

Учебное пособие 800251
.pdfСтатическая точность электромеханической следящей системы определяется величиной обратной ошибкой.
Выражение установившейся ошибки САУ в операционной форме
ε(s) = (Со + C1 s + C2 / 2 s² + ….) x(s),
где ε(s) – изображение установившейся ошибки системы; x(s)
–изображение входного воздействия; Со – коэффициент позиционной или статической ошибки; С1 – коэффициент скоростной ошибки; С2 – коэффициент ошибки по ускорению.
Коэффициенты ошибок определяют по формулам разложения передаточной функции ошибки Wεg (s) в ряд Тейлора
Со = |Wεg (s)| ; C1=|dWεg (s) /ds| |
; |
С2=| d²/Wεg (s) /ds²| . |
s=0 |
s=0 |
s=0 |
Если передаточная функция Wεg(s) является дробно– рациональной функцией, то ее разложение в ряд можно получить делением числителя на знаменатель, располагая члены полиномов в порядке возрастания степеней.
Wεg (s) = (bo s + b1 s + …+ bm) / (ao s + a1 s + …+am).
При этом коэффициенты ошибок для любой САУ определя-
ются соотношением коэффициентов числителя bi и знаменателя ai. Переходя от изображений к оригиналам, получим выражение
для ошибки
ε (t) = Со (t) x(t) + C1 d x(t) / dt + C2 / 2 d² x(t) / dt².
В зависимости от закона изменения входного сигнала x(t), можно исследовать только позиционную, позиционную и скоростную или все три составляющие ошибки.
11
При обозначении амплитуды входного сигнала ступенчатой функции Xo(K1), скорости изменения входного сигнала K2 и ускорения входного сигнала K3 получим следующие выражения.
Постоянный входной сигнал с амплитудой
x(t) = Xo = К1*1(t).
Входной сигнал, изменяющийся с постоянной скоростью
g(t) = К2* t.
Входной сигнал, изменяющийся с постоянным ускоре-
нием
g(t) = К3*t ²/ 2.
Получим выражения для ошибок при типовых входных сигналах.
Для постоянного входного сигнала
ε (t) = K1*Со = Xo*Co .
Для входного сигнала, изменяющегося с постоянной скоростью
ε (t) = Со*K1* t + C1*K2.
Для входного сигнала, изменяющегося с постоянным ускорением
ε (t) = Со*К1*t ²/ 2 + C1*К2*t + C2*К3.
12
Системы, в зависимости от наличия составляющих ошибки ε(t), подразделяются на статические или астатические (системы с астатизмом первого, второго порядков).
Астатизм системы определяется структурной схемой и передаточной функцией.
Электромеханическая следящая система – автомати-
ческая система с астатизмом 1-го порядка.
Динамическая ошибка электромеханической следящей системы Δφдин представляет собой разность между условным угловым положением задающего устройства и положением
выходного вала редуктора при произвольном законе изменения входного задающего сигнала.
Ошибка в установившемся режиме при постоянном задании изменяющего временного входного сигнала зависит от коэффициента передачи разомкнутой электромеханиче-
ской следящей системы.
Отношение угловой скорости вращения входного вала системы к установившемуся значению скоростной ошибки εск носит название добротности системы по скорости К:
εск = Ωвх/К.
Динамическая ошибка должна быть либо одного порядка со значением основной ошибки – ошибки датчика, либо меньше её даже в тех случаях, когда ошибка датчика составляет угловые минуты или секунды.
При расчете всех составляющих суммарной ошибки
(скоростная ошибка и ошибка по ускорению) электроме-
ханической следящей системы учитывают, что суммарная по-
грешность состоит из статической εст и динамической εдин
ошибок.
Существующие методы уменьшения составляющих ошибки системы оказывают влияние на значение установив-
шееся ошибки.
13
В следящих автоматических системах закон измене-
ния заданного значения управляемого выходного сигнала заранее не известен и определяется функцией, произвольно изменяющейся во времени.
Задача управляющего устройства (регулятора) состо-
ит в том, чтобы с заданной ошибкой, обратной величине точности, обеспечить слежение управляемого выходного сигнала за изменением управляющего входного сигнала.
Таким образом, в следящих автоматических системах, алгоритм функционирования неизвестен.
Алгоритм функционирования автоматической систе-
мы это изменение управляемого выходного сигнала с заданной ошибкой в соответствии с функцией времени, определяемой управляющим сигналом:
Y(t) = F{x(t)},
где F — функция от временного входного сигнала.
Таким образом, следящая автоматическая система, как и любая программная система, воспроизводит входной, например, временной сигнал.
Однако это воздействие в следящей системе изменяется не по заранее заданной программе, а произвольно.
Автоматические системы, в которых заданное значе-
ние управляемого выходного сигнала заранее не определено и зависит от входного сигнала, произвольно изменяющегося во времени, называют следящими системами.
Следящие системы в теории автоматического управления являются одной из разновидностей систем автоматического управления (САУ).
Поэтому на них распространяется принятое деление систем автоматического регулирования — по назначению, в зависимости от характера входного сигнала и типов применяемых элементов.
САУ бывают трех видов: 14
системы автоматической стабилизации (регулируемый параметр поддерживается на одном заданном уровне);
системы программного регулирования (регулируемый параметр изменяется по заданной программе);
следящие системы (регулируемый параметр изменяется в зависимости от какой-либо другой величины или ряда других величин, закон изменения которых заранее неизвестен).
Следящая система используется для управления пере-
мещением звеньев манипулятора промышленного робота.
Следящие системы обеспечивают изменение положения захватным устройством манипулятора промышленного робота, при определенном угловом или линейном перемещении звеньев манипулятора.
При этом ошибка при перемещении конечного звена манипулятора, то есть и захватного устройства, определяется параметрами качества управления для следящих систем всех звеньев манипулятора промышленного робота.
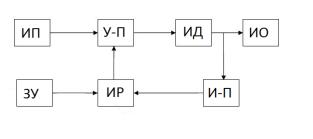
На рис. 1 представлена блок-схема следящей системы.
Рис. 1. Блок-схема следящей системы
Основные элементы следящей системы следующие.
ЗУ – задающее устройство. Вырабатывает маломощный входной сигнал, произвольно меняющийся по времени. Этот сигнал может задаваться в виде угла поворота входного вала, перемещения или напряжения.
И-П – измерительный преобразователь. Измеряет фактическое значение воспроизводимой величины на управляемом объекте и преобразует его в управляющий сигнал.
15
ИР – измеритель рассогласования - орган сравнения, сравнивающий фактическое значение воспроизводимой величины с заданным входным сигналом.
Взамкнутой следящей системе вырабатывается сигнал управления, пропорциональный разности между заданным и фактическим значением воспроизводимой величины.
У-П – преобразователь (при необходимости) и усилитель, усиливающий сигнал до уровня, достаточного для управления исполнительным двигателем ИД.
ИД – электрический двигатель, преобразующий управляющее напряжение в механическое перемещение вала (угловую скорость) и жестко связанный с исполнительным органом (нагрузкой) .
С валом электрического двигателя связан рабочий орган управляемого объекта. Двигатель осуществляет такое движение управляемого объекта, при котором сигнал рассогласования уменьшается.
Вотсутствие сигнала рассогласования ротор электродвигателя находится в покое. Таким образом, двигатель исполняет управляющие команды.
Электродвигатель, используемый в следящем электро-
приводе, называют исполнительным двигателем. ИО – ис-
полнительный орган, нагрузка, управляемый объект. То есть орган, который должен вращаться, поворачиваться или перемещаться в полном соответствии с входным сигналом.
Основные характеристики следящей системы:
наличие замкнутого контура положению (перемещению) регулируемой величины;
наличие сигнала рассогласования, используемого для управления исполнительным двигателем, обеспечивающим непрерывную отработку входного воздействия;
низкие энергетические показатели, что не имеет существенного значения, поскольку они работают непродолжительное время.
16
Помимо общих требований к приводам следящих систем к исполнительным двигателям приводов промышленных роботов предъявляются и специфические требования, связанных с плавность траектории движения манипулятора и быстродействием перемещения звеньев манипулятора:
1.Электродвигатели, применяемые в следящем приводе, должны иметь плавную регулировку скорости в широких пределах.
2.Режим работы двигателя должен быть устойчивым во всем рабочем диапазоне угловых скоростей.
Это требование выполняется в случае, если положительному приращению момента соответствует отрицательное приращение частоты вращения ротора, т.е. если dM/dΩ<0.
3.Возможность реверсирования.
4.Мощность управления должна быть малой при значительной мощности на валу.
5.Следящая система должна обладать высоким быстродействием, т.е. малым временем отработки сигнала.
Время отработки сигнала или время регулирования определяется, главным образом, электромеханическими
переходными процессами, так |
как |
электромагнитные |
переходные процессы в быстротечны. |
|
|
Следящая система (СС), |
система автоматического ре- |
|
гулирования (управления), воспроизводящая на выходе с определённой точностью входное задающее воздействие, изменяющееся по заранее неизвестному закону.
Для осуществления процесса управления исполнительного двигателя СС с требуемой точностью применяют специальные корректирующие устройства, входящие в состав усилителя мощности и дополнительные местные обратные связи. Следящие приводы постоянного тока дают:
возможность просто, плавно и экономично регулировать скорость вращения в широком диапазоне;
устойчиво работают при любых скоростях вращения; не имеют самоход.
17

ФУНКЦИНАЛЬНАЯ СХЕМА ТРЕХКОНТУРНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ
Следящие электроприводы или системы управления положением представляют собой замкнутые электроприводы, управляющие перемещением и обеспечивающие стабилизацию положения объекта регулирования относительно некоторой базовой системы координат.
Во многих случаях следящие электроприводы строятся
по принципу подчиненного регулирования на основе двигателей постоянного тока.
Функциональная схема следящей автоматической системы представлена на рис. 2, где обозначено: РП – регулятор положения; РС – регулятор скорости; РТ – регулятор тока; Д – двигатель; ОР – объект регулирования; ДП, ДС, ДТ – датчики соответственно положения, скорости и тока.
Рис. 2. Функциональная схема обобщенной следящей автоматической системы
Следящая автоматическая система содержит три контура регулирования:
положения; скорости; тока.
18
Внутренние контуры регулирования (скорости и тока) определяют быстродействие следящей системы.
Внешний контур определяет точность управления следящей системы. Во внешнем контуре используется датчик обратной связи по перемещению (ДП). Это может быть датчик углового положения или датчик линейного перемещения. Сигнал с выхода ДП сравнивается с управляющим сигналом, определяющим положение объекта.
По результату сравнения регулятором перемещения вырабатывается сигнал задания скорости для системы регулирования скорости, который, в конечном счете, обеспечивает вращение двигателя и перемещение на заданный угол.
Вследящей системе различают два режима работы: позиционирования; слежения.
Врежиме позиционирования система должна обеспечить перемещение рабочего органа из одного исходного положения в другое за заданное время.
Такое требование предъявляется, например, для
приводов манипулятора промышленного робота.
При этом траектория перемещения чаще всего не имеет значения, хотя иногда могут выдвигаться требования к апериодическому переходному процессу выходного сигнала.
Врежиме позиционирования позиционная ошибка отсутствует, а значение скоростной ошибки ограничивается.
Врежиме слежения следящая система должна обеспечить перемещение, например одного из звеньев
манипулятора промышленного робота, в соответствии с управляющим, задающим координату входным сигналом, изменяющимся по произвольному закону, при ошибке, не превышающей заданного значения.
При рассмотрении следящей системы в режиме позиционирования по значениям промежуточных координат различают три случая:
19
малые перемещения, когда регуляторы всех трех контуров привода не выходят в насыщение;
средние перемещения, когда в насыщение выходит регулятор тока;
большие перемещения, когда в насыщение выходит и регулятор скорости.
Контуры скорости и тока строятся в следящей системе такие же, как в системах регулирования скорости.
Случай малых перемещений не является характерным для режима позиционирования.
В большинстве следящих систем наилучшим считается такой переходный процесс отработки средних перемещений, когда скорость двигателя в процессе отработки заданного угла изменяется по треугольному графику.
Для того чтобы в следящей системе при отработке заданного углового перемещения происходило управление двигателем, близкое к режиму включение/выключение, необходимо обеспечить заданное значение коэффициента передачи регулятора перемещения.
Иногда задание перемещения осуществляется по трапе-
циодальному закону.
Оценка качества следящей системе в режиме слежения осуществляется по следующим показателям:
точности слежения; запасу устойчивости; помехоустойчивости.
Количественная оценка точности слежения следящей системы может быть произведена в результате рассмотрения ее работы в условиях совместного влияния управляющего и возмущающего воздействий.
Помехоустойчивость, как и изменение нагрузки двина валу двигателя постоянного тока относится к возму-
щающим внешним воздействиям.
20