

Геометрия
Верхний инструмент должен быть видим в ОКНЕ ЭКРАНА ДИСПЛЕЯ. Существует хороший инструмент, позволяющий проверить геометрию объекта после импортирования в Deform, чтобы пользователь мог удостовериться, что с ней не будет никаких проблем.
Для
проверки геометрии щелкните по кнопке
![]() .
По результатам проверку появиться окно
GEOMETRY CHECKING, в котором они будут отражены.
.
По результатам проверку появиться окно
GEOMETRY CHECKING, в котором они будут отражены.
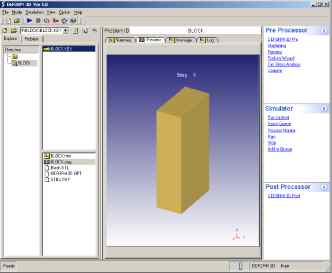
Рис. 47. Главное окно с предпросмотром выбранной задачи
Для объекта, который имеет замкнутый объем, там должны появится следующие значения: 1 поверхность, 0 свободных граней, и 0 недопустимых объектов (поскольку можно продвигаться по кругу). Объекты, которые импортированы, с поверхностями или телами, не имеющими свободных краев, должны все иметь только 1 поверхность.
В дополнение к вопросу, имеет ли импортированная геометрия проблемы, должна также быть проверена ориентация геометрии. Если геометрия представляет собой замкнутый объем, то правильная ориентация будет определена тогда, когда поверхностные нормали указывают из объекта. В случае, если геометрия – не является замкнутым объемом, то, правильная ориентация определена, в случае, если нормали обращены к заготовке.
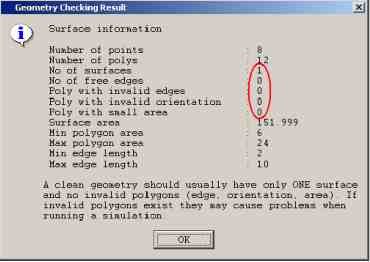
Рис. 48. Окно результатов проверки геометрии
Щелкните
по кнопке
![]() ,
чтобы рассмотреть поверхностные нормали,
и если поверхностные нормали правильно
высвятяться из объекта, то нажмите
кнопку
,
чтобы рассмотреть поверхностные нормали,
и если поверхностные нормали правильно
высвятяться из объекта, то нажмите
кнопку
![]() .
.
4.2.5.2. Нижний инструмент
Подсветите
Объект 3 в Дереве Объектов. Щелкните по
кнопке
![]() и измените Имя Объекта на Buttom Die (Нижний
инструмент). Импортируйте геометрию,
нажимая
и измените Имя Объекта на Buttom Die (Нижний
инструмент). Импортируйте геометрию,
нажимая
![]() и затем
и затем
![]() Геометрия находится в файле
Block_BottomDie.STL. Используйте кнопки проверки
геометрии
Геометрия находится в файле
Block_BottomDie.STL. Используйте кнопки проверки
геометрии
![]() и
и
![]() ,
чтобы удостовериться, что она не имеет
никаких проблем, и что нормали правильно
указывают из объекта. На этом этапе все
три объекта должны отобразиться на
дисплее.
,
чтобы удостовериться, что она не имеет
никаких проблем, и что нормали правильно
указывают из объекта. На этом этапе все
три объекта должны отобразиться на
дисплее.
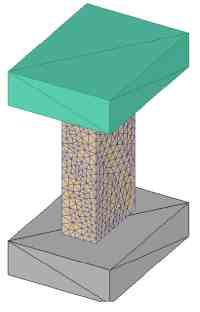
Рис. 49. Результат вставки геометрии объектов
4.2.5.3. Установка движения инструментов
Если какой-либо из инструментов перемещается, то его движение должно быть определено. В этой задаче, чтобы сжать Блок, будет Верхний инструмент перемещаться вниз.
Щелкните
на Верхнем инструменте в Дереве Объектов.
Так как это объект, который будет
двигаться, то он должен быть определен
как Первый Инструмент. Это можно увидеть,
на иконке
![]() рядом с первым инструментом.
рядом с первым инструментом.
Чтобы
определять движение, щелкните по кнопке
![]() .
Инструмент будет перемещаться вниз с
постоянной скоростью 1 дюйм/секунду.
Тип движения должен соответствовать
скорости
.
Инструмент будет перемещаться вниз с
постоянной скоростью 1 дюйм/секунду.
Тип движения должен соответствовать
скорости
Установите поле Speed (Скорость) на значение Constant (Постоянная)1 в/вторичный. Правильным направлением для этой задачи будет направление по умолчанию – ось Z
Что такое ход?
Данные по ходу при движении объектов представляют собой ту меру, характеризующую как далеко объект двигался с начала моделирования.
В большинстве случаев (кроме случая использования модели механического пресса) значение хода необходимо оставлять на нуле в начале моделирования, а затем оно изменится автоматически по ходу выполнения моделирования.
В качестве желаемого перемещения могут быть заданы любые функции.