

Учебное пособие 800251
.pdfПри получении уравнений пространства состояний по передаточной функции двигателя постоянного тока вос-
пользуемся следующими преобразованиями:
Wпд(s) = Кд/(Тм*Тя*s² + Тм*s + 1) = (1/Тм*s)*[1/(Тя*s +1)] / /[1 + (1/Тм*s)*[1/(Тя*s + 1)]].
Структурная схема, реализующая полученную передаточную функцию двигателя с учетом преобразования апериодического типового звена 1-го порядка и переноса элемента структурной схемы через сумматор против направления передачи сигнала - на рис. 5.
u |
dx2/dt |
x2 dx1/dt |
x1 = y |
Kд |
|
1 |
1 |
Tя*Tм |
|
S |
S |
|
|
1 |
|
|
|
Tя |
|
|
|
1 |
|
Tя*Tм
Рис. 5. Структурная схема по передаточной функции двигателя
Уравнения, связывающие значения dx/dt и значения x, запишутся в виде
dx2/dt = – 1/Tэ *х2 – 1/Тэ*Тм*х1 + Кпд/Тэ*Тм*u dx1/dt = х2
у = х1.
Матрицы уравнения состояний типового динамического звена 2-го порядка определяются выражениями
31

|
х1 |
х2 |
|
u |
dx1/dt |
0 |
1 |
dx1/dt |
0 |
А = |
|
|
В = |
|
dx2/dt |
–1/ТяТм –1/Тя , |
dx2/dt |
Кд/(ТяТм) , |
|
х1 |
х2 |
|
|
|
С = у 1 |
0 , |
D = 0. |
|
|
СТРУКТУРНАЯ СХЕМА И ПЕРЕДАТОЧНАЯ ФУНКЦИЯ СЛЕДЯЩЕЙ СИСТЕМЫ
Электромеханическая следящая система состоит из САР скорости и СС. Составим передаточную функцию СС для замкнутой системы:
220KdKyKrsKpKpu
Wзам(s) TaTmTys4 (TaTm TmTy)s3 (Tm Ty)s2 (KdsKdKyKrs 1)s 220KdKyKrsKpKpu
Составим передаточную функцию СС для разомкнутой системы:
220Kd KyKrsKpKpu
Wраз (s) TaTmTys4 (TaTm TmTy )s3 (Tm Ty )s2 (KdsKd KyKrs 1)s
Так как электромеханическая следящая система аста-
тическая первого порядка, позиционная ошибка отсутствует.
уст1 |
0 |
|
|
|
|
уст 2 |
|
|
С |
1 |
|
|
К раз |
|
|||
К раз |
220 |
K py K p K 0 |
|||
K K rs K y K d
0 1 К rs K y K d K ds
32

1 |
Kpu1 |
220 |
Kpu2 |
Ky |
Kd |
Kred |
1 |
|
Ty.s+1 |
Tm*Ta.s2+Tm.s+1 |
s |
||||||
In1 |
|
Gain3 |
|
Out1 |
||||
Gain |
Gain1 |
Transfer Fcn |
|
Transfer Fcn2 |
||||
|
Transfer Fcn1 |
|
||||||
33 |
|
|
|
|
Ktg |
|
|
|
|
|
|
Kdos |
Gain2 |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
Gain4 |
|
|
|
|
|
Рис. 6. Структурная схема электромеханической следящей системы
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ
Для исследования электромеханической системы составляется ее математическое описание. Математическое описание системы представляется уравнениями математического описания элементов функциональной схемы.
При составлении дифференциальных уравнений следует принять, что все элементы электромеханической системы описываются линейными уравнениями с постоянными коэффициентами, момент сопротивления на валу двигателя постоянного тока равен нулю и коэффициент полезного дей-
ствия редуктора равен 1.
Дифференциальные уравнения, описывающие процессы в двигателе постоянного тока с возбуждением от постоянных магнитов, анализируются в л.р. 2 .
При составлении структурной схемы электромеханической следящей системы используются уравнения звеньев системы в операционной форме и полученные для этих звеньев передаточные функции.
Двигатель постоянного тока представляется структур-
ной схемой, составленной по уравнениям.
Для двигателя и усилителя мощности составляется уравнение состояний, как для типовых динамических звеньев.
На различных этапах выполнения курсовой работы исследуются как структурная схема электромеханической следящей системы, так и структурная система САР скоро-
сти.
На последнем этапе используемая структурная схема электромеханической следящей системы преобразуется в
схему с доступом к переменным состояний.
Определяются передаточные функции электромеханической следящей системы в разомкнутом и замкнутом состояниях
34
По полученным при моделировании логарифмической амплитудной частотной характеристике (ЛАЧХ) и логарифмической фазовой частотной характеристике (ЛФЧХ) разомкнутой системы делается вывод об устойчивости системы при заданных параметрах.
Вывод об устойчивости системы делается также и с помощью полученной амплитудно-фазовой частотной характеристики разомкнутой системы и по корням характеристического уравнения замкнутой системы.
В процессе анализа СС используют зависимости времени регулирования tр и перерегулирования σ переходной характеристики замкнутой системы от коэффициента Краз, изменяя коэффициент Кпу1.
Необходимо учитывать зависимость установившегося значения hуст САР скорости от коэффициента Кпу2. Приводится вывод о невозможности одновременного обеспечения заданного значения перерегулирования и установившегося значения переходной характеристики.
Принципы определения времени регулирования и пе-
регулирования по переходной характеристике системы рассмотрены в л.р. 5.
Устойчивость по расположению корней характеристического уравнения
При задании в рабочей области Matlab передаточной функции СС в виде tf-формы или заданной структурной схемы системы в области Simulink, определяются корни характеристического уравнения замкнутой системы и расположение корней на комплексной плоскости
>>pole(h)
>>pzmap(h),
где h – задание в tfформе передаточной функции замкнутой системы.
35
По расположению корней и их значению определяются
значение величин η, φ, и делается вывод о устойчивости.
Устойчивость по логарифмическим частотным характеристикам разомкнутой системы
Для передаточной функции разомкнутой системы определяются логарифмические амплитудная и фазовая частотные характеристики (ЛАЧХ и ЛФЧХ)
>>bode(h1),
где h1 – задание передаточной функции разомкнутой СС. По представленным графикам ЛАЧХ и ЛФЧХ разомк-
нутой системы определяются запасы устойчивости по фазе Δφ и по амплитуде ΔL.
Устойчивость по амплитудно-фазовой частотной характеристике
Для передаточной функции разомкнутой системы определяется амплитудно-фазовая частотная характеристика
>>nyquist(h1),
где h1 – задание передаточной функции разомкнутой системы. На представленной АФЧХ с обозначенной точкой (-1,j0)
указывается запас устойчивости по фазе Δφ.
Устойчивость по переходной характеристике
Для передаточной функции замкнутой системы определяется переходная характеристика
>>step(h),
где h – задание передаточной функции замкнутой системы. Если переходная характеристика h(t) системы с зату-
хающими колебаниями, то система устойчива.
36

ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА ДВИГАТЕЛЯ
1. Схема моделирования двигателя в библиотеке SimPowerSystems представлена на рис.7. Параметры двигателя для сопротивления Rя введены в верхнюю схему, а параметры двигателя для измененного сопротивления *Rя – в нижнюю схему.
Continuous |
|
powergui |
Gain |
0.1877 
|
TL |
m |
|
|
dc |
g |
|
|
2 |
A+ |
A- |
1 |
|
|
DC Voltage SourceIdeal Switch |
DC Machine |
|
|
|
Gain1 |
|
|
0.2784 |
|
TL |
m |
|
|
dc |
g |
|
|
2 |
A+ |
A- |
1 |
|
|
Ideal Switch1 |
DC Machine1 |
|
Step
Scope
Рис. 7. Схеме моделирования двигателя без обмотки возбуждения
2.Двигатель DC Machines выбран из каталога Mahines.
Выключатель Ideal Switch - из Power Electronics.
DC Voltage – из Electrical Sources. Остальные элемен-
ты из каталога Simulink.
Задаются параметры двигателя DC: сопротивление Rя; индуктивность Lя;
момент инерции Jн; константа Се; константа См = N.
3.Представляются переходные характеристики по скорости и по току.
37

РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИГАТЕЛЯ
1. Используя уравнения Кирхгофа для электрических цепей и уравнения моментов для электромеханических цепей для двигателя постоянного тока с возбуждением от постоянных магнитов запишем систему уравнений
|
|
|
|
di |
|
U |
н (t) iя (t) Rя L |
|
E (t) |
||
dt |
|||||
|
|
|
|
|
|
M д (t) M н (t) M c (t) |
|
||||
|
|
d (t) |
|
|
|
M |
н (t) J |
|
|
|
|
dt |
|
|
|||
|
|
|
|
||
E (t) C e (t) |
|
|
|||
|
M н (t) С м iя (t ) |
|
|||
|
|
||||
где См, Се– электромеханическая и электрическая постоянные Перепишем систему уравнений в виде
diя/dt = [Uн(t) - Rя*iя(t) – Се*ωдв (t)] / Lя ωдв (t)/dt =Cm* iя(t) / Jн .
Введем новое обозначение переменных
X(1)= iя(t),
X(2)= ωдв (t).
Запишем систему уравнений в форме Коши |
|
d X(1)/dt = [Uн(t) - Rя* X(1) – Се* X(2)] / Lя |
(1) |
d X(2)//dt = Cm* X(1) / Jн . |
|
38
2. В рабочей области Matlab для решения системы уравнений двигателя постоянного тока задаем оператор
>> dee.
Появляется окно вида
Differential Equation
Editor
DEE
deedemo1 |
|
deedemo2 |
|
deedemo3 |
|
deedemo4 |
|
|
|
|
|
|
|
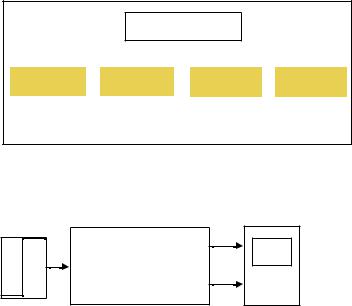
3. В области Simulink представляется схема моделирования для решения дифференциального уравнения двигателя с блоком DEE – рис. 8.
Differential Equation
Editor
Step
DEE |
Scope |
Рис. 8. Схема моделирования для решения дифференциального уравнения двигателя.
Последовательность задания параметров блока DEE: вход – 1;
выходы – Х(1), Х(2):
начальные условия – 0, 0; дифференциальные уравнения согласно выражению ( 1 ).
39
ДАТЧИКИ ОБРАТНОЙ СВЯЗИ ПО СКОРОСТИ И ПОЛОЖЕНИЮ
Контур скорости определяет быстродействие электромеханической следящей системы. Он настраивается на задан-
ное перерегулирование.
Контур перемещения определяет точность электромеханической следящей системы.
Электромеханическая следящая система является астатической системой первого порядка, позиционная ошибка отсутствует.
Скоростная ошибка электромеханической следящей системы при ступенчатом единичном воздействии определяется εуст2=1/Краз, где Краз – коэффициент передачи разомкнутой системы.
Вкачестве датчика скорости используются тахогенератор постоянного тока.
Вкачестве датчика обратной связи по положению
рекомендуется датчик угла поворота. Это потенциометрический датчик burster 8820 EN, который имеет следующие характеристики:
Максимальная скорость – 600 об/мин.; Измерительный диапазон – 350º ± 4º; Максимальный выходной сигнал – 50 В.
.
ИССЛЕДОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ
Из условий работы САР скорости следует, что при подаче на вход системы Uн = 220В двигатель разгоняется до
номинальной скорости - nном. Изменяется Кпу2.
По условиям работы переходная характеристика СС
быть апериодической 2-го порядка. Изменяется Кпу1.
На рис. 9 представлены переходные характеристики следящей системы при изменении Кпу1.
40