

4.2.5.7. Позиционирование объектов
Откройте
окно OBJECT POSITIONING, щелкнув по кнопке
![]() станут доступны следующие различные
методы позиционирования Deform-3D:
станут доступны следующие различные
методы позиционирования Deform-3D:
Таблица №6 Методы позиционирования
Кнопки |
Описание |
|
Объекты могут быть установлены с помощью мыши перетаскиванием их по ОКНУ ЭКРАНА ДИСПЛЕЯ |
Окончание таблицы №6
Кнопки |
Описание |
|
Объекты могут быть размещены в определенном направлении, они будут перемещаться и вращаться, до тех пор, пока не остановятся в состоянии равновесия относительно других объектов. Гравитационное позиционирование используют в том случае, когда для исходной позиции объекта неоднозначно указаны тип урегулирования положения на имеющий форму впадины поверхности |
|
Объекты могут быть перемещены на определенное расстояние любым заданным вектором или с помощью определения точек начала и конца перемещения |
|
При интерференционном позиционировании, размещаемый объект будет перемещаться так, чтобы он немного пересекал другой объект |
|
Объекты могут вращаться по заданному углу относительно любой оси |
|
Регулируемое позиционирование подобно гравитационному и используется в случае, если начальное положение объекта несколько неточно определено. Гравитационное позиционирование, однако, является новым методом позиционирования, который имеет тенденцию к получению лучших результатов в большинство случаев |
4.2.5.8. Позиционирование мышью
Щелкните
по кнопке![]() ,
и выберите объект позиционирования
Block. В окне ЭКРАНА ДИСПЛЕЯ, щелкните на
стрелке +Z, и потащите Block вверх так, чтобы
он больше не находился на объекте Buttom
Die.
,
и выберите объект позиционирования
Block. В окне ЭКРАНА ДИСПЛЕЯ, щелкните на
стрелке +Z, и потащите Block вверх так, чтобы
он больше не находился на объекте Buttom
Die.
Рядом со стрелкой +Z расположена звездочка, показывающая, что в настоящее время направление перемещения отобрано.
Переключитесь на объект позиционирования Top Die, и используйте стрелку +Z, чтобы переместить его вверх до тех пор, чтобы он больше не находился в контакте с Block, и затем использовать стрелку -Y, чтобы разместить его в положении, показанном ниже.
4.2.5.9. Гравитационное позиционирование
В
качестве примера возможностей
гравитационного позиционирования,
давайте опустим объект Block на Buttom Die. Для
этого щелкните кнопкой
![]() и переключите объект позиционирования
на Block. Измените направление на -Z и
щелкните
и переключите объект позиционирования
на Block. Измените направление на -Z и
щелкните
![]() ,
чтобы выполнить позиционирование.
,
чтобы выполнить позиционирование.
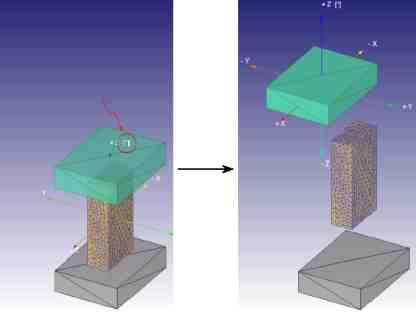
Рис. 53. Выбор точки и направления позиционирования инструментов.
4.2.5.10. Позиционирование смещением
В качестве примера использование позиционирования смещением, давайте передвинем Top Die так, чтобы он непосредственно находился на вершине объекта Buttom Die.
Щелкните
кнопкой
![]() ,
и переключите объект позиционирования
на Top Die. Существует два метода
позиционирования смещением: 1) задание
вектора перемещения или 2) определение
точек начала и окончания перемещения.
Чтобы определить необходимое расстояние
любой из этих вариантов позволяет
использовать мышь. Самым легким путем
является указание точек вершин объектов
Top Die и Buttom Die, которые будут использоваться
при позиционировании. Существует две
опции выбора точек.
,
и переключите объект позиционирования
на Top Die. Существует два метода
позиционирования смещением: 1) задание
вектора перемещения или 2) определение
точек начала и окончания перемещения.
Чтобы определить необходимое расстояние
любой из этих вариантов позволяет
использовать мышь. Самым легким путем
является указание точек вершин объектов
Top Die и Buttom Die, которые будут использоваться
при позиционировании. Существует две
опции выбора точек.
Выберите
эту опцию и укажите точки, показанные
ниже как точки начала и конца перемещения.
Щелкните по кнопке
![]() ,
чтобы выполнить перемещение.
,
чтобы выполнить перемещение.
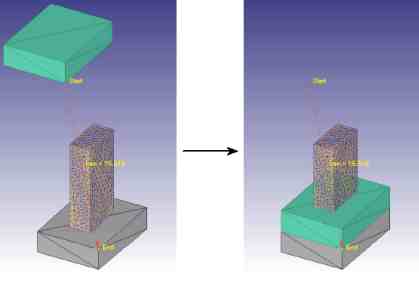
Рис. 54. Результат совмещения точек инструментов