

Учебное пособие 1851
.pdfматрица порядка (3 |
3). |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
~ |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
ˆ |
|
|
|
|
|
Пусть D( r , r )= -D( r |
)D( r ). Очевидно |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
~ ~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D( rˆ |
, rˆ )= |
|
|
||
~2 |
) |
2 |
|
~3 |
) |
2 |
] |
|
|
~1 |
~ 2 |
|
|
|
|||
[( r |
|
|
( r |
|
|
|
r |
r |
|
|
|
||||||
|
|
~2 |
~1 |
|
|
|
|
~3 |
) |
2 |
~1 |
) |
2 |
] |
|||
|
|
r |
r |
|
|
[( r |
|
( r |
|
||||||||
|
|
~r 3 ~r 1 |
|
|
|
|
|
~r 3 ~r 2 |
|
|
|
||||||
~r 1 ~r 3
~2 ~ 3 r r
~1 |
|
2 |
~ 2 |
|
2 |
] . |
[( r |
) |
|
( r |
) |
|
Пусть
|
|
|
|
|
|
|
|
|
|
~11 |
|
|
~12 |
~13 |
|
|
|
||
|
|
|
~ |
|
~ |
|
|
|
r |
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
)= |
|
|
~21 |
~22 |
~23 |
|
|
|
|||||||
|
|
D( rˆ |
|
, rˆ |
|
|
r |
|
r |
|
r |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
~31 |
|
~32 |
~33 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
r |
|
|
r |
|
r |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
~ ~ |
)dV |
|
|
|
|
|
|
(2.6) |
|
||
|
|
J |
= |
|
|
|
(D( rˆ , rˆ |
|
|
|
|
|
|
|
|||||
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ij |
|
|
|
~ij |
dV , |
(i, j = 1,2,3). |
|
|
|
|
|||||||
|
|
J |
|
|
|
r |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Величина |
~ii |
(i=1,2,3) называются |
осевым |
моментом |
||||||||||||||
|
J |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
~i |
системы |
~ |
связанной с |
|||||
инерции звена относительно оси Z |
|
Z , |
|||||||||||||||||
звеном. Величина |
~ij |
(i |
|
|
j, i, |
j = 1,2,3) называется центро- |
|||||||||||||
J |
|
|
|
|
|||||||||||||||
бежным моментом инерции звена относительно |
|
~i |
и |
||||||||||||||||
|
осей Z |
||||||||||||||||||
~ j |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
системы Z . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
|
|
|
|
|
|
|
|
|
||
|
Поскольку матрица D( rˆ |
|
, rˆ ) |
симметрична |
|
|
|
|
|||||||||||
|
|
~ij |
|
|
|
~ij |
dV = |
~ ji |
|
~ ji |
. |
|
|
|
|||||
|
|
J |
|
|
|
|
r |
r |
|
|
dV = J |
|
|
|
|||||
|
|
|
|
|
v |
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
Отсюда вытекает свойство симметрии относительно главной
~
диагонали матрицы J . Таким образом, инерционные свойства
86

звена во вращательном движении относительно неподвижной
~
точки определяются шестью элементами матрицы J .
Момент инерции звена относительно некоторой точки называется полярным моментом инерции звена относительно этой точки.
Полярный момент инерции звена относительно точки S
~ |
2 |
dV= |
|
~1 |
2 |
~2 |
2 |
|
~3 |
2 |
|
~ 2 |
2 |
|||||
Js = |
γ r |
γ [( r |
|
) +( r |
|
) +( r |
) ]dV=0,5 γ {[( r |
) + |
||||||||||
|
v |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
~3 |
2 |
|
~3 |
2 |
~1 |
|
2 |
|
|
~1 2 |
~2 |
2 |
|
|||
|
+( r |
) ]+[( r |
) +( r |
|
) ]+[( r |
) +( r |
) ]}dV= |
|
||||||||||
|
|
|
|
|
|
|
~ |
11 |
|
|
~22 |
|
~33 |
), |
|
|
||
|
|
|
|
|
=05( J |
|
+ J |
|
+ J |
|
|
|||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~11 |
|
~22 |
|
~33 |
|
~ |
|
|
|
||||||
|
|
|
J |
|
+ J |
+ J |
|
|
=2 Js . |
|
|
(2.7) |
||||||
Поскольку модуль вектора |
|
|
не зависит от выбора систе- |
|||||||||||||||
r |
||||||||||||||||||
|
|
|
~ |
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
мы координат |
Z , |
величина |
|
Js |
также не зависит от выбора |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
системы координат. Поэтому в любой системе координат Z с |
||||||||||||||||||
|
|
|
|
~ |
= const, и соотношение (7) удобно ис- |
|||||||||||||
началом в точке S |
Js |
|||||||||||||||||
пользовать для определения неизвестных моментов инерции звена по известным моментам инерции этого звена.
|
~ |
имеют тен- |
Можно показать, что компоненты матрицы J |
||
зорную природу и поэтому матрица |
~ |
|
J называется тензором |
||
инерции звена, определенным в системе координат |
~ |
|
Z , связан- |
||
ной со звеном. |
|
|
~ |
зависят от ориентации |
|
Компоненты тензора инерции J |
||
~ |
|
|
звена относительно системы Z . Можно показать, что сущест- |
||
вует система координат (не обязательно центральная), в которой центробежные моменты инерции звена равны нулю.
87
Такая система координат называется главной. В главной системе координат Z* инерционные свойства звена определяются тензором
J*11
J*= 0 0
0 0
J*22 0
0 |
J 33 |
|
|
* |
. |
|
|
Если главная система координат Z* является и центральной, то она называется
главной центральной системой координат звена и обо-
значается через Z.
В общем случае положение системы Z относительно звена не известно, и его определение является трудоем-
кой задачей. Решение этой задачи облегчается, если звено имеет оси симметрии, т.к. любая из этих осей будет главной центральной осью системы Z, а остальные главные центральные оси инерции звена будут ортогональны оси симметрии и друг другу и пересекутся на оси симметрии. Обычно оси симметрии определяются из конструктивных соображений.
Моменты инерции реальных звеньев вычисляются, обычно, путем разбиения этих звеньев на тела простейших форм, для моментов инерции которых имеются готовые формулы. После определения моментов инерции этих тел относительно их собственных центральных осей, момент инерции всего звена определяется как сумма моментов инерции его частей. При этом удобно использовать теорему Штейнера.
~
Пусть известен тензор инерции звена J , определенный в
~
центральной системе координат Z и требуется определить
88
тензор инерции |
* |
* |
J |
в системе Z , оси, которой параллельны |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
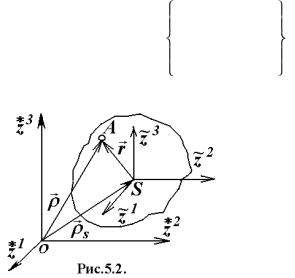
осям Z |
и одинаково с ними направлены, а начало отсчета Z |
||||||||||||||||||||||||
определено вектором |
|
|
|
|
|
(рис. 5.2). |
|
|
|
|
|
|
|
||||||||||||
|
s |
|
|
|
|
|
|
|
|
|
|||||||||||||||
По определению |
* |
|
|
|
* |
|
|
* |
|
|
|
|
|
|
|
|
|
||||||||
ˆ = |
ˆ |
s |
+ rˆ и |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
(D( |
* |
|
* |
)dV. |
|
|
|
|
|||
|
|
|
|
|
J = |
|
|
|
|
|
|
ˆ |
, ˆ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
* ij |
= |
( |
* |
|
|
|
|
* |
|
|
|
* |
j |
* |
|
|
|
|
|||
|
|
|
|
J |
ˆ si |
+ r i |
)( ˆ |
s |
+ r j )dV. |
|
|
|
|||||||||||||
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
~ |
параллельны и направлены одина- |
||||||||||||||||
Поскольку оси Z и |
Z |
||||||||||||||||||||||||
* k |
~ k |
(k=1,2,3) и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ково, r |
|
|
= r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
* ij |
= |
( * i |
|
~ i |
)( |
* |
j |
|
|
~ j |
)dV= |
* i * |
j |
dV+ |
|||||||||||
J |
|
+ r |
|
|
s |
|
+ r |
|
s |
||||||||||||||||
|
|
|
v |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
s |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
+ |
|
* |
~ j |
dV+ |
|
|
|
|
~ i |
* |
j |
dV+ |
~ i ~ j |
dV. |
||||||||||
|
|
ˆ i |
r |
|
|
|
|
r |
|
|
s |
r |
r |
||||||||||||
|
|
|
v |
s |
|
|
|
|
|
|
v |
|
|
|
|
|
|
v |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Для всех точек звена |
|
|
|
|
|
|
|||||||||||||||||||
rs |
одинаков и поэтому |
|
|
|
|||||||||||||||||||||
|
|
|
|
* ij |
= |
* i |
* |
|
|
j |
|
|
|
|
|
* |
i |
~ j |
dV |
|
|
||||
|
|
|
|
J |
|
s |
|
|
|
dV+ ˆ |
r |
|
|
||||||||||||
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
v |
|
|
|
|
+ * |
j |
|
~ i |
dV+ |
~ i ~ |
|
s |
|
r |
r |
r |
||
|
v |
|
|
v |
|
|
|
|
|
|
|
||
|
|
|
|
89 |
|
|
j dV,
|
* |
ij |
= |
* i |
* |
|
j |
dV+ |
* i |
|
|
|
~ j |
dV+ |
|
|
|||||||||
|
J |
|
|
|
s |
|
|
|
r |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ * |
j |
|
~ i |
|
|
|
~ij |
. |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
s |
|
|
r |
|
|
dV+ J |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
m= |
|
|
dV, |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
и оси |
системы |
|
~ |
|
|
|
|
|
|
|
получается |
|
~ k |
dV=0 |
|||||||||||
|
Z центральные, |
|
r |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
(k=1,2,3), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* ij |
=m |
* i |
+ * |
j |
|
~ij |
|
|
|
|
|
|
|
|
(2.8) |
||||||
|
|
|
J |
|
|
s |
|
J |
|
. |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Аналогично |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
* |
|
[( * s2 |
|
~2 |
|
2 |
|
|
|
~3 |
|
2 |
|
|
|
|
{( * s2 |
2 |
|
||||||
J 11 = |
|
+ r |
|
) +( * s3 |
+ r |
|
) ]dV= |
|
) + |
||||||||||||||||
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
+2 |
2 |
~2 |
|
|
~ 2 |
2 |
|
2 |
|
* |
3 |
~ 3 |
|
~ 3 |
2 |
|
|
||||||||
* s |
r |
|
|
+( r |
) +( |
* s3 ) +2 |
|
|
s |
r |
|
+( r |
) }dV= |
||||||||||||
=( * 2 |
|
2 |
|
|
dV+2 * |
2 |
|
|
~ 2 |
dV+ |
|
|
|
~ |
2 2 |
|
|
||||||||
) |
|
|
s |
|
|
r |
|
|
|
[( r |
) + |
|
|||||||||||||
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
v |
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
~3 |
2 |
* 3 |
~ 3 |
|
+( r |
) }dV+2 |
r dV+( |
||
s |
||||
|
|
|
v |
С учетом изложенного выше
* s3 )2 |
dV. |
|
v |
J* 11 = а12 m+ J~11 ,
где
90

|
* 2 |
2 |
* 3 |
2 |
1/2 |
|
|
а1=[( |
) +( |
) ] |
|
– |
|||
|
s |
s |
|
||||
расстояние между осями |
* |
1 |
~ 1 |
. |
|
|
|
Z |
|
и Z |
|
|
|
||
Аналогично получаются выражения и для Таким образом,
* ii |
2 |
~ ii |
|
J |
= а i |
m+ J |
. |
* 22 |
и |
* 33 |
. |
J |
J |
(2.9)
Соотношение (9) выражает теорему Штейнера: момент инерции звена относительно какой либо оси равен моменту инерции этого же звена относительно оси проходящей через центр масс звена параллельно данной оси, плюс произведение массы звена на квадрат расстояния между этими осями.
Из теоремы Штейнера следует, что осевые моменты инерции звена относительно центральных осей достигают минимальных значений, так как при этом ai =0.
91
6.основы теории точности позиционирования схвата
6.1.Виды и природа погрешностей положения и движе-
ния звеньев
Положения и движения всех звеньев ММ отличаются от теоретически рассчитанных положений и движений этих звеньев. Существует несколько причин этого явления.
Технологические причины обусловлены разбросом параметров рабочих и измерительных инструментов, технологического оборудования и приспособлений, на которых обрабатывают звенья, а также другими причинами.
Динамические причины обусловлены действием на звенья механизма сил и моментов сил различной природы, вызывающих упругие деформации, а также износ элементов звеньев при их движении.
Эксплуатационные причины погрешностей позициониро-
вания и движения звеньев вызваны изменением температуры частей звеньев за счет потерь мощности при преобразованиях энергии и трения, а также изменениями температуры окружающей среды.
Допустимые отклонения геометрических параметров позиционирования выходного звена механизма не могут быть произвольными и регламентируются системой допусков, назначаемых исходя из оптимальных технико-экономических показателей.
Допуском некоторой величины называется разность между верхним и нижним предельными ее значениями. Допуски должны соответствовать техническим условиям и требованиям, предъявляемым к производимой продукции, а также обеспечивать хорошие технико-экономические показатели изготовления и эксплуатации механизма.
Очевидно, что повышение требований к точности механизма, повышает затраты на его проектирование, изготовление и эксплуатацию, требует использовать более качественные и
92
износостойкие, а значит и дорогостоящие, материалы. Поэтому допуски на изготовление звеньев механизма и параметры его движения должны быть рациональными, для чего следует использовать методы теории точности механизмов.
Согласно этой теории размеры деталей изготовленных на одном и том же оборудовании и одним и тем же персоналом имеют случайные отклонения в пределах допусков. Случайным событием является и сборка звеньев из деталей, а также сборка механизма из звеньев. За счет этих событий геометрические параметры механизма оказываются случайными величинами, законы распределения которых могут быть определены только экспериментально. Случайный характер изменения эксплуатационных нагрузок не вызывает сомнения, но законы их распределения априорно не известны. Кроме этого случайными оказываются характеристики электрических, магнитных, гидравлических и пневматических устройств, датчиков и цепей.
Из изложенного следует, что теория точности механизмов манипуляторов должна быть вероятностной и статистической.
Ниже рассматриваются основы теории геометрической точности механизмов, позволяющей оценить точность позиционирования схвата. Эта теория рассматривает две задачи: анализ точности функционирования заданных механизмов по известным характеристикам точности параметров звеньев и их положений, и синтез (проектирование) механизмов, удовлетворяющих заданным требованиям к их функционированию. При решении обеих задач должны учитываться ошибки изготовления звеньев, и расположения элементов пар, называемые первичными ошибками. Следует помнить, что не все первичные ошибки влияют на точность механизма. Число первичных ошибок можно значительно уменьшить при соответствующем выборе поверхностей базирования при проектировании, разработке технологии изготовления и изготовлении деталей ММ.
93
Теория точности использует следующую терминологию.
Ошибкой механизма по некоторому его параметру назы-
вают отклонение действительного значения этого параметра от расчетного (идеального) значения. Ошибка параметра характеризует точность механизма.
Ошибки называ-
ют кинематическим или динамическими в зависимости от того,
какие причины их порождают, или какие уравнения используются для их определения. Кинематические ошибки механизма определяются, в основном, первичными ошибками.
Теоретическим называют механизм, все звенья которого и их элементы выполнены абсолютно точно и зазоры в кинематических парах отсутствуют.
Идеальным называется теоретический механизм, точно воспроизводящий заданные движения.
Реальным называют механизм, имеющий ошибки и поэтому функционирующий с ошибками.
Действительным называют конкретный существующий механизм, ошибки которого могут быть измерены.
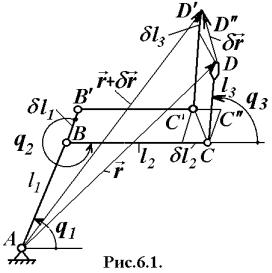
Ошибкой положения механизма называют отклонение положений выходных звеньев действительного механизма и соответствующего действительному механизму идеального механизма при одинаковых их обобщенных координатах (рис.
6.1)
94
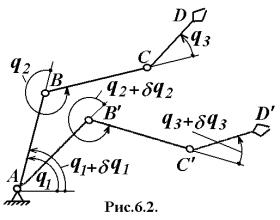
Ошибка положения выходного звена определяется также, как и ошибка положения, но с учетом ошибок в положениях входных звеньев (рис.
6.2.).
Ошибка перемещения механизма равна разности пе-
ремещений выходных звеньев действительного и идеального механизмов при одинаковых изменениях обобщенных координат этих механизмов. Можно показать, что ошибка перемещения механизма равна разности ошибок положений механизма в конце и начале перемещения.
Мертвый ход возникает при наличии зазоров в кинематических парах или упругой деформации звеньев механизма и проявляется в том, что при изменении направления движения входного звена на обратное, называемом реверсом, выходное звено остается некоторое время неподвижным. Мертвый ход проявляется и в том, что при неизменных положениях входных звеньев выходное звено может совершать некоторые перемещения.
Теория точности использует аналитические, графические и графо - аналитические методы.
6.2.Геометрические ошибки в кинематических парах
Взаимное расположение звеньев в кинематических парах изменяется под действием приводных механизмов. Ошибки взаимного расположения звеньев зависят от ошибок изготовления элементов звеньев.
При этом предполагается, что форма элементов звеньев остается точной. При таком предположении, ошибка элемента
95