

Учебное пособие 800251
.pdfУменьшение коэффициента Кпу1 сохраняет форму апериодической переходной характеристики 2-го порядка, но время регулирования возрастает.
Увеличение коэффициента Кпу1 изменяет форму апериодической переходной характеристики 2-го порядка на колебательную, но время регулирования уменьшается.
Step Response
From: In1 To: Out1
|
14 |
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
Amplitude |
8 |
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
|
0 |
|||||||
|
|
|
|
Time (sec) |
|
|
|
|
Рис. 9. Переходные характеристики СС при изменении
Кпу1
При сохранении формы переходной характеристики СС, уменьшение времени регулирования при использовании П-регулятора невозможно, так как существует зависимость времени регулирования и перерегулирования от изменения коэффициента регулятора.
Уменьшение времени регулирования СС может быть получено при использовании модального регулятора (МР).
41
При использовании МР исходная СС настраивается с использованием П-регулятора на заданную форму переходной характеристики.
При исследовании САР скорости и СС в среде Matlab применяются следующие команды.
Формирование матриц:
>> [a,b,c,d]=linmod('файл').
Формирование векторно-матричного уравнения:
>> h=ss(a,b,c,d).
Передаточная функция САР скорости или СС:
>> h1=tf(h).
Переходная характеристика САР скорости или СС:
>> step(h1).
Так же определяется передаточная функция по позиционной ошибке εуст1 для САР скорости.
Коэффициент позиционной ошибки Со определяется по передаточной функции в tfформе:
С0 = b0 / a0.
Относительное значение позиционной ошибки:
(εуст1 / hуст) * 100%.
Коэффициент скоростной ошибки С1 определяется:
С1 = b1 / a0.
Скоростная ошибка:
εуст2 = 1(t) * C1.
42
Рассмотрим отработку угла поворота СС.
В данном случае исследуется реакция системы на
линейный сигнал управления.
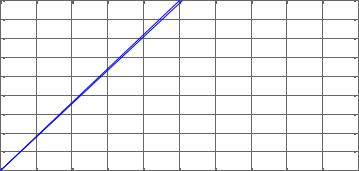
На рис. 10 представлен пример временных диаграмм сигнала на входе, а также сигнала на выходе системы, являющийся реакцией систем на управляющее воздействие.
На графике видно, что СС отрабатывает заданный сигнал с некоторой задержкой.
Amplitude
180 










160
140
120
100
80
60
40
20
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
1.4 |
1.6 |
1.8 |
2 |
0 |
Time (sec)
Рис. 10. Отработка системой управления угла поворота
КОРРЕКЦИЯ САР СКОРОСТИ
Коэффициент передачи в САР скорости Кпу2 для обеспечения заданной скорости должен быть постоянный.
Используется корректирующее устройство с коэффициентом передачи К = 1.
Рекомендуется простейшее корректирующее устройство
W (s) |
Т1s 1 |
|
H |
ку |
(s) |
s z1 |
|
ку |
Т2s 1 |
|
|
s p1 , |
|||
|
|
|
|
||||
где Т1, Т2 – постоянные времени; z1 = -1/Т1, р1 = -1/Т2 – корни числителя и знаменателя.
43
Переходная характеристика САР скорости должна иметь заданное перерегулирование σзад и установившееся значение hуст, равное номинальной частоте вращения двигателя nном.
На входе структурной схемы САР скорости, исследованной ранее в области Simulink, был установлен блок, коэффициент передачи которого равен 220 ( подача номинального напряжения на двигатель).
При размыкании обратной связи в структурной схеме САР скорости с настройкой по переходной характеристике hуст = n, заданной в области Simulink, определяется передаточная функция прямой цепи разомкнутой системы ( без блоков Gain c К = 220 и датчика скорости Kds).
>> hr = tf(h).
В рабочей области задаются следующие команды:
>>c = tf(1) >>h = tf(Kds) >>f = tf(220) >>g = hr.
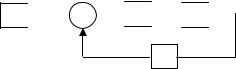
Вызывается модель для построения корневого годографа, изображенной на рис. 11, следующей командой
>>rltool.
F 

 C
C 
 G
G 
-
H
Рис. 11. Модель для построения корневого годографа
В окне SISO Design используется окно – операция import и переносятся данные модели с рабочей области.
44
Вокне SISO Design используется окно - открытая петля Боде и окно - анализ.
Вокне LTI отображается переходная характеристика исходной системы регулирования скорости.
Вокне SISO Design перенести нуль (о) и полюс (х) на плоскость графика Боде или на плоскость распределения корней характеристического уравнения , наблюдая за окном
LTI, где должны быть отражены обозначенные параметры качества регулирования время регулирования tр и перерегулирование σ.
Вокне SISO Design отображается при получении задан-
ного перерегулирования σ передаточная функция корректирующего устройства (компенсатор С).
Если ставится задача получения заданного времени регулирования и заданного перерегулирования, то подбор вручную параметров качества регулирования путем размещения полюсов и нулей, не эффективен. Заходим на вкладку «Automated Tuning». Обращаем внимание на выбор метода (Design Method), который по умолчанию находится в состоянии
«Optimization Based Tuning». Именно этот способ позволяет подбирать параметры регулятора для заданной структурной схемы и получения параметров качества.
Нажимаем кнопку «Optimize Compensators» и открыва-
ется еще одна вкладка – «Response Optimization», основное назначение которой – задание параметров требуемого качества управления и определение настраиваемых параметров регулятора. При этом в главное окно инструментальной панели добавляется еще одно дочернее окно – «Response Optimization» с четырьмя вкладками: «Overview», «Compensators», «Design requirements» и «Optimization».
Открываем вкладку «Compensators» и определяем параметры регулятора, подлежащие поиску. В нашем случае это «Real Pole» и «Real Zero». Если параметры регулятора выбраны не случайно, а в результате предварительного расчета, то
45
нажимаем кнопку «Use Value as Initial Guess», которая делает эти значения начальными для поиска.
Теперь открываем вкладку «Design requirements» и на-
жимаем кнопку «Add New Design requirement»:
Это наиболее ответственный шаг оптимизации, так как от него во многом зависит, будет ли найдено решение. Суть параметров этого окна – границы желаемого переходного процесса.
Так как мы не меняем коэффициент передачи, то уста-
новившееся значение переходной характеристики (Final Value) , как в исходной системе – hуст. «Rise Time» - время нарастания – время, за которое переходная характеристика первый раз достигает значения 80 % от установившегося. Вы можете поменять его на более стандартное для теории автоматического управления значение равное 95 %.
Следующий этап – задание времени переходного процесса (Setting Time). Задаем значение 2 секунды. Справа, в поле %Setting ставим значение 2 или 5 (зона определения времени переходного процесса). Значение по умолчанию – 1%, часто приводит к отсутствию приемлемого решения.
Последняя строка – (%Overshoot и %Undershoot) – зада-
ние величины перерегулирования и спада на первом колебании. Задаем их на уровне 10% и 2% соответственно. В результате получаем следующее окно:
После окончания ввода и нажатия «ОК» в окне переходной характеристики появится график с определенными
Constraint границами:
Далее можно зайти на вкладку «Optimization», где можно изменить параметры поиска решения, если вы обладаете соответствующими знаниями в этой области. В простейшем случае – доверьтесь настройкам системы и просто нажмите кнопку «Start Optimization». мните о том, что система ищет решение, наиболее близкое к тому, что вы задали параметра-
ми, поэтому может пропустить «почти» подходящие реше-
ния и выдать информацию о том, что решение не найдено.
46

Полученная при ручном поиске передаточная функция полученного корректирующего устройства переносится в
рабочую область Matlab и представляется в tf - форме и zpk
- форме.
При коррекции путем размещения полюса p1 и нуля z1 на плоскость распределения корней для получения по переходной характеристике заданного перерегулирования σ при сохранении значения hуст = n [об/мин] необходимо обращать внимание на значения коэффициента С = 1.
Представляется переходная характеристика САР скорости с заданным перерегулированием σ и измеренным временем регулирования tp.
Дополнительно по переходной характеристике скоррек-
тированной САР скорости определяются следующие параметры качества регулирования:
tс – время первого согласования с установившемся значением;
tн – время нарастания на участке от 0% до 50 % установившегося значения;
Представляется импульсная переходная характеристика САР скорости с указанием wмак и времени спада tсп.
Реализация последовательного корректирующего устройства на активных четырехполюсниках представляется в виде
C1 
 R2
R2
C2
R1
Для корректирующего устройства рассчитываются параметры RC – цепей, исходя из полученных значений постоянных времени Т1 и Т2.
Передаточная функция активного четырехполюсника определяется
47
Wку(s) = Zос(s) / Zвх (s),
где Zвх(s) , Zос(s) - операторы входного сопротивления и сопротивления обратной связи.
На операционном усилителе реализована передаточная функция вида
W (s) = K( T1 s + 1) / ( T2 s + 1),
где Т1 = R1C1, Т2 = R2C2 – постоянные времени форсирующего и апериодического типовых динамических звеньев; K – коэффициент передачи.
Такая передаточная функция может быть получена при задании параметров электрических цепей Zвх (s) в виде параллельного соединения R1 и 1/sC1, а Zос(s) в виде параллельного соединения R2 и 1/sC2.
При этом коэффициент передачи активного четырехполюсника K = R2/R1. Представляется схема корректирующего устройства и параметры RC – цепей.
В структурную схему САР скорости, заданной в области Simulink, вводится полученное корректирующее устройство с передаточной функцией Wку(s) (устанавливается после предварительного усилителя ПУ2 в составе БРП).
Исследуется структурная схема СС с скорректированной САР скорости и, изменяя параметры Кпу1, получается апериодическая 2-го порядка переходная характеристика. Выбирается переходная характеристика, перерегулирование которой должно быть на границе с колебательной переходной характеристикой при σ = [%].
Представляется переходная характеристика СС с полученным временем регулирования tp.
48
ИССЛЕДОВАНИЕ ЧУВСТВИТЕЛЬНОСТИ САР СКОРОСТИ К ПАРАМЕТРАМ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Для скорректированной структурной схемы САР скорости оценивается влияние отклонения выбранных параметров КУ постоянных времени Т1 или Т2 на переходную характеристику.
Оценка проводится для трех структурных схем, где задаются параметры постоянных Т1, (Т1+ΔТ1), (Т1– Т1) или
Т2, (Т2+ΔТ2), (Т2– Т2). Отношение Т1/Т1 или Т2/Т2 - 0.2.
ИССЛЕДОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ С МОДАЛЬНЫМ РЕГУЛЯТОРОМ
Известно, что динамические свойства технической системы определяются, главным образом, ее полюсами, т.е. корнями ее характеристического уравнения, или собственными числами матрицы А.
Так, необходимым и достаточным условием устойчивости линейной системы является нахождение ее полюсов в левой полуплоскости комплексных чисел.
От взаимного расположения этих полюсов и зависит характер переходных процессов в системе.
Исходная нескорректированная линейная стационарная техническая система описывается уравнением состояния:
dх/dt = А*х + В*u.
Желаемое расположение полюсов р передаточной функции на комплексной плоскости может быть обеспечено введением так называемой линейной обратной связи по состоянию, уравнение которой можно записать следующим образом:
U = V – К*Х,
49
где V – это новое обозначение вектора входных (задающих) воздействий; К – матрица обратной связи.
Если V – скаляры, то К является матрицей-строкой, элементы которой представляют собой коэффициенты обратных связей по всем составляющим вектора Х.
Исходная система и линейная обратная связь по состоянию образуют замкнутую техническую систему, то есть автоматическую систему (систему автоматического управления или систему автоматического регулирования) с так называе-
мым модальным регулятором.
Уравнение замкнутой системы получается объединени-
ем выше приведенных уравнений |
и представляется |
выражением |
|
dх/dt = Ах + В(V – К*х) = А*х + ВV – В*К*х.
Окончательно получим уравнение состояний системы с модальным регулятором
dх/dt = ( А – В*К )*х + В*V.
Модель электромеханической следящей системы в переменных состояния можно получить двумя путями:
-использую дифференциальные уравнения;
-использую структурную схему.
Основным элементом схемы моделирования является интегратор. Если выход интегратора обозначит чере x(t), то его входом должна быть первая производная dx(t)/dt.
На рис. 12 представлена структурная схема следящей системы с доступом к переменным состояний.
Переменными состояний структурной схемы следящей системы с модальным регулятором являются следующие сигналы:
50