

Учебное пособие 800251
.pdf» step(h1)
получение переходной характеристики исходной следящей системы.
Определяем желаемые корни наблюдателя:
>> l=8*roots(h.den{1})
Формируем коэффициенты наблюдателя.
Для этого используют транспонированые матрицы a1, c1 и l. Сам вектор f также транспонируют :
>> f=acker(a1',c1',l)' .
Формируем векторно-матричное уравнение наблюдате-
ля:
>> est=estim(hh,f,[1],[1]).
Следящую систему задаем при помощи tf-функции.
LTI system (раздел Control System Toolbox)
моделирует наблюдатель, полученный в рабочей области -
объект est.
LTI объект имеет 1 вход и 1 выход, потому необходимо использовать мультиплексор и демультиплексор (Signal Routing). Mux на 2 входа, Demux на 4 выхода.
Коэффициенты модального регулятора К1, К2, К3 и К4
получены в разделе Следящая система с модальным регулятором.
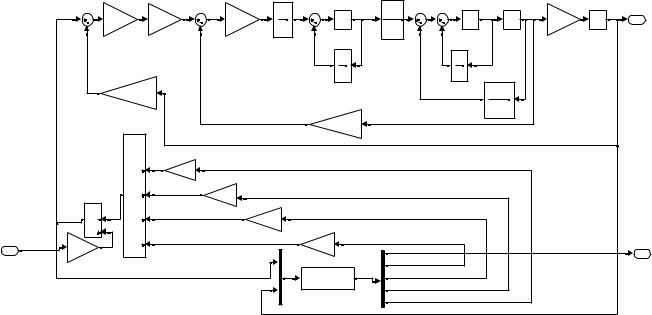
В Simulink реализуется структурная схема следящей системы с модальным регулятором и наблюдателем (рис. 29).
Выходами наблюдателя являются: Y- выходной сигнал системы;
X1координата перемещения (фактически выход системы Y);
X2-координата скорости;
X3-координата тока;
X4-координата напряжения.
71
|
Kpu1 |
220 |
Kpu2 |
Ky |
1/s |
Kd |
|
1/s |
1/s |
Kred |
1/s |
1 |
|
Ty |
Tm*Ta |
|
|||||||||
|
Gain5 |
Gain6 |
Gain8 |
Integrator |
Integrator1 |
Integrator3 |
Gain14 |
Integrator2 |
Out1 |
|||
|
Transfer Fcn |
|
Transfer Fcn2 |
Transfer Fcn3 |
|
|
|
|||||
|
Gain16 |
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
Ty |
|
Ta |
Transfer Fcn4 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
Kdp |
|
|
|
Transfer Fcn1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
Gain15 |
|
|
|
Tm*Ta |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ktg |
|
|
|
|
|
|
|
72 |
|
Gain1 |
|
|
|
|
|
|
|
|
|
|
|
K4 |
Gain2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k3 |
Gain3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k2 |
Gain4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
Kf |
|
|
|
K1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
In1 |
Gain9 |
|
|
|
|
|
|
|
|
|
|
Out2 |
|
|
|
|
??? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LTI System |
|
|
|
|
|
|
|
|
Рис. 29. Структурная схема электромеханической следящей системы |
с модаль- |
|
|||||||||
|
ным регулятором и наблюдателем. |
|
|
|
|
|
|
|
|
|||

ИССЛЕДОВАНИЕ СТРУКТУРНОЙ СХЕМЫ С МОДАЛЬНЫМ РЕГУЛЯТОРОМ,
НАБЛЮДАТЕЛЕМ И ФИЛЬТРОМ КАЛМАНА
Известно, что если на вход системы поступает случайный сигнал Y(t), являющийся стационарным, в широком смысле, случайным процессом, оптимальную матричную передаточную функцию W*(s) многомерного фильтра можно получить факторизацией рациональной матрицы спектральных плоскостей.
Р. Калман в своих работах модифицировал постановку задачи многомерной фильтрации Винера, придав ей форму проблемы пространства состояния.
В результате такой модификации был получен фильтр Калмана, осуществляющий процедуру рекурсивного оценивания, когда подлежащий оцениванию сигнал является входным сигналом линейной нестационарной динамической системы.
Пусть задана непрерывная модель объекта управления
dx(t)/dt = A*x + B*u +G*w yr = C*x + D*u + H*w + r
с известными входами u и возмущениями по входам w и измерениям r, которые являются "белым" шумом со следующими характеристиками:
73
Требуется выполнить синтез наблюдателя для оценивания вектора переменных состояния объекта, который минимизирует установившуюся ошибку оценивания
 .
.
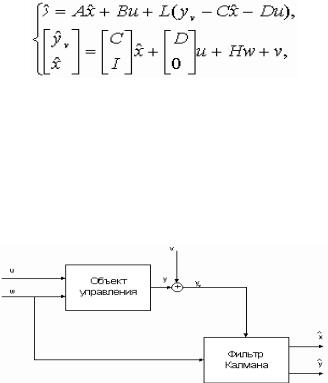
Оптимальным решением является фильтр Калмана, описываемый уравнениями
где матрица коэффициентов обратных связей L определяется на основе решения алгебраического матричного уравнения.
Например, при Н = 0 дисперсия P определяется из уравнения
AP + PAT - (PCT +GN)R-1(CP+NTGT) + GQGT = 0.
При этом матрица L – L = APCT(N+CPCT)-1.
Рис. 30. Наблюдатель Калмана
Наблюдатель (рис. 30) объединяет фильтр Калмана и объект управления; он использует известные входы u и результаты измерений yrv, искаженные случайными помехами.
74
Для электромеханической следящей системы исследует-
ся влияние помех в цепи обратной связи (датчика пере-
мещения) на качество регулирования переходной характеристики.
Фильтр Калмана предназначен для восстановления сигнала обратной связи из суммарного сигнала канала обратной связи с сигналом генератора шума.
Исследования приводятся в рабочей области программы. Задаем следящую систему с использованием матриц
векторно-матричного описания:
>>a1 = [];
>>b1 = [];
>>c1 = [];
>>d1 = 0.
Добавим в векторно-матричное уравнение следящей системы дополнительный вход для сигнала от генератора шума.
>>P=ss(a1,[b1 b1],c1,[d1 d1]).
Выбираем заданное значение коэффициента передачи сигнала от генератора щума.
Изменим знак коэффициента передачи сигнала шума (u2), так как при поступлении по каналу обратной связи он должен быть отрицательным:
>> b1(1,2)=-22/1.
Приступим собственно к синтезу самого фильтра
Калмана.
>> Kest=kalman(P,1,785).
Оценивается переходный процесс электромеханической следящей системы при наличии шума в канале обратной связи и переходной процесс, синтезированный с помощью фильтра Калмана.
75
Таким образом, использование фильтра Калмана, в
отличие от модального регулятора, способно полностью исключить влияние случайных помех в канале обратной связи.
Подключив выход фильтра Калмана вместо сигнала обратной связи по углу поворота в следящую систему получаем аналогичный переходной процесс.
Как видно из структурной схемы системы с фильтром Калмана, сигнал обратной связи с наложенным шумом поступает на вход фильтра Калмана, а его выход используется
в качестве сигнала обратной связи по |
углу поворота . |
|
||
При |
этом |
переходная |
характеристика |
в |
установившемся режиме имеет ровный характер, что и требуется по заданию.
Это перспективный способ избавления от помех, который практически не влияет на быстродействие системы.
На рис. 31 представлена структурная схема следящей системы с наблюдателем и фильтром Калмана.
76

|
Kpu1 |
220 |
Kpu2 |
Ky |
1/s |
Kd |
|
1/s |
1/s |
Kred |
1/s |
1 |
|
Ty |
Tm*Ta |
|
|||||||||
|
Gain5 |
Gain6 |
Gain8 |
Integrator |
Integrator1 |
Integrator3 |
Gain14 |
Integrator2 |
Out1 |
|||
|
Transfer Fcn |
|
Transfer Fcn2 |
Transfer Fcn3 |
|
|
|
|||||
|
|
Gain16 |
|
|
1 |
|
1 |
Transfer Fcn4 |
|
|
|
|
|
|
Kdp |
|
|
Ty |
|
Ta |
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|||
|
|
|
|
|
Transfer Fcn1 |
Gain15 |
|
|
|
|
|
|
|
|
|
|
|
|
Ktg |
|
|
Tm*Ta |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
77 |
|
|
|
|
|
|
|
|
Gain7 |
|
|
|
|
Gain1 |
|
|
|
|
|
|
Kdp |
|
|
|
|
|
|
K4 |
Gain2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k3 |
Gain3 |
|
|
|
|
|
|
|
Out3 |
|
|
|
|
|
|
|
|
??? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k2 |
Gain4 |
|
|
|
LTI System1 |
|
|
|
1 |
Kf |
|
|
|
K1 |
|
|
|
|
|
|
2 |
In1 |
|
|
|
|
|
|
|
|
|
|
|
|
Gain9 |
|
|
|
|
|
|
|
|
|
|
Out2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
??? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LTI System |
|
|
|
|
|
|
|
Рис. 31. Структурная схема следящей системы с наблюдателем и фильтром Калмана
ЗАКЛЮЧЕНИЕ
При выполнении курсового проекта проводится анализ результатов и делаются выводы по каждому разделу.
Используемый теоретический материал приводится для получения математического описания и математических моделей элементов электромеханической системы.
При выполнении курсового проекта приводятся полученные временные и частотные характеристики для анализа устойчивости и параметров качества регулирования исходной нескорректированной системы.
Описывается корневой метод проектирования последовательного корректирующего устройства для САР скорости с использованием rlt-функции программы Matlab.
Анализируется векторно-матричное описание системы и использование модального регулятора для достижения заданных показателей качества регулирования следящей системы.
При реализации цифрового модального регулятора задаются параметры блоков в дискретной форме и оценивается вид переходной характеристики.
При исследовании наблюдателя и фильтра Калмана оценивается вид переходной характеристики.
78
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Харченко, А. П. Теория автоматического управления линейных непрерывных систем [Текст] : учеб. пособие / А. П. Харченко, В. В. Кольцова. – Воронеж : ГОУВПО "Воронежский государственный технический университет", 2008. – 96 с.
2.Харченко А. П. Теория автоматического управления [Текст] : учеб. пособие / А. П. Харченко, В. В. Кольцова, О. В. Белоусова. – Воронеж: НОУВПО “Международный институт компьютерных технологий”, 2009. – 100 с.
3.Теория автоматического управления: методы исследо-
вания |
автоматических систем в среде Matlab [Текст] : |
учеб. |
пособие / А. П. Харченко, Ю. С. Слепокуров, В. В. |
Кольцова, О. В. Белоусова. – Воронеж: ГОУВПО "Воронежский государственный технический университет", 2012. – 201 с.
4.Методические указания к выполнению курсовой работы по дисциплине “Теория автоматического управления” для студентов специальности 220402 “Роботы и робототехнические системы” очной и очно-заочной форм обучения / ГОУВПО "Воронежский государственный технический университет"/ сост. А. П. Харченко, Ю. С. Слепокуров, А.К. Муконин. Воронеж, 2008. 29с.
5.Методические указания к выполнению лаборатор-
ных работ № 1– 4 |
по |
дисциплине |
“Теория |
автоматиче- |
|||
ского |
управления” для студентов направления 221000.62 |
||||||
“Мехатроника и |
робототехника”, профиль “Промышленная |
||||||
и специальная |
робототехника”, |
очной формы обучения |
|||||
/ ФГБОУ ВПО |
“Воронежский государственный технический |
||||||
университет”; |
сост. |
А.П. Харченко, |
Ю.С. Слепокуров, |
||||
В.В. Кольцова. Воронеж, 2012. 24 с. |
|
|
|||||
|
6. Методические указания к выполнению лаборатор- |
||||||
ных работ № 5– 8 |
по |
дисциплине |
“Теория |
автоматиче- |
|||
ского |
управления” |
для |
студентов |
направления |
|||
221000.62 “Мехатроника и робототехника” ( профиль “Промышленная и специальная робототехника”) очной фор-
79
мы |
обучения / ФГБОУ ВПО |
“Воронежский государствен- |
||||||||
ный технический университет”; |
сост. |
А.П. Харченко, |
||||||||
Ю.С. Слепокуров. Воронеж, 2013. 30 с. |
|
|
|
|
||||||
|
7. Методические указания к выполнению лаборатор- |
|||||||||
ных работ № 9 – 13 по |
дисциплине |
“Теория |
автомати- |
|||||||
ческого |
управления” |
|
для |
студентов |
направления |
|||||
221000.62 “Мехатроника |
и робототехника” ( профиль “Про- |
|||||||||
мышленная и специальная робототехника” ( |
очной |
фор- |
||||||||
мы |
обучения / ФГБОУ ВПО |
“Воронежский государствен- |
||||||||
ный технический университет”; |
сост. |
А.П. Харченко, |
||||||||
Ю.С. Слепокуров. Воронеж, 2013. 33 с. |
|
|
|
|
||||||
|
8. Методические указания к выполнению практиче- |
|||||||||
ских занятий № 1 – 9 по |
дисциплине |
“Теория |
автомати- |
|||||||
ческого |
управления” |
для студентов направления 15.03.06 |
||||||||
“Мехатроника |
и робототехника” (профиль “Промышленная |
|||||||||
и |
специальная |
робототехника” ) очной формы |
обуче- |
|||||||
ния / ФГБОУ ВПО |
“Воронежский государственный техни- |
|||||||||
ческий университет”; |
сост. А.П. Харченко, |
|
Ю.С. Сле- |
|||||||
покуров. Воронеж, 2016. 33 с. |
|
|
|
|
|
|||||
80