

Усі лекції
.pdfДодаток 15.
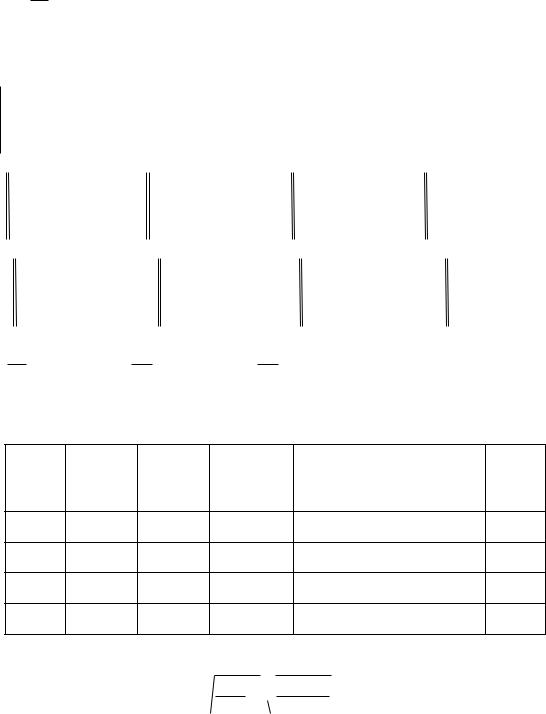
Журнал супутникових радіовіддалемірних спостережень
Використовувати для кожної сесії новий лист.
Організація: НУ “ЛП” |
Cпостерігачі: Сідоров І.С. |
|
Дата: 18.06.01 |
Назва станції: Шацьк |
GPS-день (DAY): 169 |
4-симв. ID (XXXX): SHAT |
Сесія №(S): 1 |
Назва маркера (центра): 1512 |
|
Для переписування даних: ім’я файлу XXXXDAYS.(dat/eph/ion/mes/zip/arj/???)
Ім’я файлу: |
|
|
|
|
Програма архівування: |
|
|||
Тип приймача: SR 9500 |
|
|
Приймач: Leica |
|
|
|
|||
Тип антени: AT 302 |
|
|
Антена: Leica |
|
|
|
|||
Джерело струму: автоакумулятор |
|
Довжина кабелю: 3 м. |
|
||||||
Запис спостережень з висоти |
|
Інтервал записування спостережень |
|||||||
(Elev.Mask): |
|
|
|
через: 30 секунд |
|
|
|
||
50 |
100 |
150 |
200 |
|
|
|
|
|
|
Моменти запису спостережень: |
|
|
|
|
|
|
|
||
Початок: 9.00……………………….UT(MT) |
|
|
|
|
|
||||
Кінець: 19.00……………………….UT(MT) |
|
|
|
|
|
||||
Висота антени: 1.752 м. |
|
Вимірюється висота від центра знаку |
|||||||
Вертикальна висота до |
|
|
до днища антени (ARP) вертикально. |
||||||
ARP:…………….мм. |
|
|
|
|
|
|
|
|
|
Вертикальна висота до |
|
|
|
|
|
|
|
|
|
землі…………….мм. |
|
|
|
|
|
|
|
|
|
Похила висота захисної |
|
Похила висота вимірюється від центра |
|||||||
площини:………..мм. |
|
|
знаку до захисної площини. |
|
|||||
Зауваження встановлення антени і |
|
|
|
|
|
|
|
||
вимірювання величин (висоти антени, |
|
|
|
|
|
|
|||
метеоданих, тощо): |
|
|
|
Метеорологічна інформація: |
|||||
|
|
|
|
Час |
|
toC |
toC |
|
Тиск |
|
|
|
|
|
|
сух. |
мок. |
|
мм.рт.ст. |
|
|
|
|
9.00 |
|
28,5 |
25,4 |
|
752 |
|
|
|
|
11.00 |
|
28,8 |
25,5 |
|
752 |
|
|
|
|
13.00 |
|
29,0 |
25,7 |
|
754 |
|
|
|
|
15.00 |
|
29,2 |
25,8 |
|
754 |
|
|
|
|
17.00 |
|
29,0 |
25,5 |
|
756 |
|
|
|
|
19.00 |
|
28,7 |
25,4 |
|
756 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
продовження додатку 15.
продовження додатку 15
Графічне визначення елементів приведення.
|
Контрольний кут |
|
|
|
|
Величина редукції |
||
на рисунку |
|
виміряний приладом |
e |
= |
|
м. |
|
на пункт |
|
|
|
|
= |
0 |
’; |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
= |
0 |
’. |
|
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
Висотна прив’язка пункту.
Погода:…………………………………………… Зображення:………………………………………
|
|
|
|
|
|
|
|
Схема прив’язки |
||
|
|
|
|
|
|
|
|
|
|
|
№ штатива, |
Спостереження по |
Контрольні |
|
Спостереження по середній лінії |
|
Середнє |
|
|||
№ рейок |
далекомірних нитках |
перевищення |
|
|
|
|
|
перевищення |
|
|
|
Задня |
Передня |
|
|
Задня |
Передня |
Перевищ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контр. обч. |
|
|
|
|
|
|
|
|
|
|
Визначення нормальних висот пунктів за результатами супутникового нівелювання
1.Координати, нормальні та геодезичні висоти реперів та висоти квазігеоїда над еліпсоїдом Красовського.
№ |
|
|
|
|
|
|
|
|
|
|
|
N H |
нор |
H |
|
|
|
|
|
|
|
|
|
|
H нор . |
|
|
|
|
репера |
|
B |
|
|
|
|
L |
|
|
H |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
B |
0 |
|
|
|
0 |
|
|
|
|
|
|
0 |
, |
“ |
|
0 |
, |
“ |
L |
(м) |
(м) |
(м) |
|
||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
50 |
21 |
51 |
50.364167 |
30 |
29 |
48 |
30.496667 |
224.877 |
199.520 |
-25.357 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
50 |
32 |
3 |
50.534167 |
30 |
27 |
11 |
30.453056 |
230.122 |
204.907 |
-25.215 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
50 |
22 |
40 |
50.377778 |
30 |
38 |
24 |
30.640000 |
230.729 |
205.562 |
-25.167 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
4 |
50 |
30 |
58 |
50.516111 |
30 |
36 |
9 |
30.602500 |
231.527 |
206.384 |
-25.143 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.Координати пункту №5 ДГМ B=50026 43” (500.4452777) L=30030 03” (300.500833) H= 230,425 м.
3.Коефіцієнти лінійних рівнянь N N0 a B b L для висотних реперів.
№ |
N |
0 |
a |
b |
N |
|
|
|
|
|
|
репера |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
50.364167 |
30.496667 |
-25.357 |
|
|
|
|
|
|
2 |
1 |
|
50.534167 |
30.453056 |
-25.215 |
|
|
|
|
|
|
3 |
1 |
|
50.377778 |
30.640000 |
-25.167 |
|
|
|
|
|
|
4 |
1 |
|
50.516111 |
30.602500 |
-25.143 |
|
|
|
|
|
|
4. Коефіцієнти нормальних рівнянь
|
[ N 0 |
|
[ a |
|
[ b |
|
[ N |
|
|
|
|
|
|
|
|
[ N 0 |
|
4 |
|
201.79222222 |
|
122.19222222 |
-100.8820324 |
|
|
|
|
|
|
|
|
[ a |
|
201.79222222 |
|
10180.04926 |
|
6164.3533891 |
-5089.288976 |
|
|
|
|
|
|
|
|
[ b |
|
122.19222222 |
|
6164.3533891 |
|
3732.7578767 |
-3081.734261 |
|
|
|
|
|
|
|
|
5. Розв'язок системи нормальних рівнянь
|
|
D |
|
|
|
|
|
xi |
i |
де |
xi - відповідно |
N 0 , a, b - невідомі інтерполяційні коефіцієнти. |
Di |
||
D |
|||||||
|
|
|
|
|
|
лівої частини матриці утвореної заміною i -стовпця стовпцем [ N .
Детермінант матриці розміром 3*3 визначається за наступною формулою
- детермінант
a |
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
11 |
|
12 |
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
21 |
a |
22 |
a |
23 |
a |
a |
22 |
a |
33 |
a |
a |
23 |
a |
31 |
a |
a |
21 |
a |
32 |
a |
a |
22 |
a |
31 |
a |
a |
22 |
a |
32 |
|
|
|
11 |
|
|
12 |
|
|
13 |
|
|
13 |
|
|
11 |
|
|
|||||||||||||
a |
31 |
a |
32 |
a |
33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
[N |
N |
0 |
[N |
a |
[N |
b |
[N |
N |
[N |
a |
[N |
b |
0 |
|
0 |
|
0 |
|
0 |
|
0 |
|
0 |
|
a |
a |
21 |
a |
33 |
12 |
|
|
.
D |
[N |
a |
|
[aa |
|
||||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
[N |
b |
|
[ab |
|
||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
[N |
N |
0 |
[N |
0 |
N |
|||
|
|
|
|
|
0 |
|
|
|
|
||
D |
2 |
|
|
[N |
0 |
a |
[aN |
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
[N |
b |
[bN |
|||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
D |
|
-93.869, |
|
|
||||
x1 |
|
1 |
|
x2 |
|||||||
|
D |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
[ab |
|
= 0.00204255, |
|
D1 |
|
[aN |
|
|
|
|||
[bb |
|
|
|
|
|
|
|
[bN |
|
|
|
|
[N |
|
b |
|
|
|
|
|
[N |
N |
0 |
||
|
0 |
|
|
|
|
|
|
0 |
|
|
||
|
[ab |
0.00165263, |
D3 |
|
[N |
0 a |
||||||
|
[bb |
|
|
|
|
|
[N |
b |
||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
D |
2 |
0.80910, x3 |
|
D |
|
0.91107. |
|||||
|
3 |
|
||||||||||
D |
D |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
[aa |
|
|
[ab |
|
|
[N |
0 |
a |
|
|
|
[aa |
||
[ab |
||
[ab |
|
|
-0.19173327, |
[bb |
|
|
|
[N |
0 |
N |
|
|
|
|
|
[aN |
0.0018609, |
||
[bN |
|
||
продовження додатку 27.
6. Оцінка точності апроксимаційної моделі висот квазігеоїда.
№
репера
1
2
3
4
N |
0 |
|
-93.869
1
1
1
1
a |
b |
0.80910 0.91107
50.364167 30.496667
50.534167 30.453056
50.377778 30.640000
50.516111 30.602500
N |
обчисл |
|
(м)
-25.335
-25.237
-25.194
-25.116
|
N |
вим |
|
|
|
|
|
|
(м) |
v (м) |
|
|
|
||
|
-25.357 |
0.021 |
|
|
-25.215 |
-0.022 |
|
|
-25.167 |
-0.027 |
|
|
-25.143 |
0.027 |
|
|
|
|
|
vv 0.00242 |
|||
vv
0.00047
0.00049
0.00072
0.00074
m
vv  n 1
n 1


0.00242 0,03 м.
3
7. Обчислення висоти квазігеоїда на пункті №5 ДГМ
NN0 a B b L =-93.869+0.80910*500.4452777+0.91107*300.500833=-25.266 м.
8.Обчислення нормальної висоти пункту №5 ДГМ
Hнор H N = 230.425-25.266=205.159 м.
Застосування GNSS –вимірювань.
Вирішення інженерних задач за допомогою GNSS - технологій
З часу появи GNSS технології використання методу супутникового визначення координат постійно вдосконалювалися. Для тих задач, де вимагалася точність 1 м і вище, GPS метод можна було використовувати лише у диференційному режимі. Для забезпечення цього режиму необхідно було передати поправки, що визначалися як різниця відомих координат базової станції з виміряними їхніми значеннями, на станцію, координати якої треба знайти. Передавати поправки безпосередньо у координати виявилося неефективним і їх почали вводити у виміряні параметри – псевдовідстані.
Диференційний режим GPS-методу почали називати DGPS, а відтак DGNSS. Оскільки обчислювати псевдовідстані можна було на основі кодових і фазових вимірювань, то і технології DGPS поділяли на кодові і псевдофазові. Диференційний режим за кодовими вимірюваннями ґрунтується на вимірюванні та обробленні псевдовідстаней, має, загалом, необмежену область дії і характеризується похибками визначення координат від часток метра до декількох метрів.
Системи диференційної навігації, побудовані за кодовими вимірюваннями, поділяють на локальні (Local Area Differential GPS), широкодіапазонні (Wide Area Differential GPS, WADGPS) та глобальні (Global Differential GPS, GDGPS).
Локальних систем диференційної навігації є достатньо багато, вони мають область дії до 200 км і застосовуються, як правило, для морської навігації. Сьогодні у світі найвідомішими є тільки дві широкодіапазонні системи диференційної навігації. Система WAAS (Wide Area Augmentation System) належить уряду США і зорієнтована на територію Північної Америки та система EGNOS (European Geostationary Navigation Overlay Services), що керується Європейським космічним агентством (ESA) і
фінансується Євросоюзом.
Компанія OmniSTAR є світовим лідером у галузі глобальної системи DGPS. Глобальний сервіс
OmniSTAR XP, а також регіональні сервіси VBS (Virtual Base Station) та HP (High Performance)
забезпечують точність визначення координат від 1 м до 10 см при використанні тільки одного приймача. OmniSTAR, яка має в активі 100 наземних базових станцій, три центри завантаження даних на спутники і два контрольні центри глобальної мережі, надає надійний сервіс у галузі координатного забезпечення у безперервному режимі на всю територію Землі.
Всі перелічені сервіси DGPS є, як правило, платними. Так, наприклад, стандартні ціни у Північній Америці для GIS/картографії застосувань: OmniSTAR VBS – $800.00 1 рік/1 приймач;
OmniSTAR XP – $1500 1 рік/1 приймач; OmniSTAR HP – $2500 1 рік/1 приймач [16] і, відповідно, в Україні: OmniSTAR VBS – 5580 грн 1 рік/1 приймач; OmniSTAR HP – 15 000 грн. 1 рік/1 приймач.
Диференційний режим за псевдофазовими вимірюваннями характеризується, з одного боку, доволі високою точністю (до часток сантиметра), проте у реалізації мав істотні обмеження щодо області дії (~10–12 км). Специфічною особливістю цього виду диференційного режиму була неоднозначність псевдофазових вимірювань на більших відстанях, що обмежувала його використання. Крім обмеження у відстані, серйозною перепоною на шляху широкого впровадження цієї технології було передавання диференційних поправок каналами зв’язку у режимі реального часу. Основним засобом для передавання диференційних поправок був радіоканал, а деякі GPS-приймачі ще досі обладнуються радіомодемом.
Поява у середині 90-х ХХ ст. технології RTK (Real Time Kinematic) GPS стала знаковою подією у розвитку систем точного спутникового позиціонування. Розроблення алгоритмів для надійної фіксації неоднозначностей привело до істотного вдосконалення приймачів GPS-сигналів (вони стали мультичастотними RTK, GPS, ГЛОНАСС і WAAS/EGNOS приймачами з можливістю приймання нових сигналів модернізованої GPS L2C та L5), а використання нових телекоммунікаційних можливостей забезпечило широке впровадження диференційного режиму за псевдофазовими вимірюваннями, який почали називати технологією RTK.
Щоб розширити область дії RTK-технології, почали використовувати не одну базову станцію, а мережу таких станцій. Загалом можна говорити про те, що сьогодні технології RTK для задач точного визначення координат вийшли на рівень виробничих робіт.
Отже, запровадження RTK-технології особливо проявило себе у двох напрямах:
1) фактично стало можливим отримувати сантиметровий рівень визначення координат безпосередньо під час виконання спостережень, тобто опрацювання звелося до мінімуму і мало почало залежати від суб’єктивних факторів;
2) значно розширилися області застосування систем GNNS, адже, крім геодезії (створення опорних мереж, кадастрові роботи, землеустрій) і деяких фундаментальних застосувань (визначення деформацій земної кори, параметрів орієнтації Землі тощо), тепер стало можливим її ефективне використання і у системах управління рухом транспорту, службах безпеки, гідрографії, лазерному скануванні місцевості і аерозніманні, дослідженнях клімату та багатьох інших.
Протягом останнього десятиліття фахівці, які виконують роботи із землеустрою та кадастру, переконалися у тому, що супутникові технології мають велике майбутнє, адже їх можна використовувати для визначення координат у ході геодезичного забезпечення, зокрема землевпорядних та кадастрових робіт.
Опрацювання GNSS-спостережень вважається одним з головних кроків до точного визначення просторових координат точок на поверхні Землі. На сьогодні сучасні супутникові технології координатного забезпечення, точне позиціонування і моніторинг навколишнього середовища посідають провідне місце як при дослідженнях глобальних геодинамічних процесів, так і на локальному рівні – у вирішенні актуальних завдань геодезії, землевпорядження, кадастру, точного землеробства тощо
Сьогодні визначення просторових координат об'єктів на земній поверхні в режимі реального часу (RTK) стає найпопулярнішою технологією, завдяки якій геодезисти можуть отримувати координати з точністю до декількох сантиметрів безпосередньо в польових умовах.
Існує безліч застосувань результатів GNSS знімання.
До них належить розвиток опорних геодезичних мереж усіх рівнів, проведення нівелірних робіт, дослідження сейсмічної активності тощо, але до найактуальніших потреб розвитку міста варто зарахувати картографію та геоінформатику і, як результат, створення геоінформаційних систем (ГІС), для ведення яких необхідна достовірна та точна геопросторова інформація. інженерні вишукування,
геодезичні роботи, картографія, ГІС, кадастрові роботи, будівництво доріг і складних інженерних споруд, системи управління будівельною технікою, системи точного землеробства, моніторинг деформацій інженерних об'єктів, навігація транспорту і
У випадках, коли існує проблема з отриманням інформації в результаті GNSS знімання, загальною практикою є комбінування типів знімання, наприклад, тахеометричне знімання + GNSS. Але такий спосіб потребує порівняно великих затрат людського та часового ресурсу, до того ж сумарна вартість обладнання іноді недоступна рядовому виконавцю, а зусилля, докладені до тахеометричного знімання, – невиправдані. Таким чином, існує потреба вирішити проблему GNSS знімання у місті, за наявності значної кількості фізичних перешкод.
Сфери використання GNSS RTK геодезичного комплекту:
-Геодезичні дослідження
-Кадастрові роботи
-Супровід будівництва
-Управління будівельними машинами та іншою технікою
-Лісове господарство
-Комунальне господарство
-Агрономія та сільське господарство
Переваги RTK GNSS
Сантиметрова і навіть міліметрова точність Висока швидкість вимірювань без постобробки
Передача поправок може здійснюватися по радіоканалу (опція) або ж з використанням мереж мобільних операторів, якщо роботи виконуються в зоні їх покриття
Здійснювати винос в натуру, використовуючи RTK GPS приймач, простіше, ніж за допомогою тахеометра: вимірювання можна проводити наодинці. Базова станція в процесі роботи не вимагає спостереження, а ровер може віддалятися від бази на велику відстань.
Основні ФУНКЦІЇ RTK GPS приймачів:
Межування Прив’язка точок до місцевості Вихід на точку
RTK зйомка
Вимірювання малих ділянок Створення карти полів Облік проведених робіт Визначення площі Визначення відстаней Збереження координат Відображення в Google Maps
Відображення в системі Агропрофіль Мобільний офіс
Використання високоточних GNSS приймачів в сільському господарстві дозволить точніше виконувати роботи, знизити огріхи і похибки. Компанії пропонують універсальні GNSS приймачі для точного землеробства, які можуть бути налаштовані під будь-які потреби:
точне позиціонування, точне вимірювання площі полів,
вимірювання маленьких площ, навіть якщо це кілька квадратних метрів, точне паралельне водіння.
ВИКОРИСТАННЯ GNSS ТЕХНОЛОГІЙ ПРИ СТВОРЕННІ ЦИФРОВИХ МОДЕЛЕЙ РЕЛЬЄФУ
Цифрова модель рельєфу (ЦМР) - це представлення об'єктів рельєфу у вигляді масиву точок з трьома відомими координатами. ЦМР дозволяє виконувати апроксимацію рельєфу з врахуванням природних характеристик, а також зв'язків між об'єктами, що розташовані на земній поверхні.
ЦМР можна побудувати на основі даних, що отримані різними способами , зокрема за даними аерофотознімання, за допомогою класичних методів та за даними GNSS спостережень.
Зокрема розглянемо створення цифрової моделі місцевості високої роздільної здатності двома GPS-методами. Дані для побудови ЦМР отримували в результаті проведення GPS-кампанії, яка передбачала статичну і кінематичну зйомку місцевості. Всі дані були зібрані з використанням двочастотних GPS приймачів.
В першому випадку локальна GPS мережа була складалася з чотирьох точок - дві з них були розміщені у верхній частині пагорба, а два інших - в нижній частині. Положення кожного маркера було визначено з трьох статичних GPS сеансів, тривалість яких становила близько 8 годин кожен. Ці дані були об'єднані з даними трьох перманентних GPS станцій. Кінематична зйомка виконувалась при таких умовах: кут відсікання при реєстрації спостережень становив 15°, частота реєстрації даних - 2 секунди, мінімальна кількість супутників у полі зору приймача становила 5. Кожен GPS-приймач збирав дані протягом близько 3 год. В результаті були отримані дані з точністю ±10 см і побудована цифрова модель рельєфу фрагменту земної поверхні загальною площею близько 150 000 м2 і точністю відтворення від 30 см до 1 м.
Місцем проведення було вибрано пагорб із середньою висотою над рівнем моря 1036 м. Методика проведення робіт полягала у виконанні вимірювань за допомогою нівеліра Pentax AL-320 і
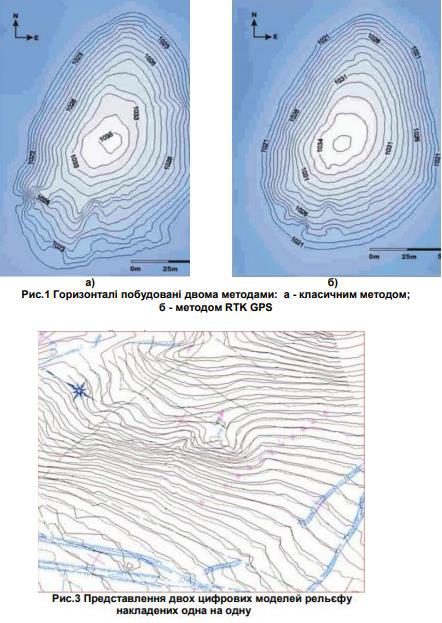
віддалеміра Zeiss Elta RS 45. Після цього на цих самих точках проводилися GPS спостереження в режимі RTK. Зауважимо, що вимірювання проводились через кожні 5 м у двох напрямах – із заходу на схід та з півдня на північ. Всього були отримано координати 53 точок. В результаті апроксимації даних, отриманих за допомогою двох методів, були побудовані горизонталі (рис.1)
Таким чином, використання GNSS технологій дозволяє отримати достатню точність для побудови ЦМР. Для національних або регіональних проектів, які мають на меті опрацювання значних площ земної поверхні, інколи недоцільно використовувати класичні методи збору інформації.
При використанні GNSS методів, коли точки широко рознесені на місцевості, модель рельєфу може недостатньо представляти нерівності та зміни, що відбуваються між виміряними точками. Наприклад, у Великобританії, де мережа GPS станцій розвинена по всій країні, використовуються саме дані GNSS вимірювань. Тим не менш, ЦМР часто створюються за даними різних джерел. Нерідко для ЦМР використовуються додаткові дані, наприклад, датчиків стану солоності, стану атмосфери та ін. Все це об'єднується з даними топографії і створюється ЦМР більш конкретного призначення. З іншого боку, створення цифрових моделей рельєфу (ЦМР) за даними, зібраними при аерофотозніманні або супутниковими методами можуть включати витрати, які є надмірно високими, особливо для малих та середніх компаній. Рішення про використання всіх трьох технологій разом або кожної окремо залежить від бажаного майбутнього результату, сфери застосування та вимог замовника. Відповідно до цього і вибирається метод збору інформації для побудови ЦМР.
Проаналізувавши досвід використання GNSS технологій в сфері створення цифрових моделей рельєфу, можна зробити висновок, що GNSS технології широко застосовують для побудови ЦМР. Точність отримуваних даних є співрозмірною з даними, що отримуються класичними методами, методами дистанційного зондування та цифрової фотограмметрії. Отже, використання GNSS технологій дозволяє суттєво покращити продуктивність праці, а економічна привабливість GNSS методу збору даних при стає очевидною при значних площах виконання робіт.
ВИСОКОТОЧНІ МЕТОДИ ОТРИМАННЯ СУПУТНИКОВИХ НАВІГАЦІЙНИХ ДАНИХ ДЛЯ ЗАДАЧ ПРЕЦИЗІЙНОГО ВОДІННЯ
Інтенсивний розвиток космічної навігації дозволив створити супутникові методи точного визначення координат рухомих в просторі об’єктів
Всучасному фермерському господарстві велике значення приділяється точності виконання робіт. Саме від цього показника багато в чому залежить рентабельність технологічних процесів і в кінцевому підсумку те, який прибуток чекає в кінці сезону.
Спеціально для аграріїв створені пакети послуг Agro RTK, які призначені для надання точного RTK-сигналу для сільськогосподарської техніки. Agro RTK - це послуга корегуючого сигналу RTK в процесі виконання агротехнічних робіт.
Завдяки мережі сервер передає RTK поправки з встановлених компанією базових станцій на приймач вашого трактора, що дозволяє досягти точності 2 см в будь-якій точці України.
Вобласті точного землеробства для прийняття управлінських рішень з мінімальними витратами при розв’язанні ряду прикладних задач назріла гостра необхідність високоточного визначення місцезнаходження кожного підконтрольного рухомого об’єкта за допомогою GNSS. Саме завдяки цій системі – найважливішого компонента системи прецизійного землеробства – з’явилася можливість для переходу від традиційної агротехнології до технології точкового землеробства, при використанні якої враховуються дані локальної диференційованості ґрунтового покриву або посіву в полі. На території України в основному функціонує навігаційна підсистема, якою оснащується сільськогосподарська техніка, включає в себе багатоканальні GPS/GLONASS-приймачі, що підключені до бортового комп’ютера з програмним забезпеченням, необхідного для виконання обчислень. Даний комплекс дозволяє вести запис поточних координат агрегату, його висоти та інших параметрів із будь-якими заданими інтервалами часу.
Функціонал системи розрахований на розв’язання таких основних задач з використанням розробленого програмного забезпечення: – визначення місцеположення, побудова траєкторії і контроль за швидкістю руху (простою) транспорту, сільськогосподарської техніки та механізмів при проведенні агротехнологічних операцій, розрахунок пройденої або обробленої площі; – задання маршруту (траєкторії) руху та контроль відхилень; – запис в оперативну пам’ять за певний проміжок часу просторових даних, технічних (для сільськогосподарської техніки – обороти двигуна, швидкість, витрати палива) і технологічних (для сільськогосподарських робіт – площа оранки, дози внесення добрив) параметрів, з функцією їх контролю
ВИКОРИСТАННЯ GNSS В БУДІВНИЦТВІ
Спостереження за деформаціями будівель і споруд
Спостереження за деформаціями будівель і споруд виконують в період будівництва та експлуатації, які в залежності від характеру переміщень та деформацій споруд і їх конструктивних елементів поділяють на наступні типи визначуваних величин :
- вертикальні переміщення – це переміщення, що відбуваються в результаті ущільнення ґрунту, корінних змін структури ґрунту в результаті обводнення, під впливом зовнішніх навантажень та власної ваги ґрунту, виконання підземних робіт;
-горизонтальні переміщення – це планові зміщення споруд, які виникають внаслідок зсувних явищ на узгір’ях та одностороннього навантаження;
-крен визначають як різницю вертикальних переміщень двох фіксованих точок на протилежних частинах споруди вздовж обраної осі. Для споруд баштового типу крен – відхилення вертикальної осі споруди від прямовисної лінії.
Використання супутникових технологій під час моніторингу стану споруд є оптимальним доповненням традиційних геодезичних спостережень. Схема моніторингу базується на класичній
геодезичній мережі для визначення деформацій, тобто методу визначення зміщень контрольних пунктів відносно опорних, розміщених поза зоною деформацій.
До складу системи моніторингу з використанням ГНСС входить мережа базових станцій (жорстко зафіксована супутникова антена та приймач ГНСС), що розташовані поза зоною деформацій та мережа робочих станцій – на об’єкті спостереження. Даний метод спостереження дозволяє визначати положення фіксованих точок будівельних конструкцій споруд в реальному часі та отримати детальний опис експлуатаційних характеристик споруди протягом тривалого проміжку часу. Перевага даного методу моніторингу в його неперервності. В результаті виконання пост обробки обчислюють координати контрольних точок на споруді, які дозволяють зробити висновки про просторові переміщення споруди. Окрім даних про загальну зміну положення споруди в просторі, моніторинг з використанням ГНСС дає можливість досліджувати та аналізувати коливання висотних споруд.
Схема ГНСС-методу визначення просторових зміщень споруди
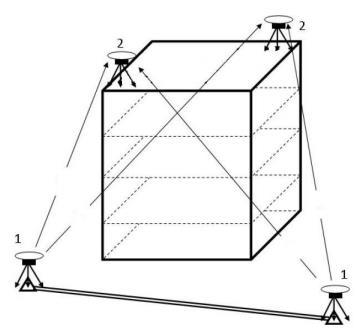
Технологія з використанням GNSS вимірювального комплексу для забезпечення проектних геометричних параметрів
Компанією Leica Geosystems під час будівництва найвищого на сьогоднішній день хмарочоса Burj Khalifa запропоновано технологію з використанням сучасних високоточних геодезичних приладів та устаткування.
Геодезична основа на будівельному майданчику була у вигляді постійно діючої базової GPS станції. В свою чергу на монтажних горизонтах розташовувалось декілька комплектів GPS приймачів з співвісним розташуванням антен та призмвідбивачів 360° (рис.2.). Ці точки служили пунктами внутрішньої просторової геодезичної мережі для координатного визначення станцій встановлення електронних тахеометрів засобами зворотної засічки, для подальшого виконання детальних розмічувальних робіт. Вимірювальний комплекс складається з GPS приймачів, електронних тахеометрів, високоточних двоосьових інклінометрів для визначення відхилень від вертикалі і спеціалізованого програмного забезпечення, для спільного опрацювання даних із супутникових приймачів і даних із інклінометрів. Програма збирає дані з отриманих приладів про стан вертикальної осі споруди в умовах динамічних навантажень та виконує розрахунок координат пунктів просторової геодезичної мережі в режимі реального часу.
Запропонована технологія з використанням вимірювального комплексу дозволяє з високою точністю виконувати інженерногеодезичні роботи для забезпечення проектних геометричних параметрів висотних будівель та споруд в умовах динамічних навантажень.
