

Учебное пособие 800251
.pdfпеременная состояний Х1 =У (угловое перемещение
φвр);
переменная состояний Х2 = dХ1/dt (скорость вращения
ωвр);
переменная состояний Х3 = dХ2/dt (ток якоря двигателя
Iн);
переменная состояний Х4 = dХ3/dt (напряжение усилителя мощности Uн).
На первом этапе исследуется структурная схема следящей системы без модального регулятора ( выход модального регулятора отключен от входа системы) и определяются корни характеристического уравнения следящей системы.
На втором этапе выбирается требуемые корни характеристического уравнения системы в соответствии с заданными показателями качества регулирования, а именно времени регулирования.
Уменьшение времени регулирования обратно пропорционально увеличению корней.
На третьем этапе формируются коэффициенты передач К1,К2,К3 и К4 модального регулятора по переменным со-
стояний Х1, Х2, Х3, Х4.
На четвёртом этапе в структурную схему вводится модальный регулятор с выбранными коэффициентами передачи.
На пятом этапе исследуются переходные характеристи-
ки по всем Путём неоднократного изменения корней характеристического уравнения системы осуществляется по-
втор всех этапов исследования до тех пор, пока не будут достигнуты показатели качества регулирования по переменной
Х1=Y.
Для исследований используется в рабочей области MATLAB следующая последовательность команд:
»[a,b,c,d] =linmod(‘имя файла исходной структурной схемы’);
»h=ss(a,b,c,d); »step(h).
51
52
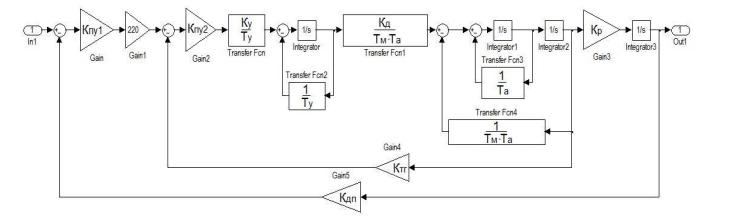
Рис. 12. Структурная схема следящей системы с доступом к переменным состояний
В этом случае выводится переходная характеристика системы без модального регулятора.
При задании команды:
»pole(h)
выводятся значения корней характеристического уравнения четвертого порядка s1 s2 s3 s4.
При задании команды:
»p=[s11 s22 s33 s44]
формируются требуемые корни характеристического уравнения.
При задании команды:
»acker(a,b,p)
формируются значения коэффициентов К1, К2, К3, К4 усилителей, входящих в состав модального регулятора.
При подключении модального регулятора с полученными коэффициентами выводится переходная характеристика.
Особенностью исследования при задании структурных схем в области Simulink является то, что при исследовании системы в рабочей области Matlab матрицы А, В, С и D не соответствуют матрицам исходной системы.
Структурная схема системы с доступом к переменным состояний используется для получения уравнений в матричновекторной форме:
Уравнения, связывающие координаты состояний:
dX1/dt = 0 ∙ X1 + Кред ∙ X2 + 0 ∙ X3 + 0 ∙ X4;
dX2/dt = 0 ∙ X1 + 0 ∙ X2 + 1 ∙ X3 + 0 ∙ X4;
dX3/dt = 0 ∙ X1 – (1/Tм ∙ Тя) ∙ X2 – (1/Тя) ∙ X3 – (Кд/Tм ∙ Тя) ∙ X4;
dX4/dt = – (Кдп ∙ Кпу1 ∙ 220 ∙ Кпу2 ∙ Ку/Ту) ∙ X1 – (Ктг ∙ Кпу2 ∙ Ку/Ту) ∙ X2 + 0 ∙ X3 –
– 1/Ту ∙ X4 + (Кпу1 ∙ 220 ∙ Кпу2 ∙ Ку/Ту) ∙ U; Y = 1 ∙ X1 + 0 ∙ X2 + 0 ∙ X3 + 0 ∙ X4 .
Получены матрицы векторно-матричного уравнения СС:
53
|
|
|
|
0 |
|
|
|
|
|
|
|
КРЕД |
|
|
|
|
|
0 |
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
КД |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т Т |
|
|
|
|
Т |
Т Т |
|||||||||
|
|
|
|
|
|
|
КУ |
|
|
|
|
М |
Я |
|
КУ |
|
Я |
М Я |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||
К |
К |
|
220К |
|
|
|
|
К К |
|
|
|
|
|
0 |
|
|
|
|
|
|||||
|
Т |
|
|
|
|
Т |
|
|
||||||||||||||||
|
ДП |
ПУ1 |
|
ПУ2 |
|
|
|
|
ТГ ПУ2 |
|
|
|
|
|
Т |
|||||||||
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
У |
|
|
|
|
У |
, |
||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
ПУ 1 |
|
220 |
К |
ПУ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
Т У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|||
C 1 |
|
0 0 0 , |
D 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В рабочей области Matlab |
задаются матрицы исход- |
|||||||||||||||||||||||
ной электромеханической следящей системы: |
|
|
|
|
|
|
|
|||||||||||||||||
»A1=[0 |
Kp |
0 |
0;0 0 |
|
1 |
0;0 |
|
|
-1/(Tm*Ta) |
-(1/Ta) |
||||||||||||||
+(Kd/(Tm*Ta));
-(Kdp*Kpu1*220*Kpu2*(Ky/Ty)) –(Kds*Kpu2*(Ky/Ty)) 0 --(1/Ty)]
»B1=[0;0;0; Kpu1*220*Kpu2*(Ky/Ty)] »C1=[1 0 0 0];
» D1=[0].
Формируется векторно-матричное уравнение следящей системы:
54
»h1=ss(A,B,C,D).
Просматриваются корни системы:
»pole(h).
Корни s11 s22 s33 s44 для уменьшения времени регулирования tp увеличиваются в 2-3 раза относительно кор-
ней s1 s2 s3 s4.
Выбираются требуемые корни следящей системы для переходного процесса:
»p=[s11 s22 s33 s44].
Формируется матрица корней модального регулятора:
»K=acker(А1,В1,p).
Определяется приращение матрицы системы при под-
ключении модального регулятора к системе: |
|
|
||||||
»dA=[0 |
0 |
0 |
0;0 |
0 |
0 |
0;0 |
0 0 |
0;- |
220*K*Kdp*Kpu1*Kpu2*Ky/Ty],
»A1=A+dA,
»B1=B, »C1=[1 0 0 0], »D1=[0].
Определяется матрица электромеханической следящей системы с модальным регулятором и просматриваются переходные характеристики составляющих управляемого вектора состояний:
»sys=ss(A1,B1,C1,D1);
»sys1=augstate(sys); »step(sys1).
При проектировании следящей системы с МР особенностью является чувствительность переходной характеристи-
ки к изменению коэффициентов МР.
Изменение коэффициентов К1, К2, К3 и К4 МР влияет на время регулирования и перерегулирование.
55
Сказывается изменение |
коэффициентов К1, К2, К3 на |
||||||||||||
относительное изменение перерегулирования σ/σо и |
отно- |
||||||||||||
сительное изменение времени tp/tpo. |
|
|
|
|
|
|
|||||||
При этом |
tpo - время регулирования переходного про- |
||||||||||||
цесса в исходной структурной схеме следящей системы с мо- |
|||||||||||||
дальным регулятором, а |
tp - время |
|
переходного процесса в |
||||||||||
структурной схеме следящей системы |
с доступом к перемен- |
||||||||||||
ным состояний с измененными значениями параметров |
мо- |
||||||||||||
дального регулятора. |
|
|
|
|
|
|
|
|
|
||||
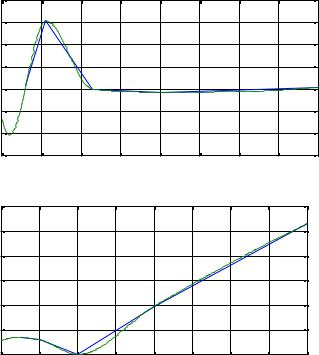
Графики зависимостей tp/tpo = |
F (К1), tp/tpo = |
|
F (К2), |
||||||||||
tp/tpo = |
F (К3) представлены на рис. 13-15 |
|
|
|
|
|
|||||||
. |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
. |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
tp/tp0 |
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.5 |
|
5 |
10 |
15 |
20 |
|
25 |
30 |
35 |
|
40 |
|
|
0 |
|
|
|
|
||||||||
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
Рис. 13. |
График зависимости |
tp/tpo = |
F (К1) |
|
|
|
||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
tp/tp0 |
2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0.005 |
0.01 |
0.015 |
0.02 |
0.025 |
0.03 |
0.035 |
0.04 |
|
|||
|
0 |
|
|||||||||||
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|
Рис. 14. |
График зависимости |
tp/tpo = |
F (К2) |
|
|
|
||||||
|
|
|
|
|
|
56 |
|
|
|
|
|
|
|

|
2.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
tp/tp0 |
1.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.6 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.8 |
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1 |
||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
K3 |
|
|
|
|
|
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x 10 |
|
|
|
Рис. 15. |
График зависимости |
tp/tpo = |
F (К3) |
||||||||
|
|
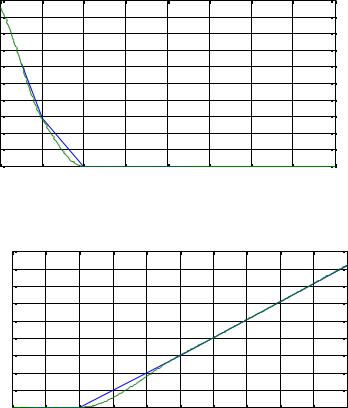
Графики зависимостей σ/σо = |
F (К1), |
σ/σо = |
F (К2), |
|||||||||
σ/σо = |
F (К3) представлены на рис. |
16-18. При этом |
σо - пе- |
|||||||||||
регулирование переходного процесса в исходной структурной |
||||||||||||||
схеме с МР, а |
σ - перегулирование |
переходного процесса в |
||||||||||||
структурной схеме |
с доступом к переменным состояний с из- |
|||||||||||||
мененными значениями параметров МР. |
|
|
|
|
||||||||||
|
|
2000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
sigma/sigma0 |
1200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
5 |
10 |
15 |
20 |
|
25 |
30 |
|
35 |
40 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
Рис. 16. График зависимости σ/σо= |
|
F (К1) |
||||||||
|
|
|
|
|
|
|
|
57 |
|
|
|
|
|
|
|
2000 |
|
|
|
|
|
|
|
|
|
|
|
1800 |
|
|
|
|
|
|
|
|
|
|
|
1600 |
|
|
|
|
|
|
|
|
|
|
|
1400 |
|
|
|
|
|
|
|
|
|
|
sigma/sigma0 |
1200 |
|
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
800 |
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0.005 |
0.01 |
0.015 |
|
0.02 |
0.025 |
0.03 |
0.035 |
0.04 |
|
|
0 |
|
|||||||||
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
Рис. 17. |
График зависимости σ/σо= |
F (К2) |
|||||||
|
900 |
|
|
|
|
|
|
|
|
|
|
|
800 |
|
|
|
|
|
|
|
|
|
|
|
700 |
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
sigma/sigma0 |
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1 |
|
0 |
||||||||||
|
|
|
|
|
|
K3 |
|
|
|
|
x 10-3 |
Рис. 18. График зависимости σ/σо = F (К3)
Графики зависимости параметров качества регулирования (времени регулирования и перерегулирования ) от значения полученных коэффициентов МР показывают, в каких пределах можно изменять при программной реализации
коэффициенты К1, К2 и К3, что бы параметры не отличались существенно от полученных.
58

На рис. 19 представлены переходные процессы по всем переменным состояний X1, X2, X3, X4 электромеханической следящей системы.
Рис. 19. Переходные процессы по всем переменным состояний электромеханической следящей системы:
h1(t) соответствует выходной координате, то есть пере-
мещению;
h2(t) соответствует скорости вращения; h3(t) соответствует току двигателя;
h4(t) соответствует напряжению на двигателе.
59
РЕАЛИЗАЦИЯ ЦИФРОВОГО МОДАЛЬНОГО РЕГУЛЯТОРА
В качестве исходной системы берется аналоговая электромеханическая следящая система с рассчитанным
модальным регулятором.
Модель исследования представляет собой цифровой модальный регулятор, представленный с помощью блоков библиотеки Fixed-Point Blockset.
Методика разработки модели с использованием блоков библиотеки Fixed-Point (Matlab 7.10.) следующая.
Для задания точности представления выходной величины каждого из математических блоков необходимо измерить все входящие в дискретную модель величины для определения диапазона их изменения.
Это можно сделать по переходным характеристикам переменных состояний.
На входе и выходе дискретного исчисления, т.е. дискретного представления модального регулятора, необходимо ставить блоки, переводящие непрерывный импульс в дискретный.
Одним из таких блоков является Data Type Conversion
–параметры на рис. 20-21.
Внем указываются:
выходная величина, которую принимаем за туже, что и входная: Output data type mode: Specify via dialog или double. Это зависит от того, где стоит этот блок: в начале дискретных преобразований (Specify via dialog) или в конце
(double).
разрядность выходной величины: в нашем случае sfix(8)
или sfix(16);
точность представления числа в выбранной разрядности микропроцессора.
Здесь необходимо сделать некоторые расчеты.
60