

1.6. Динамические характеристики элементов
В реальных САУ сигналы, как правило, изменяются во времени и системы работают в динамическом режиме (x = x(t),
y = y(t)). Для оценки работы элементов в динамическом режиме используют динамические характеристики (частотную и переходную) и динамические параметры (например, постоянная времени элемента Т ).
Процесс перехода элемента из одного установившегося состояния в другое называется переходным процессом (частный случай динамического режима). Одним из важнейших динамических показателей элемента является его динамическая характеристика, то есть зависимость выходной величины от времени:
y=f(t) . (1.10)
Характер изменения выходной величины зависит от свойств самого элемента и от характера изменения его входной величины. Поэтому для сравнения динамических свойств разных элементов надо подавать на вход одинаково меняющиеся во времени сигналы. Реакция большинства элементов на скачкообразный входной сигнал (то есть переходная характеристика элемента ) представляет собой нарастающую экспоненту.
Входной сигнал имеет вид единичного скачка (рис. 1.4 ).


Рис. 1.4
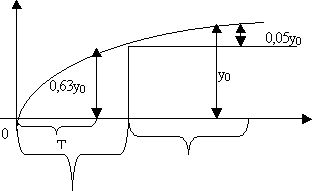
Переходная характеристика изображена на рис. 1.5, на котором используются также следующие обозначения у0 - установившееся значение выходной величины, Т - постоянная времени, которая определяет интервал времени, в течение которого выходной сигнал достигает 63 от установившегося
значения.
Чем меньше Т, тем круче будет график переходной характеристики, меньше длительность переходного процесса и меньше инерционность элемента, то есть элемент быстрее реагирует на изменение входного сигнала ( рис. 1.5 ).
Считается, что элемент находится в установившемся режиме, если значение выходной характеристики у отличается от установившегося значения у0 не больше чем на 5%.
Различные элементы автоматики имеют различные графики переходных процессов,


переходный режим установившийся режим
Рис. 1.5
При этом различают четыре основных вида переходных процессов.
Переходный процесс без запаздывания (рис. 1.6).
y
 t
t
Рис. 1.6
2. Апериодический переходный процесс (рис. 1.7).

t
Рис. 1.7
Степень инерционности переходного процесса оценивается постоянной времени Т. Величину Т можно определить по графику переходной характеристики как расстояние по оси t от начала координат до абсциссы точки пересечения касательной к кривой переходного процесса, построенной в точке начала координат с прямой у=ууст.
3. Колебательно - затухающий процесс, при котором значение у колеблется около установившегося значения с
постоянной частотой, равной 1 Т0, где Т0 - период колебаний с непрерывно убывающей амплитудой, tуст - интервал времени, в
течение которого выходной сигнал достигает значения, отличающегося от установившегося значения ууст не более чем на у. Величину tуст принято называть временем установления или длительностью переходного процесса.
4. Периодический переходный процесс, при котором амплитуда колебаний остаётся постоянной.
В любой момент времени t кривые выходного сигнала у(t) и входного сигнала х(t) имеют разность ординат.
Абсолютная динамическая погрешность элемента
= yуст-y(t) . (1.11)
У большинства элементов абсолютная динамическая погрешность после входного скачкообразного сигнала не остаётся постоянной, а стремится к некоторому достаточно малому значению. Момент времени, когда называется моментом окончания переходного процесса. Длительность переходного процесса обычно 3Т [1].