Поправка за густину навколишнього середовища
Навколишнє середовище, яке оточує маятник, значно впливає на його період коливання. Зміна періоду коливання є пропорційною до густини атмосфери і обумовлена такими причинами: зменшується вага маятника згідно з законом Архімеда, маса маятника збільшується за рахунок сили молекулярного тертя. А це приводить до зміни періоду коливання маятника і відповідно зміни сили ваги. Щоб одержати період коливання Т0 в безповітряному середовищі, в виміряний період Т вводять поправку
 (3.20)
(3.20)
де:
А’ -барометричний коефіцієнт маятника, який для півсекундного маятника А' =6 10-5.
(3.21)
Р - атмосферний тиск в мб,
f- тиск водяної пари в мб,
t- температура повітря в °С.
Якщо вимірювання виконують сучасними вакуумними маятниковими приладами, то зручно приводити результати спостережень до умовного сталого тиску Р0
(3.22)
де:
Р - залишковий атмосферний тиск в мб.
Барометричний коефіцієнт А для півсекундногокварцово-металічного маятника складає в межах ( 4-10 ) 10-8с/мб.
Поправка за частоту кварцового генератора
При вимірюваннях періоду коливання маятника використовують кварцовий годинник, а масштаб часу задається стандартом частоти кварцового генератора. Його частота не є сталою, а має віковий і періодичний хід. Якщо реальна частота f відрізняється від еталонно f0. то до виміряного періоду вводять поправку
 , (3.23)
, (3.23)
де
 (3.24)
(3.24)
Реальну частоту кварцового генератора порівнюють з еталонною за допомогою електронного осцилографа, тоді частоту генератора знаходять за допомогою фотоелектронного реєстратора. Стандарт частоти контролюють з точністю 2 10 -8 .
Поправка за співхитання штатива. Метод Венінга-Мейнеса
Штатив маятникового прилала деформується під тиском маятника. Тиск, направлений по лінії, яка перпендикулярна до осі підвісу і проходить через центр ваги маятника. Зміщення штатива, зумовлене вертикальною складовою тиску, при малих амплітудах можна вважати сталим. Горизонтальна складова змінюється від нуля до деякої величини при максимальному відхиленні маятника і завжди направлена в бік відхилення маятника. В результаті відбувається паралельне зміщення в горизонтальній площині осі підвісу і маятника в той та інший бік у такт коливанням маятника. Це явище називається співхитанням штатива. Для редукції виміряного періоду коливання Т до періоду Т0, коли штатив маятникового приладу є абсолютно стійким, вводять від'ємну поправку за співхитання штатива

(3.25)
Ідея цього методу полягає в тому, що на одній підставці здійснюють коливання в одній вертикальній площині два практично ізохронних маятники. Фотографічним методом реєструється різниця амплітуд і фаз цих маятників, які будуть вільними від збурюючих прискорень.Запишемо рівняння збуреного руху для двох маятників 1 і 2.

, (2.23) 36
, 36
, (2.24) 36
, 36
, 36
Звідки: 36
49
53
4
∆g=k(S2-S1). 14
де: 80
Залежність між зміною сили ваги і зміною відліку можна приблизно виразиш рівнянням квадратної параболи 83
12-призма. 90
3
Δg=g-γ0+0.3086Hγ (8 44) 149
Δg=g-[γ0-0.3086(Hγ-h)] (8 49) 150
2Пf(δ-δв)h (8.55) 152
де. 152
ΔgБ=Δgвп+2Пf(δ-δв) (8.56) 153
(3.26)
_
де:
 -горизонтальні
прискорення.
-горизонтальні
прискорення.
Припустимо,
що Т1
= Т2
і l1 =l2,
і позначимо через
 Тоді
Тоді

(3.27)
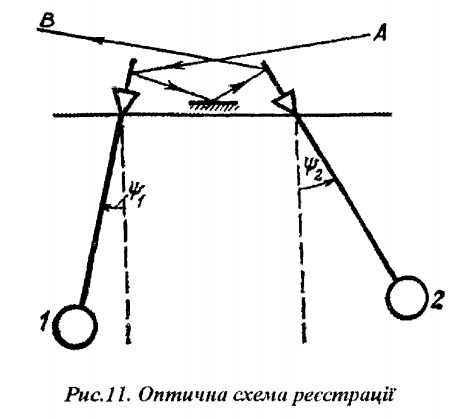
буде рівнянням незбуреного руху різницевого маятника, кут елонгації якого дорівнює ,тобто виключається вплив горизонтальних прискорень. Цей маятник називають фіктивним aбо неіснуючим. Кут елонгації фіктивного маятника реєструється з допомогою оптичної схеми (див. рис. 11).
Промінь світла від джерела А, відбившись від дзеркала маятника 1, падає на нерухоме дзеркало, на дзеркало маятника 2 і пізніше надходить до реєстратора В. Цей реєстратор фіксує незбурену синусоїду, за якою визначають період коливання фіктивного маятника.