космічний Центр управління на авіабазі Фалькон, Колорадо-Спрінгз (США). В цьому центрі збираються результати спостережень з усіх станцій спостережень, обчислюються уточнені орбіти навігаційних супутників та оцінюється стан кожного з них і системи в цілому.
Станції спостереження розташовані в місті Колорадо-Спрінгз та на островах Гаваї, Вознесіння, Дієго-Гарсія. Кваджалейн (рис.7.3). Станції обладнані цезієвими стандартами частоти і часу та Р-кодовими приймачами і можуть одночасно відслідковувати до 11 супутників. Положення станцій відоме з високою точністю в геоцентричній системі координат WGS-84. На станціях кожні півтори секунди вимірюють псевдовідстані до всіх ШСЗ NAVSTAR, коли ті проходять над горизонтом, визначають вплив атмосфери і
пересилають |
на |
головну |
станцію |
згладжені, |
виправлені за |
іоносферну і |
тропосферну рефракції |
дані, усереднені за 15хв. |
|
Сегмент користувача
Сегмент користувачів являє собою всю множину GPS-приймачів. Приймачі мають різну будову, функції та призначення, тому їх розрізняють за різними ознаками.
Оскільки власником системи GPS є МО США, то в першу чергу приймачі поділяються на дві групи:
-PPS (Precise Positioning Service) — для точного визначення місцеположення. До цієї групи відносяться військові користувачі NATO, приймачі яких здатні приймати Y- код позбавлений AS та SA - кодування.
-SPS (Standard Positioning Service) — для стандартного визначення місцеположення. До другої групи відносяться усі цивільні користувачі, приймачі яких приймають сигнали, кодовані функціями AS та SA.
У залежності від призначення приймачі розділять на три групи:
-навігаційні. Приймачі цієї групи миттєво визначають своє місцеположення. Середня квадратична похибка визначення координат навігаційними приймачами при відсутності перешкод та виключеному SA — кодуванні супутникових сигналів не перевищує 10 м, а при включеному SA — кодуванні може досягати 200-300 м.
-геодезичні. Ці приймачі призначенні для диференційних вимірів (одночасно виміри проводяться мінімум двома приймачами) і визначення приростів координат між статично закріпленими приймачами. Точність визначення приростів координат може сягати 1 мм.
-спеціальні. Вони можуть мати саме різноманітне призначення, зокрема, визначення точного часу.
В залежності від принципу вимірювання віддалей до супутника приймачі поділяються на кодові та фазові. Деякі приймачі додатково вимірюють доплерівський зсув частоти сигналу.
Приймачі також розділяють на чотири групи за принципом вимірювання віддалей до супутника і типу сигналу, який приймається до опрацювання. Це:
-кодові приймачі;
-фазові приймачі із СІA — кодом;
-кодові приймачі із СІA та Р — кодом;
-фазові приймачі із СІA та Р— кодом.
Найчастіше цей поділ спрощують і ділять приймачі на одночастотні (приймають С/А- код), та двочастотні (приймають СІA та Р— код).
GPS — приймач складається з шести головних блоків (рис.7.5).
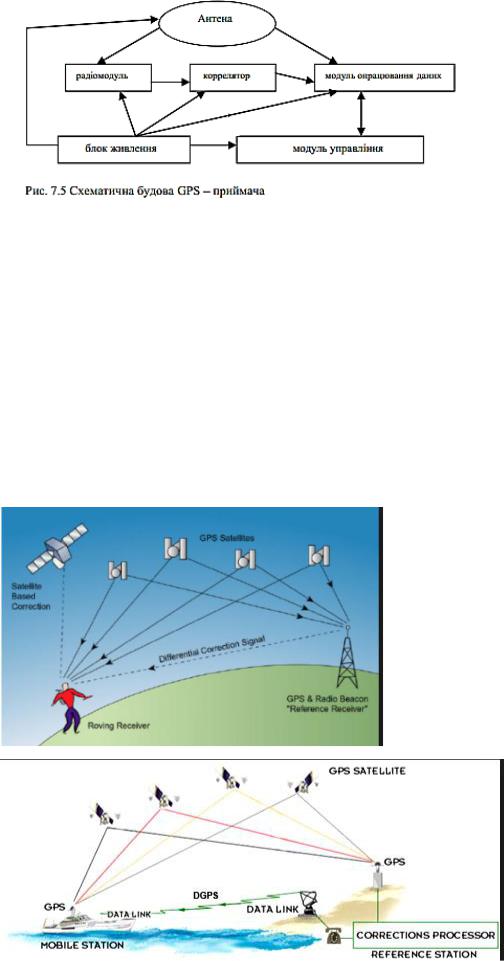
Антена приймає GPS-сигнали і передає у радіомодуль. У цьому модулі виконується підсилення сигналів і їх конвертації на низькі частоти. Корелятор призначений для синхронізації затримки і фази сигналу приймача із параметрами прийнятого радіомодулем GPS-сигналу. Сигнали всіх GPS-супутників опрацьовуються одночасно по окремих каналах. На вихід корелятора подаються дані, необхідні для пошуку і визначення супутникового сигналу, здійснення приблизних обчислень і визначення місцеположення приймача. Модуль опрацювання даних виконує алгоритмічним шляхом опрацювання прийнятих сигналів, а також оцінює параметри супутникового сигналу, розраховує місцеположення приймача. Через модуль управління приймачем оператор задає відповідні режими роботи приймача, контролює процес вимірів і їх накопичення у пам'яті приймача.
Крім системи ГЛОНАСС і GPS, роботи з розгортання глобальних навігаційних супутникових систем проводять Китай - система Бейдоу, і країни Європейського союзу - система ГАЛІЛЕО. Японія та Індія розгортають регіональні навігаційні супутникові системи QZSS і NavIC відповідно.
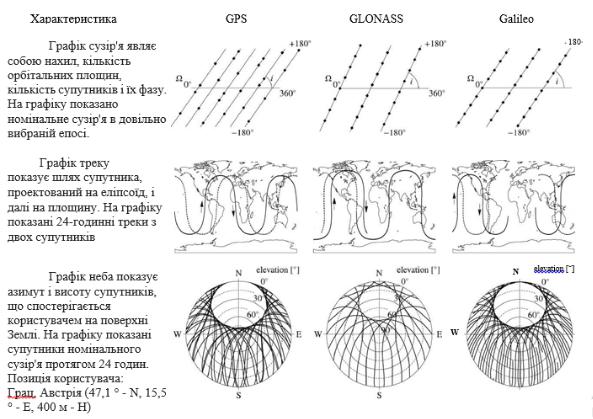
Сучасна супутникова навігація ґрунтується на використанні віддалемірних вимірювань між навігаційними супутниками і споживачем. Це означає, що споживачеві передається в складі навігаційного сигналу інформація про координати супутників. Одночасно (синхронно) проводяться вимірювання віддалей до навігаційних супутників. Спосіб вимірювань віддалей ґрунтується на обчисленні тимчасових затримок сигналу від супутника в порівнянні з сигналом, що генерується апаратурою споживача.
На рисунку приведена схема визначень місцеположення споживача з координатами x, y, z на основі вимірів віддалі до чотирьох навігаційних супутників. Кольоровими яскравими лініями показані кола, в центрі яких розташовані супутники. Радіуси кіл відповідають істинним відстаням між супутниками і споживачем. Кольорові неяскраві лінії - це кола з радіусами, що відповідають виміряним відстаням, які відрізняються від справжніх і тому
називаються псевдо.
Справжня відстань відрізняється від псевдо на величину, що дорівнює добутку швидкості світла зсув годинника b, тобто величину зміщення годин споживача по відношенню до системного часу.
На малюнку показаний випадок, коли годинник споживача випереджають
системний час, тому виміряні псевдовіддалі менше справжніх відстаней.
Системи координат
Для функціонування навігаційних супутникових систем необхідні дані про параметри обертання Землі, фундаментальні ефемериди Місяця і планет, дані про гравітаційне поле Землі, про моделях атмосфери, а також високоточні дані про використовувані системах координат і часу.
Геоцентричні системи координат - системи координат, початок яких збігається з центром мас Землі. Їх також називають загальземного або глобальними.
Для побудови та підтримки загальноземної систем координат використовуються чотири основні методи космічної геодезії:

радіоінтерферометрія з наддовгою базою (РНДБ),
лазерна локація космічних апаратів (SLR),
доплерівські вимірювальні системи (DORIS),
навігаційні вимірювання космічних апаратів ГЛОНАСС і інших ГНСС.
Міжнародна земна система координат ITRF є еталоном земної системи координат.
В сучасних навігаційних супутникових системах використовуються різні, як правило національні, системи координат.
Сучасні глобальні супутникові системи
В даний час існує ряд світових супутникових навігаційних систем GNSS (Global Navigation Satellite System): американська NAVSTAR/GPS (NAVigatіon System with Time And Ranging; Global Positioning System); російська ГЛОНАСС (Глобальна Навігаційна Супутникова Система – ГНСС); європейська супутникова система Галілео; китайська навігаційна система Бейдоу; японська регіональна навігаційна система QZSS тощо
На даний час близько 200 організацій, що займаються збором GNSS даних з базових станцій по всьому світу, об’єднані в IGS (International GNSS Service), яка, в свою чергу, входить до Міжнародної асоціації геодезії.
Система GPS
Розробка концепції побудови і архітектури GPS зайняла приблизно 5 років, і вже в 1974 році фірма Rockwell отримала замовлення на виготовлення перших восьми космічних апаратів (КА) Block I для створення демонстраційної системи. Перший КА був запущений 22 лютого 1978, і в тому ж році Rockwell отримала контракт на створення ще чотирьох КА. Спочатку передбачалося, що орбітальне угруповання GPS налічуватиме 24 КА в трьох орбітальних площинах висотою 20200 км і нахилом 63°. До моменту початку серійного виробництва в 1989 році космічних апаратів модифікації Block II було прийнято рішення про зміну параметрів орбіти GPS, зокрема, нахил було змінено на 55°, а кількість орбітальних площин збільшено до
6.
Виділяють два важливих етапи розгортання системи GPS - фазу початкової працездатності (IOC) і фазу повної працездатності (FOC). Етап IOC почався в 1993 році, коли в складі орбітального угрупування налічувалося 24 КА різних модифікацій (Block I / II / IIA), готових до використання за цільовим призначенням. Перехід в режим FOC відбувся в липні 1995, після завершення всіх льотних випробувань, хоча фактично система почала надавати послуги в повному обсязі з березня 1994 року. Таким чином, GPS є повністю працездатною вже протягом більш ніж двох десятиліть, при цьому протягом усієї своєї історії GPS постійно модернізувалася з метою задоволення вимог різних категорій як цивільних, так і військових споживачів.
При проектуванні GPS передбачалося, що точність навігаційних визначень при використанні C / A-коду буде в межах 400 м. Реальна точність вимірів по C / A-коду виявилася в 10 і більше разів вище - 15-40 м (СКП) за координатами і частки метра в секунду за швидкістю. Можливість отримання такої точності вимірювань за допомогою нескладної комерційної АП викликала в США побоювання, що сигнали GPS можуть бути використані потенційним противником, в тому числі в системах високоточної зброї. Як захисний засіб, починаючи з космічного апарату Block II, в GPS були реалізовані два методу навмисної деградації (загрубления) точності навігаційно-часового забезпечення цивільних споживачів - селективний доступ і одночасно вжиті заходи щодо захисту від так званих відводять перешкод. Деактивация режиму селективного доступу була здійснена 2 травня 2000 р близько 4:00 (UT).
Точність автономної навігації зросла майже в 10 разів, що дало гігантський імпульс до розвитку прикладних навігаційних технологій.
Поточний третій етап модернізації GPS передбачає розробку і виробництво космічних апаратів наступного покоління Block III, які в поєднанні з вдосконаленим наземним комплексом управління та навігаційною апаратурою споживачів забезпечать поліпшені характеристики в частині перешкодозахищеності, точності, доступності та цілісності координатно-часового та навігаційного забезпечення.
Система GLONASS
Вперше пропозицію по використанню супутників для навігації було зроблено проф. В.С. Шебшаевічем в 1957р. Ця можливість була відкрита їм при дослідженні додатків радіоастрономічних методів в самолетовождении. Дані дослідження були використані в 1963р. при дослідно-конструкторських роботах над першою вітчизняною низькоорбітального системою "Цикада".
У 1967р. був виведений на орбіту перший навігаційний вітчизняний супутник "Космос192". Система "Цикада" була здана в експлуатацію в складі чотирьох супутників в 1979 р
Після 2008 року споживачі космічних навігаційних систем «Цикада» та «Цикада-М» були переведені на обслуговування ГЛОНАСС, і експлуатація цих систем була припинена. Льотні випробування високоорбітальних навігаційних системи, що отримала назву ГЛОНАСС, були розпочаті в жовтні 1982 р запуском супутника "Космос-1413". Система ГЛОНАСС була прийнята в дослідну експлуатацію в 1993 р. У 1995 р розгорнута орбітальне угруповання повного складу (24 КА «Глонасс» першого покоління) і розпочато штатна експлуатація системи.
Beidou-2 / Compass
Ідея створення китайської національної регіональної навігаційної системи була запропонована в 1983 році. Концепція системи, що використовує два геостаціонарних космічних апарати (робоча назва системи Twinsat), пройшла експериментальну перевірку в 1989 р Експеримент проводився на базі двох зв'язкових космічних апаратів DFH-2 / 2A, вже знаходилися на орбіті.
Перший етап створення системи Бейдоу (Beidou - Північний Ківш - китайська назва сузір'я Великої Ведмедиці) було розпочато в 1994 році. У 2000 році було запущено два геостаціонарних супутника: космічний апарат (КА) Beidou-1A (30 жовтня 2000) і Beidou-1B (20 грудня 2000). Апарати системи Beidou-1 побудовані на базі зв'язковий геостаціонарній платформи DFH-3. 15 грудня 2003 китайська система Бейдоу першого покоління була здана в експлуатацію. Запуск третього геостационарного супутника Beidou-1C в 2003 році поліпшив експлуатаційні характеристики системи.
Розвиток системи Бейдоу другого покоління Бейдоу-2 почалося в 2004 році. До кінця 2012 року було запущено ще 14 супутників (5 геостаціонарних супутників, 5 супутників на похилій геосинхронной орбіті (ГСНО) і 4 супутника на середніх орбітах), що дозволило завершити розгортання орбітального угрупування. Бейдоу-2 була розроблена за принципом сумісності з Бейдоу-1, із застосуванням схеми пасивного позиціонування, що дозволяло їй забезпечувати користувачів в країнах Азіатсько-тихоокеанського регіону послугами визначення місця розташування, швидкості, часу, широкодіапазонних диференціальних поправок і відправки коротких повідомлень.
Третій етап - це створення системи третього покоління Бейдоу-3, розпочато в 2009 році. Основною метою є забезпечення до 2018 року основних послуг для користувачів, що знаходяться на території та акваторії обох Шовкових шляхів (сухопутного і водного), а також сусідніх регіонів, і завершення розгортання орбітального угрупування з 35 КА, призначеної для забезпечення послугами користувачів глобально до 2020 року.

Система Galileo
Глобальна навігаційна супутникова система Galileo створюється Європейським Союзом для забезпечення незалежності країн членів в сфері координатно-часового та навігаційного забезпечення. Європейська програма зі створення ГНСС офіційно була затверджена в 1994, коли Європейська Рада зажадав від Європейської комісії вжити заходів щодо розвитку інформаційних технологій, включаючи і супутникову навігацію. Було прийнято рішення розвивати два напрямки. Перше з них - створення систем функціональних доповнень існуючих ГНСС GPS і ГЛОНАСС. Ця програма отримала назву European Geostationary Navigation Overlay Service (EGNOS). Другий напрямок полягало в створенні власної ГНСС, призначеної для цивільного застосування і побудованої на принципах державно-приватного партнерства. У 1999 Європейський проект по створенню ГНСС отримав умовну назву ГАЛІЛЕО на честь італійського астронома Галілео Галілея.
Експериментальні супутники GIOVE-A і GIOVE-В були запущені на орбіту 28 грудня 2005 і 27 квітня 2008 відповідно. Основне завдання GIOVE-A полягала в оцінці точностних характеристик навігаційних радіосигналів ГАЛІЛЕО у всіх частотних діапазонах, а GIOVE-В - в тестуванні навігаційної корисного навантаження. Два перших навігаційних космічних апарати (КА) були запущені 20 жовтня 2011 року з допомогою ракети «Союз-СТБ» з космодрому в Куру. Технологія виведення КА ГАЛІЛЕО передбачає групові запуски по два КА на російській ракеті-носії «Союз» і по чотири КА на європейській ракеті «Аріан-5».
Параметр |
GPS |
GLONASS |
Galileo |
Beidou |
|
|
|
|
|
Число супутників в системі |
24 |
24 |
27 |
27 |
Число орбітальних площин |
6 |
3 |
3 |
3 |
Нахил орбіти до площини |
55 |
64,8 |
56 |
55 |
екватора |
|
|
|
|
Середня висота орбіт |
20145 км |
19100 км |
23200 км |
21500 км |
|
||||
Період оберту супутників |
11 г 58 хв |
11 г 16 хв |
14 г 4 хв |
12 г 53 хв |
|
||||
Система координат |
WGS-84 |
ПЗ-90 |
GTRF |
CGCS |
|
||||
|
|
|
|
|
GPS |
GLONASS |
Galileo |
Beidou |
Сектор управління і контролю: станції стеження, служба точного часу, головна станцію з обчислювальним центром і станції завантаження інформації на супутники. В GPS п'ять станцій стеження розподілені рівномірно по земній кулі; одна з них суміщена з центральною управляючою станцією в Колорадо-Спрінгс (США). Отримана на цих станціях