

Усі лекції
.pdfі тих же супутників, тільки в цьому випадку можна розрахувати вектор між цими приймачами. При цьому якщо якийсь з приймачів знаходиться на пункті з відомими координатами, то можна точно визначити щодо нього координати інших приймачів в цій же системі координат.
Цей принцип відносних вимірювань поширюється на всі типи ГНСС зйомки, включаючи статику, де в процесі постобробки даних все одно відбувається послідовна передача координат від одного приймача до іншого за певними алгоритмами. Але найбільш яскраву роль опорного (або базового) приймача проявляється в кінематичних видах зйомки, коли один приймач стаціонарно розташований на відомій точці, а координати інших рухомих приймачів (роверів) визначаються щодо нього. Такий опорний приймач називається базовою станцією. Як випливає з вищесказаного, базові станції застосовуються практично у всіх додатках, в яких використовуються супутникові координатні визначення - інженерні вишукування, геодезичні роботи, картографія, ГІС, кадастрові роботи, будівництво доріг і складних інженерних споруд, системи управління будівельною технікою, системи точного землеробства, моніторинг деформацій інженерних об'єктів, навігація транспорту і т.п.
Зазвичай базовий приймач встановлюють на штатив над вихідною точкою, і він продовжує роботу до тих пір, поки разом з ним працюють ровери. Робота може виконуватися
врежимі кінематики з постобробки, коли координати роверів розраховуються згодом в офісі
врезультаті постобробки накопичених всіма приймачами результатів вимірювань. Робота також може здійснюватися в режимі кінематики в реальному часі (RTK), коли базовий приймач по каналу зв'язку (радіо або GSM/GPRS) передає якусь інформацію (поправки) на ровери, а ровери за допомогою цієї інформації обчислюють свої поточні координати. В обох випадках такий базовий приймач називають ще польовою базовою станцією, так як він встановлюється в полі в районі робіт тільки на період виконання вимірювань роверами.
Мережа базових станцій
Компанії (напр «Геотераса», ЗАКПОС, "ТНТ ТПІ" ) активно розвивають інфраструктуру постійно діючих (або референцних) базових станцій на території України. Їх принципова відмінність від польових базових станцій полягає в тому, що референцні станції монтуються стаціонарно і працюють цілодобово, забезпечуючи в зоні своєї дії роботу необмеженого числа ГНСС приймачів.
Слід зазначити, що до вибору місця розташування постійно діючих станцій пред'являються певні вимоги. Насамперед, антена базового приймача розташовується в місці з відсутністю перешкод для поширення супутникових сигналів - домінуючих будівель, інженерних конструкцій, джерел сильного електромагнітного випромінювання, поверхонь, що призводять до відбиття супутникового сигналу. Крім того, антена надійно фіксується і займає незмінне положення в процесі вимірювань. Власне приймач розміщаємо в добре захищеному місці (у спеціальній металевій шафі, або всередині приміщення що охороняється), де є доступ до стабільного джерела живлення та ліній зв'язку (Інтернет). Найчастіше, для установки таких станцій ми використовуємо капітальні будови, в тому числі, адміністративні та офісні будівлі, оскільки в більшості випадків вони задовольняють технічні потреби.

Всі базові станції мережі зв'язані з центральним обчислювальним центром компанії (напр. Геотераса) за допомогою ліній зв'язку мережі Інтернет. Завдяки цьому інформація, отримана ГНСС приймачами базових станцій в режимі реального часу, постійно надходить до обчислювального центру та обробляється спеціалізованим програмним забезпеченням.
Базові станції обладнані сучасними, багатоканальними мультисистемними приймачами які отримують дані від таких сузір'їв супутникових систем як GPS та ГЛОНАСС.
Кожна станція оснащена блоком безперебійного живлення, який здатен забезпечити роботу обладнання у разі аварійних ситуацій з електропостачання на протязі 24 годин, а також на більшості станцій підключено декілька каналів мережі Інтернет. Таке оснащення станцій обумовлено необхідністю безупинного надання інформації користувачу у будь який час і мережа максимально надійно виконує свої функції.
Особливу увагу необхідно звернути і на оснащення обчислювального центру, який в режимі реального часу постійно займається обробкою отриманих даних та наданням вихідних матеріалів користувачу мережі. Це сучасне багатопроцесорне обладнання, розташоване у великому дата-центрі, який має безліч каналів зв'язку Інтернет та повністю забезпечений автономним живленням на випадок аварійних ситуацій. При цьому всіма обчислювальними процесами керує надійне мережеве програмне забезпечення.
Основні переваги використання
Спрощення логістики польових робіт. Більше не потрібно встановлювати польову базову станцію і залишати персонал на її обслуговування, в тому числі, охорону. Скорочується кількість польових бригад, які потрібно транспортувати до місця робіт і назад. Простіше планувати час на виконання робіт, оскільки дані з постійно діючої базової станції доступні цілодобово.
Економія ресурсів. Потрібна менша кількість польового персоналу, транспорту, ГНСС обладнання для виконання того ж обсягу робіт. Резервувати обладнання для використання як польових базових станцій більше не буде потрібно, а вже наявні супутникові приймачі можна використовувати більш ефективно, оптимізуючи інвестиції на придбання нового обладнання.
Гарантія точності результатів. Всі визначення виконуються в системі координат вихідного пункту, місце розташування якого точно виміряна і постійно контролюється. Виключаються помилки установки польових приймачів над відомими точками.
Важливо відзначити, що факт наявності постійно діючої базової станції дає переваги при виконанні будьяких видів ГНСС знімання. Наприклад, при роботі в статиці тепер потрібно
на один приймач менше, оскільки дані з базової станції можуть використовуватися у спільному опрацюванні результатів вимірювань. Відомо, що для точного опрацювання статичних вимірювань слід використовувати не менше трьох ГНСС приймачів (щоб можна було утворити жорсткі фігури у вигляді трикутників). У разі використання даних з базової станції достатньо буде двох приймачів для досягнення того ж рівня точності вимірювань. При роботі в режимі кінематики (наприклад, методом «Стій/іди») потрібні тільки ГНСС ровери, а всі результати будуть опарцьовані з використанням файлів вимірювань наявної базової станції. При RTK зніманні постійно діюча базова станція забезпечить поправками необмежене число RTK роверів в зоні свого покриття.
Коефіцієнти погіршення точності GNSS спостережень
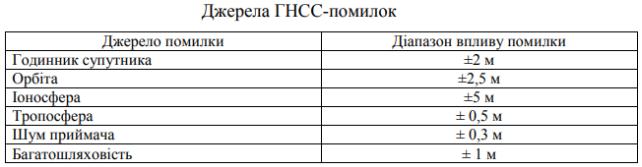
Під час опрацювання супутникових вимірів виникає необхідність ретельного дослідження впливів усіх можливих джерел похибок, особливостей їхнього виникнення та обґрунтування їх обліку.
За походженням похибки GNSS-спостережень можна поділити на три основні групи: – похибки, пов’язані неточними вихідними даними, з яких основними є похибки ефемерид; – похибки, пов’язані з впливом зовнішнього середовища: тропосферна та іоносферна затримки сигналу, а також багатошляховість; – похибки, пов’язані з GNSS-обладнанням (інструментальні джерела похибок).
Таблиця 1
Похибки положення супутника на орбіті, які надалі вважатимемо похибками орбіт, виникають внаслідок неточностей прогнозу й розрахунку ефемерид супутників на момент вимірювань.
Відомо, що на сучасному етапі розвитку ГНСС, ефемериди супутників поділяють на чотири типи:
Broadcast – бортові або трансльовані, що передаються безпосередньо від GNSS – супутників під час виконання спостережень, їх результатом є навігаційний файл (файл *.n у форматі RINEX)
Ultra-rapid – надшвидкі,
Rapid – швидкі таFinal – остаточні.
Останні три типи ефемерид отримують у центрі опрацювання IGS [http://igscb.jpl.nasa.gov/components/prods.html], де вони подані з розширенням
*.sp3/ Різниця між ними полягає у часі очікування та точності. Найточнішими є остаточні ефемериди (~ 2,5 см), які стають доступними через 12 днів від моменту проведення спостережень. За ними йдуть швидкі (від 2,5 см), які стають доступними через 17 год., та надшвидкі (~ 3 - 5 см), які можна отримати протягом поточного дня (на 3.00, 09.00, 15.00 і 21.00 UT)
Оцінити значення похибки ефемерид супутника на точність координат пункту mP можна за формулою:
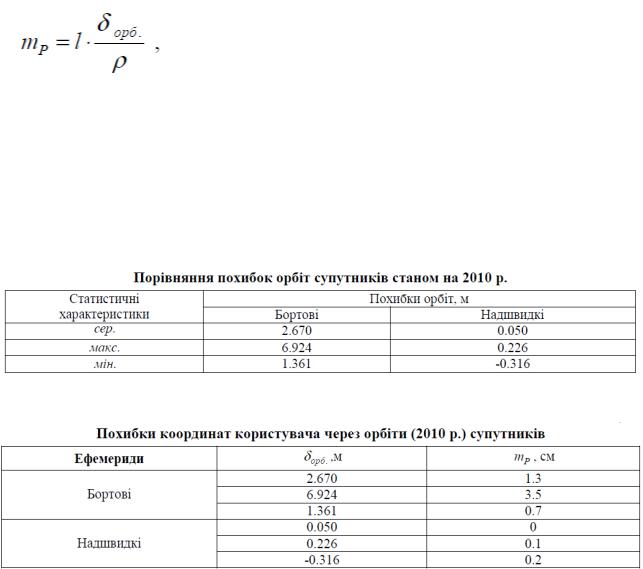
Де l – довжина базової лінії, - відстань від пункту на земній поверхні до супутника (близько 20000 км); орб. –похибка ефемерид супутника.
У табл. 2 , для прикладу, наведено порівняльні значення похибок координат супутників, визначених на основі бортових та надшвидкісних параметрів орбіт супутників.
Таблиця 2
Таблиця 3
Із таблиці 3 чітко видно різницю між використанням бортових та швидкісних ефемерид. Тому, на сьогоднішньому етапі розвитку супутникових технологій можна стверджувати, що похибки надшвидких ефемерид супутників практично не впливають на точність визначення пересувного приймача під час його роботи в режимі RTK.
Другим за значенням джерелом помилок є атмосфера, через яку проходять радіохвилі від супутника до приймача.
Під час розгляду розповсюдження радіохвиль атмосферу розділяють на три шари: тропосферу, стратосферу та іоносферу.
Наявність тропосферної складової атмосфери призводить до того, що поширення електромагнітних хвиль супроводжується зменшенням швидкості поширення порівняно з вакуумом (тропосферна затримка); викривленням траєкторії хвилі (рефракція); згасанням (послаблення інтенсивності) та флуктуаціями (випадкові зміни) параметрів хвилі, зумовленими турбулентністю атмосферного повітря. Тропосферна затримка залежить в основному від метеорологічних умов (атмосферного тиску, температури повітря, вологості), а також від висоти супутника над обрієм. Тропосферна затримка не є
дисперсійною, тому зменшити її вплив можна лише застосуванням модельної корекції.
Такі затримки сигналів викликають похибки вимірювань псевдовідстаней близько 1 метра.
Іоносфера – це іонізований атмосферний шар у діапазоні висот 50-500 км, що містить вільні електрони. Наявність цих електронів викликає затримку поширення сигналу супутника, яка прямо пропорційна концентрації електронів і обернено пропорційна квадрату частоти радіосигналу. Лінійні комбінації двочастотних вимірів не містять іоносферних похибок першого порядку. Крім того, для часткової компенсації цієї похибки може бути використана модель корекції, яка аналітично розраховується з використанням інформації, що міститься в навігаційному повідомленні. Залишкова іоносферна затримка може спричинити похибку визначення псевдовіддалі близько 10 м.
Для визначення числового значення іоносферної затримки потрібно знати величину ТЕС (Total Electron Content) – інтегральної електронної концентрації, яка становить в середньому 3·1013 ел./см3 ). Величина ТЕС може змінюватися залежно від часу доби, сезону року тощо.
Багатошляховість розповсюдження сигналу з’являється в результаті вторинного відбиття сигналу супутника від великих перешкод, розташованих у безпосередній близькості від пересувного приймача. При цьому виникає явище інтерференції і виміряна відстань виявляється більшою за дійсну. Найпростіший спосіб уникнути цього виду похибок – це вибір максимально відкритого місця для GNSS-спостережень. Оцінити аналітично цю похибку доволі важко, а її прояв чітко виявляється під час ініціалізації та отримання фіксованого розв’язку. У результаті впливу цього чинника помилка визначення псевдовіддалі може збільшитися на 2,0 м.
Інструментальні похибки приймача зумовлені насамперед наявністю шумів у електронному тракті GNSS-приймача. Відношення сигнал/шум приймача визначає точність процедури порівняння прийнятого від супутника та опорного сигналів, тобто похибку обчислення псевдовідстаней.
Тип вибраної антени істотно впливає не тільки на можливість прийняття сигналів від супутників, а й на точність супутникових спостережень. Не менш важливим показником антен є поняття фазового центру, його положення і стабільність у часі. Що стосується зсуву цього центра по вертикалі, то його визначають за допомогою спеціальних досліджень, переважно під час калібрування антени. Процес калібрування досить складний, а тривалість його для окремої антени становить 2-3 дні. Ефективно зменшити цей вид похибки може високоякісний двочастотний приймач. Наявність цієї похибки призводить до виникнення координатної похибки близько 1,2 м.
При всій точності тимчасових еталонів штучних супутників Землі існує деяка похибка шкали часу апаратури супутника. Вона призводить до виникнення систематичної похибки визначення координат близько 0,6 м.
Обчислюючи сумарну похибку на супутникові виміри, необхідно також врахувати взаємне положення користувача й супутників робочого сузір’я. Для цього вводиться спеціальний коефіцієнт геометричного погіршення точності PDOP (Position Dilution Of Precision), на який треба помножити всі перераховані вище похибки, щоб одержати остаточну похибку. Конфігурація супутників вважається доброю, якщо значення PDOP не перевищує 3, а спостереження необхідно припинити, коли PDOP більше за 6.
Максимальна величина іоносферної затримки становить в зеніті приблизно 30 м, поблизу горизонту майже в три рази більше.
Вплив нейтральної атмосфери, яка складається з тропосфери, тропопаузи та стратосфери, називається тропосферною рефракцією. Вплив тропосферної рефракції відчувається до висоти близько 40 км над поверхнею Землі. В літературі нейтральну атмосферу називають тропосферою, хоча, якщо бути точним, термін "тропосфера" не є зовсім правильним, тому що 25% впливу на сигнал, спричинюють гази, що зосереджені вище тропосфери, зокрема в тропопаузі і стратосфері.
Нейтральні частинки (атоми і молекули ) впливають на електромагнітні сигнали, зменшуючи потужність та спричиняючи їх затримку. Згасання сигналу сягає близько 0,5 дБ, а вплив затримки, приблизно, становить від 2 до 25 м. Похибки змінюються залежно від кута відсічки, оскільки при малих значеннях кута збільшується шлях проходження сигналу крізь тропосферу. Є найменшими в зенітному напрямку і збільшуються, приблизно, пропорційно косекансу кута висоти розташування супутника.
Розрізняють два основні компоненти тропосферної затримки гідростатичну δhyd і вологу складові δwet:
trop hyd wet (1)
Приблизно 90% величини тропосферної рефракції складає вплив сухої складової, а решта 10% – вологої.
Визначення затримки спрощується за допомогою функції відображення, що характеризується залежністю від кута відсічки. Загальна тропосферна затримка може бути визначена (якщо супутник не в зеніті):
trop ( e ) mhyd ( e ) hyd ,Z m wet ( e ) wet,Z, (2)
де mhyd(e) – функція відображення для гідростатичної складової; δwet,Z – зенітна волога затримка; mwet(e) – функція відображення для вологої складової; δhyd,Z – зенітна гідростатична затримка; е – кут відсічки.
Тропосферну затримку можна обчислювати, використовуючи значення метеопараметрів, які служать вихідними даними для однієї із багатьох моделей. Таким чином більшу частину тропосферної затримки можна врахувати застосовуючи порівняно прості моделі.
Релятивістські ефекти.
Розрізняють нерухому та прискорену систему відліку. Перша пов’язана з центром мас Землі, а друга – з кожним супутником GPS. Тому потрібно враховувати ефекти спеціальної та загальної теорії відносності. Релятивістські ефекти впливають на орбіти супутників, поширення сигналу супутника, годинники як приймача, так і супутника.
Вплив чинників, які "підпорядковуються" теорії відносності є досить незначним. Вони можуть мати постійний та періодичний характер. В першому випадку їх вплив корегується шляхом приведення номінальної частоти сигналу супутника до частоти сигналу, прийнятому на станції.
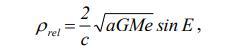
Причиною факторів періодичного характеру є припущення про те, що орбіти – колові. Формула відповідної поправки має вигляд:
де – а велика піввісь, е – ексцентриситет, Е – ексцентрична аномалія.
Багатошляховість.
Антеною приймача можуть прийматися сигнали, які надійшли не тільки безпосередньо з супутника, але і відбиті від навколишніх предметів. Це явище має назву багатошляховості. Вона порушує модуляцію С/А-коду і Р-коду і спостереження несучої фази. Хоча прямі і розсіяні сигнали мають однаковий час виходу з супутника, вони надходять до приймача зі зміщенням коду і фази, що зумовлено різницею в довжинах шляхів сигналів від супутника до приймача. Теоретичне максимальне зміщення внаслідок багатошляховості в псевдовіддалі може сягати 150 м для С/А- коду і 15 м для Р коду. А для фази не перевищує близько 1/4 від довжини хвилі, тобто 5-6 см для L1 або L2. Коли геометрія "супутник-приймач" змінюється (і відповідно змінюється кут падіння і відбиття сигналу по відношенню до відбиваючої поверхні), вплив багатошляховасті змінюється за синусоїдальним законом і, здебільшого, усереднюється за період від декількох хвилин до чверті години або більше. Оскільки багатошляховість залежить від геометрії "супутникприймач", то помилка визначення положення здебільшого повторюється кожної зоряної доби.
Сигнали можуть відбиватися поблизу супутника (супутникова багатошляховість) або приймача (багатошляховість приймача).
Для визначення чи передбачення впливу багатошляховасті не існує загальної математичної моделі, однак її вплив на вимірювання віддалі можна визначити комбінуванням фазових даних несучої фази для L1 і L2 і псевдовіддалі.
Деякі автори пропонують виявляти та усувати множинність сигналу з допомогою перетворення Фур’є. Крім того, необхідно перевіряти місця встановлення апаратури, уникати металевих споруд та сплетінь металевих проводів.
Похибки апаратури супутника і приймача.
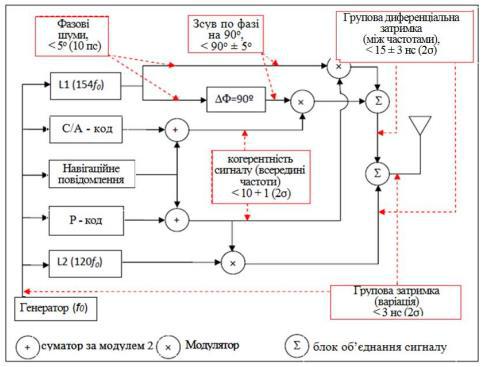
Похибки виникають в апаратурі супутника або приймача та спричинені електронікою, що опрацьовує чи формує частоти і радіосигнали, крім помилки годинника (неточності в показах годинника по відношенню до єдиного часу GPS). При вимірюваннях виникають певні помилки в GPSсигналах, як це показано на рис. 1. (а саме сигналів, що передавалися супутниками блоку IIR, до модернізації системи). Подібне явище можна також спостерігати в приймачі, коли він генерує сигнал-репліку.
Рис.1 Зсуви в супутниковій апаратурі
Деякі пояснення до рис 1:
- фазовий шум: несуча фаза повинна бути визначена з точністю 0,1 радіан, що є еквівалентом 5° або 10 пс для GPS-частот;
-зсув по фазі на 90°: два L1 компоненти модулюються С/А-кодом і Р-кодом
уфазовій квадратурі (зсув по фазі на 90°).
-групова затримка: визначається як затримка між вихідним сигналом, який модулюється конкретним супутником (вимірюється від фазового центру антени) і вихідним сигналом цього супутника, вбудованим в носій частоти.
-групова диференціальна затримка (міжчастотна). Абсолютне значення середньої диференціальної затримки не повинно перевищувати 15,0 нс, а відхилення від середнього не повинно перевищувати 3,0 нс (95% ймовірності).
Поправки для компонентів групової диференціальної затримки містяться в навігаційному повідомленні та складаються з таких параметрів, як загальна групова затримка (TGD) і міжсигнальна поправка (ISC).
- когерентність сигналу (всередині частоти). Середня різниця між складовими (чіпами) сигналів модульованих на однакових несучих частотах, L1 P – L1 C/A і L2 P – L2 C/A, не повинна перевищувати 10 нс. Варіація часової різниці не повинна перевищувати 1 нс (ймовірність 95%).
При об’єднанні кодових і фазових спостережень похибки апаратури створюють суттєві проблеми. Ті похибки, які не можна усунути, як правило, "об’єднують" з іншими факторами, і після цього їх можна оцінити. Отже, ефект кожної похибки можна певним чином врахувати
Точність ефемерид
Ефемериди, що передаються супутником в навігаційному повідомленні (бортові ефемериди), приймач отримує безпосередньо в процесі вимірювань.
Точність цих ефемерид постійно покращується, на початку 1980-х років для супутників GPS вона складала 20 - 30 м, а сьогодні – 100 см. Така точність, загалом, бортових ефемерид є достатньою при віддалях до декількох десятків кілометрів. Якщо точність ефемерид бортового повідомлення недостатня, то можна скористатися точними ефемеридами. Ефемериди, що передаються із сигналом супутника, наведені у табл. 4.
Таблиця 4
Ефемериди, які передаються з супутника