

2.З.Точність абсолютних визначень маятниковим методом
Як відомо, значення g в пункті спостереження цим методом обчислюють за формулою (2.22)
Розглянемо вплив похибок вимірювання зведеної довжини l і періоду коливання Т на точність визначення прискорення сили ваги g. Для цього знайдемо логарифмічну похідну рівняння (2.22.) за змінними Т. lі g .
 , (2.26)
, (2.26)
 ,
(2.27)
,
(2.27)
вимірювання,
то тоді одержимо

 (2.28)
(2.28)
впливи
обидвох похибок
Якщо
покласти рівними і однаковим



 ,
,
 (2.29)
(2.29)
Для маятників зі зведеною
довжиною l = 100см, а Т=1с при заданій помилці т8=0.1 мГал одержимо допустимі похибки періоду коливання і зведеної довжини
тт = 3.5*10-8с,
те = 0.71*10 -5см.
Для маятників (Т=0.5с, і l=0.25м) ці величини будуть такими: mт =1.8 10-8 с, ml=0.02мкм. Щоб досягти такої точності, зведену довжину вимірюють інтерференційним методом, а період коливання - за допомогою кварцових годинників.
Балістичний метод абсолютних вимірювань прискорення сили ваги
Як було відзначено раніше, маятникові абсолютні вимірювання прискорення сили ваги обтяжені рядом систематичних помилок, і одержати результати з високою точністю дуже важко. На основі нових досягнень науки і техніки у 50-60 роках нашого століття почались дослідження щодо конструювання нового типу приладів, що грунтуються на вільному падінні тіла. Балістичний метод абсолютних визначень базується на законі прямолінійного рівноприскореного руху тіла, згідно з яким
 (2.30)
(2.30)
де
l0, v0 - шлях і швидкість в початковий момент часу,
l- шлях, пройдений падаючим тілом,
t- час падіння тіла,
Якщо
l0=0
Vо=0,
то


Для визначення £ необхідно виміряти шлях l і час t, забезпечуючи при цьому падіння тіла в вакуумі При вимірюваннях балістичним методом спостерігають рух тіла на відрізку до їм, щоб забезпечити відносну точність (10 8-109) Але на цьому відрізку прискорення сили ваги змінюється, тому необхідно урахувати вертикальний градієнт сили ваги W22 = 0.З мГая/м 3 врахуванням цього для співвідношення (2.30 ) запишемо
 (2.31)
(2.31)
Звідси
 (2.32)
(2.32)
Останній член, що виражає вплив вертикального градієнта на прискорення сили ваги для вихідних даних l=1 м, l() =0 05 м, v0= 1 мс-1 і t=0 35 с, може досягати 0 08 мГал, що набагато перевищує точність вимірювань балістичним методом Слід зауважити, що в формулі (2 32) величини l0 і V0 є невідомими, а l0-прискорення сили ваги в початку координат Щоб визначити g0, необхідно зафіксувати як мінімум три положення тіла і розв’язати систему рівнянь вигляду (2 32) Точки траєкторії, в яких фіксується положення тіла, називають станціями Існує декілька варіантів балістичного методу, які ділять на симетричні і несиметричні При симетричних способах спостерігають вільний рух підкинутого догори тіла до вершини траєкторії і вниз При несиметричних способах спостерігають падіння тіла тільки вниз Спочатку' розглянемо несиметричні способи
Несиметричний спосіб трьох станцій
В цьому способі фіксують проходження падаючого тіла вниз через три станції(див. рис. 4)
Рис.4.
Несиметричний спосіб трьох станцій
Використовуючи
вираз (2.31) запишемо два рівняння руху:
 (2.33)
(2.33)
 (2.34)
(2.34)
Якщо прийняти позначення (див. рис. 4)

 (2.35)
(2.35)
то тоді
 (2.36)
(2.36)
 (2.37)
(2.37)
Остаточна формула для обчислення прискорення сили ваги в початку координат має вигляд
 (2.38)
(2.38)
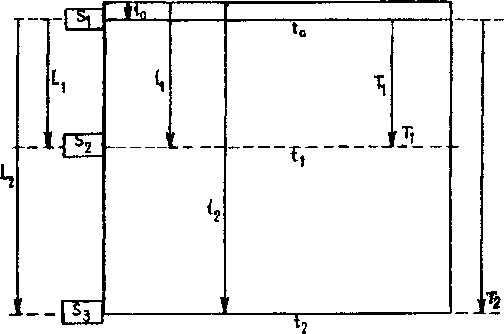
Несиметричний спосіб чотирьох статий
Рис
5 Несиметричний
спосіб чотирьох станцій
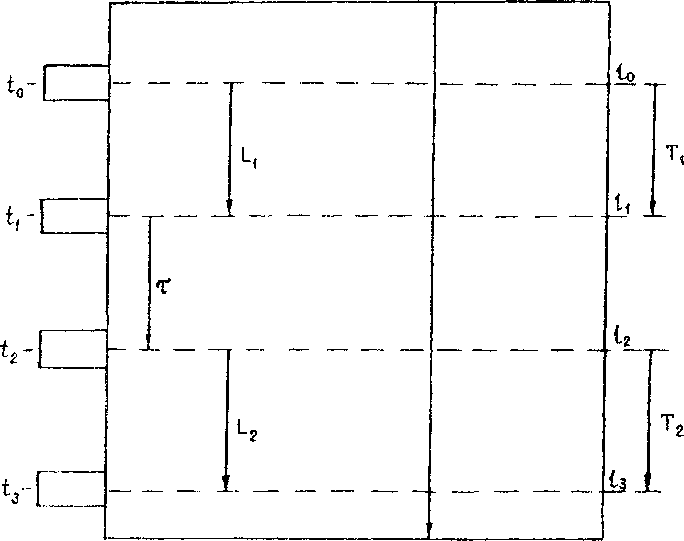

Шляхи L1 IL2так підібрані щоб тіло проходило їх за один і той же самий часt1-t0, t2-t0Різниця часy між моментами t2 іt1 позначена через τ , і її називають паузою в спостереженнях Як і в способі для трьох станцій можна записати такі очевидні три рівняння рухy
 (2.39)
(2.39)
 (2.40)
(2.40)
 (2.41)
(2.41)
Згідно з позначеннями на рис. 5 знайдемо
 ,(2.42)
,(2.42)
 ,
(2.43)
,
(2.43)
Тоді одержимо вираз для g0
 (2.44)
(2.44)
 Симетричний
спосіб двох станцій
Симетричний
спосіб двох станцій
Ідея цього способу полягає в тому, що фіксується проходження тіла через нерухомі горизонтальні площини двох станцій (див. рис. 6) спочатку при русі догори, а потім при русі вниз.
Шлях
І2
від нижньої станції до вершини траєкторії
за час
 і
шлях I1
і
шлях I1
від
верхньої станції до вершини траєкторії
за час
 відповідно дорівнюють
відповідно дорівнюють
 ,(2.45)
,(2.45)
 ,
(2.46)
,
(2.46)
Тоді
 ,
(2.47)
,
(2.47)
Звідси
 ,
(2.48)
,
(2.48)
aбо
 .
(2.49)
.
(2.49)