

Учебное пособие 1851
.pdfвращения вектора r , а элементы матрицы преобразования проекци вектора вычислить для -q. Действительно формула (1) дает:
r* = r cos q+(1-cos q)( e  r ) e +[(e2r3–e3r2) q 1 + +(e3r1–e1r3) q 2 +(e1r2 –e2r1) q 3 ]sin q ,
r ) e +[(e2r3–e3r2) q 1 + +(e3r1–e1r3) q 2 +(e1r2 –e2r1) q 3 ]sin q ,
где еk (k=1,2,3) – проекции орта e на оси системы Z.
Пусть e = q 3 , т.е. ось поворота вектора r совпадает с осью z3 системы Z. Тогда
еk = e  q k = q 3 q k = k3 , e1=e2=0, e3=1, r*1 =( r*
q k = q 3 q k = k3 , e1=e2=0, e3=1, r*1 =( r*  q 1 )=r1cosq-r2sinq,
q 1 )=r1cosq-r2sinq,
r*2 =( r*  q 2 )=r1sinq+r2cosq,
q 2 )=r1sinq+r2cosq,
r*3 =( r*  q 3 )=r3cosq+(1-cosq)r3=r3 .
q 3 )=r3cosq+(1-cosq)r3=r3 .
Полученные результаты совпадают с результатами преоб-
разования rˆ =K rˆ , где |
rˆ = { rk } , |
rˆ = {rk} – проекции векто- |
|||||||||
|
|
|
|
|
* |
|
* |
* |
|
|
|
ров |
|
|
|
|
на оси системы Z; |
|
|
|
|
||
r* и r |
|
|
|
|
|||||||
|
|
|
|
|
|
cosq |
sin q |
0 |
|
|
|
|
|
|
|
|
K |
sin q |
cos q |
0 |
– матрица поворота. |
||
|
|
|
|
|
|
0 |
0 |
1 |
|
|
|
После поворота ортов q k вокруг оси вращения вектора |
|
|
|||||||||
r |
|||||||||||
они превращаются в орты |
|
|
|
|
|||||||
|
|
q k |
= q k cosq+(1-cosq)( e |
q k ) e +( e q k )sinq. |
|||||||
* |
|
|
|
|
|
|
|
||||
Проекции орта q*k на оси системы координат Z определяются выражением
66
=К qˆ k .
Если кинематическая пара поступательная, то при перемещении в ней звена в направлении орта e , вектор-радиус r*
некоторой точки перемещающегося звена преобразуется по закону
r* = r +q e ,
где q – линейное перемещение звена в направлении орта e .
Проекции вектора r* на оси некоторой системы Z вычисляются по формуле:
r* = rˆ +q eˆ .
4.3.Прямая задача о положении и ориентации схвата
Прямая задача о положении и ориентации схвата заключается в определении положения некоторой точки схвата и ориентации некоторых связанных с схватом векторов относительно базового звена по известным размерам звеньев и обобщенным координатам ММ.
При сборке механизма совершаются повороты звеньев, описываемые матрицами Пi (i=0,1 …., n), где i-номер звена. В собранном механизме звенья занимают друг относительно друга положения, соответствующие нулевым значениям обобщенных координат qi.
Пусть Zi (i=0,1,2, …, n) – система координат, связанная со звеном i, находящимся в составе механизма и Ki – матрица
преобразования Zi+1 Zi. |
Тогда проекции некоторого вектора |
||||||||
|
|
на оси систем Zi и Zi+1 |
, задаваемые матрицами rˆ |
|
={ r k |
|
} и |
||
r |
1 |
1 |
|||||||
|
|
|
|
i |
i |
|
|
||
rˆ |
={ r k } (k = 1,2,3) будут связаны преобразованием |
rˆ =Кi rˆ |
|
. |
|||||
|
i |
i |
|
|
i |
i 1 |
|
||
Пусть rˆТn ={ rTkn } – матрица координат некоторой точки Т схвата, определенных в системе Zn, связанной со схватом, и
ˆ |
j |
= rˆ |
1, |
j - rˆ |
j,i |
(j=0,1,…,n-1) – вектор-радиус, определяющий |
|
j |
|
|
|||
|
|
|
|
|
|
67 |
положение начала отсчета системы Zj+1 относительно начала отсчета системы Zj .
Если ˆj ={ jk } – матрица, определенная в системе Zj, то координаты точки Т в системе Zn-1 определяются матрицей:
rˆТ(n 1)= ˆ n 1 +К(n-1) rˆТn .
Координаты точки Т в системе n-2 определяются матри-
цей:
rˆТ(n 2 ) = ˆ |
n |
+К(n-2) rˆТ(n 1). |
|
||
|
|
2 |
|
||
Таким образом |
|
|
|
|
|
ˆ |
j = ˆ |
|
ˆ |
(3.1) |
|
rТ |
j |
+ Кj rТ(j 1) . |
|||
|
|
|
|
|
|
Соотношение (1) имеют рекуррентный характер и удобны при преобразовании координат. Применяя n+1 раз преобразования (1), получают координаты точки Т хвата в базовой системе Zо
rˆТ о = ˆо +Ко rˆТ 1 .
Пусть ориентация свата задана взаимно-ортогональными ортами, связанными с схватам. В качестве таких ортов можно выбрать произвольные орты, но более удобными будут орты
любых двух осей системы координат Zn , например |
q 1 |
и q 2 . |
||||||
|
|
|
|
|
|
|
n |
n |
Тогда ориентация схвата в системе координат Zо базового зве- |
||||||||
на определяется выражениями: |
|
|
|
|
|
|||
qˆ |
1 |
= Коn qˆ |
1 , qˆ |
2 =Коn qˆ2 , |
|
|
(3.2) |
|
|
nо |
|
n |
nо |
n |
|
|
|
где |
|
|
|
|
|
|
|
|
qˆ j ={ q jk |
}, (k = 1, 2, 3), qˆ j |
={ q jk |
}, |
|
|
|||
n |
n |
|
|
nо |
no |
|
|
|
|
Коn=Ко К1 …. Кn – |
|
|
|
(3.3) |
|||
матрица преобразования Zn |
Z0 . |
|
|
|
|
|
||
|
|
|
68 |
|
|
|
|
|

Кроме рассмотренного подхода к решению задачи об ориентации схвата применяется подход, использующий орт en и
некоторый, связанный с схватом, орт ec , ортогональный en ,
от которого удобно отсчитывать угол qn поворота схвата. Иногда такой подход удобнее первого.
Соответствующая система уравнений, аналогичная по структуре и назначению системе (2), принимает вид:
|
|
eˆno =Коn eˆn , |
eˆco =Коn eˆc , |
|
|
(3.4) |
|||
где |
|
|
|
|
|
|
|
|
|
eˆ |
={ ek }, |
eˆ |
={ ek }, |
eˆ |
={ ek |
}, |
eˆ |
={ ek |
}. |
n |
n |
c |
c |
no |
no |
|
co |
co |
|
Полученные соотношения верны только для ММ, имеющих вращательные кинематические пары. Если j -я кинематическая пара поступательная, то (2) принимает вид
|
|
|
rˆТ j = ˆ |
+ Кj rˆТ(j 1) + qi eˆ j , |
(3.5) |
||
|
|
|
|
j |
|
|
|
где eˆ |
j |
={ ek |
} – проекции орта e |
n |
оси кинематической пары j на оси Zj. |
||
|
j |
|
|
|
|
||
Соотношения, использующиеся для решения задачи об ориентации схвата, остаются в силе.
Из изложенного следует, что если обобщенные координаты известны, то задача об определении положения и ориентации схвата в базовой системе Zо решается вполне однозначно при любом числе звеньев ММ.
4.4.Обратная задача о положении и ориентации схвата
Обратная задача о положении и ориентации схвата заключается в определении обобщенных координат ММ, при которых обеспечивается заданное положение некоторой точки схвата и заданная ориентация двух взаимно ортогональных ортов, связанных со схватом.
Решение обратной задачи о положении схвата – это определение qi из системы:
69

rˆТ о = ˆо +К0( ˆ1 +К1( ˆ 2 +К2( ˆ 3 +К3( ˆ4 +К4( ˆ5 +
+К5( ˆ6 |
+ … К(n-2)( ˆ( |
ˆ |
(4.1) |
) +К(n-1) rТn ) …), |
|||
|
n 1 |
|
|
где rˆТn , rˆТ о - матрицы координат заданной точки схвата в системах Zn и
Zо.
Пусть en и ec - взаимно ортогональные орты, связанные с схватом, а eˆn , eˆc - матрицы их проекций на оси системы Zn . Эти проекции не являются независимыми, поскольку модули ec , en равны единице. Например:
e3 |
=[1-( e1 )2–( e2 )2]2. |
(4.2) |
|
с |
с |
с |
|
Кроме этого верны условия ортогональности en и ec
ek |
ek |
=0. |
(4.3) |
n |
с |
|
|
Наличие трех соотношений (2) – (3) позволяет задав, на-
пример en1 , en2 и eс1 , определить остальные компоненты eˆn
и eˆc . Это указывает на возможность задания ориентации схва-
та тремя величинами en1 , en2 и eс1 .
Решение обратной задачи об ориентации схвата заключается в определении qi из системы уравнений, содержащей первые два уравнения системы
Коn eˆn = eˆno |
(4.4) |
и первое уравнение системы |
|
Коn eˆc = eˆco |
(4.5) |
где |
|
Коn=Ко К1К2 … К(n-1)Кn ; |
(4.6) |
eˆno , eˆco - матрицы проекций en и ec на оси Zо. |
|
70 |
|
Как и выше, eˆno , eˆco можно задать с помощью en1o , en2o и
eсо1 .
Система уравнений, вытекающая из (4) – (5) может быть записана в виде:
|
|
|
|
|
|
|
|
ˆ 1 |
1 |
, |
|
|
|
|
|
|
|
|
|
k |
eˆn = eno |
|
|
|
|
|
|
|
|
|
|
ˆ 2 |
2 |
, |
(4.7) |
|
|
|
|
|
|
|
|
k |
eˆn = eno |
||
|
|
|
|
|
|
|
|
ˆ 1 |
1 |
, |
|
|
|
|
|
|
|
|
|
k |
eˆc = eсо |
|
|
ˆ j |
= {k |
j1 |
, k |
j2 |
, |
k |
j3 |
} – матрица, совпадающая с j-той строкой матрицы К. |
|||
где k |
|
|
|
||||||||
Система, включающая системы (1) и (7), содержит всего шесть уравнений, каждое из которых является нелинейным, поскольку обобщенные координаты qi могут быть аргументами тригонометрических функций. Это вызывает серьезные трудности в их решении этой системы. Системы (1), (7) могут решаться совместно или может решаться одна из систем. Например, при движении схвата в свободном пространстве его ориентация может быть произвольной и в этом случае необходимо решать только систему (1). В этом случае, а также при совместном решении (1) и (7) при более 6 неизвестных qi, число неизвестных больше числа уравнений.
Наличие избыточных известных qi порождает неоднозначность решения, физически объясняемую наличием у ММ маневренности. Одним из путей устранения неоднозначности решения является задание значений qi для некоторых входных звеньев, так чтобы оставшееся число неизвестных было равно числу уравнений решаемой задачи.
Второй путь устранения неоднозначности решения основан на добавлении к рассмотренной системе уравнений недостающих уравнений, составляемых исходя из различных условий. Одним из таких условий может быть, например, обеспе-
71
чение максимального коэффициента сервиса или минимальных нагрузок на элементы кинематических пар и т.п.
Решение обратной задачи необходимо для обеспечения перемещения заданной точки схвата по заданной траектории при произвольной или заданной ориентации схвата. По результатам решения этой задачи для совокупности заданных точек траектории схвата строится закон изменения обобщенных координат qi , при котором реализуется указанная траектория.
4.5.Векторные уравнения кинематики ММ
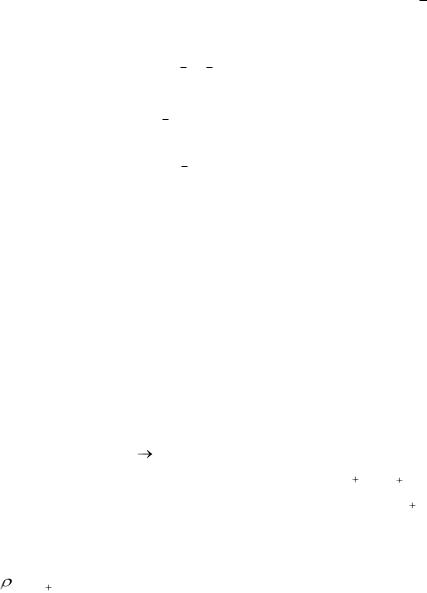
Линейная скорость и ускорение центра масс звена i далее обозначается соответственно через Vi и Wi , а центров кинема-
тических пар символами Vi (.) и Wi (.) , где (.) – буква, обозначающая центр элемента кинематической пары.
Кинематическая пара, соединяющая звенья i и j далее называется i, j -кинематической парой.
Пусть i и εi - абсолютные угловые скорость и ускоре-
ние звена i. Пусть i-1, i кинематическая пара является поступательной и подвижная система отсчета имеет начало в точке А (полюсе) и движется вместе с i-1 звеном. Тогда
|
|
|
|
|
|
|
|
(5.1) |
i = i 1 , εi = εi 1 , |
||||||||
72 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ei , |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Vi =Vi |
1 + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.2) |
|||||||||||||||||||||||||||||||
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|
|
|
i 1,i + qi |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
= |
|
|
|
+ qi e |
|
, V |
|
e |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
i,i |
|
|
|
|
i,i |
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
i |
|
|
|
|
|
i |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
' |
qi ei , |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
i 1,i = ri,i - ri 1,i , |
|
|
Wi |
= ri,i = |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
k =2( |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
e |
|
)=2 q |
|
|
|
|
|
|
|
e ), |
|||||||||||||||||
|
W |
|
|
|
|
|
|
|
|
V |
)=2( |
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
i 1 |
|
|
|
i 1 |
|
i |
|
|
i 1 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
i |
|
|
|
|
|
i |
||||||||||||||||||||||
|
|
e = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
W |
W |
|
|
|
|
|
|
+ |
ε |
i 1 |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
), |
(5.3) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
i 1,i |
|
|
|
|
i 1 |
|
|
|
|
i 1 |
|
|
|
|
|
i 1,i |
|||||||||||||||||||||||||||||||||||
|
i |
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
1 + qi |
ei + 2 qi ( |
|
|
|
|
|
ei )+ |
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Wi |
Wi |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
+ ( |
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
i 1,i )+ |
|
|
|
|
|
i 1 |
|
|
|
|
i 1 |
|
|
i 1,i ). |
|
|
||||||||||||||||||||||||||||||||
Для получения формул кинематики звена i, вращающегося относительно звена i-1 в i-1,i кинематической паре, удобны два подхода. При описании угловых скоростей и ускорений удобно считать, что подвижная система связана с звеном i-1 и звено i вращается относительно этой системы. При определении линейных скоростей и ускорений удобно подвижную систему связывать с звеном i. При этом относительное движение отсутствует. Тогда
|
|
|
|
|
|
|
|
|
e |
= |
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
r = |
q |
e |
, |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
i |
|
i |
i |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ei , |
|
|
|
|
|
(5.4) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i = |
|
|
|
i 1 + qi |
|
|
|
|
|
||||||||||||||||||
|
|
Vi = Vi |
1 - |
|
|
|
|
|
|
|
|
|
|
|
|
1,i + |
|
|
|
|
|
|
|
,i , |
(5.5) |
|||||||||||||||
|
|
|
|
|
i |
1 |
|
|
|
ri |
|
i |
|
|
|
ri |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= |
|
r = |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εi |
|
ei |
, |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
qi |
|
|
|
|
|
|
|
||||||||
|
εie = |
|
|
|
|
|
1 + qi |
|
ei + qi ( |
|
|
|
1 ei ) , |
|
||||||||||||||||||||||||||
|
εi 1 = εi |
|
|
|
|
|
(5.6) |
|||||||||||||||||||||||||||||||||
|
|
|
i |
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= 0, |
|
|
k |
= 0, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
W |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
73 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
* = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
)=W , |
||||
W |
|
W |
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
1 |
|
r |
|
|
1,i |
|
i 1 |
i |
1 |
|
r |
1,i |
|||||||||||||||||||||||||||||||||||||
|
i |
|
|
|
|
|
|
i 1 |
|
|
i |
|
|
i |
|
|
|
|
|
|
|
|
i |
|
A |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
* + |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
W |
= W |
|
ε |
|
|
|
|
|
|
|
+ |
|
|
|
|
( |
|
|
|
|
|
|
|
|
), |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
i |
|
i |
r |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
i |
|
|
|
|
|
i,i |
|
|
|
|
|
|
|
|
|
i,i |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
Wi |
= |
Wi |
1 - |
εi 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,i - |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
ri 1,i + εi |
|
ri |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
- |
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,i )+ |
|
|
|
( |
|
|
|
|
|
,i ). |
(5.7) |
||||||||||||||||||||||
|
|
i 1 |
|
|
|
|
|
i |
1 |
|
|
|
|
|
ri |
|
|
i |
|
i |
ri |
||||||||||||||||||||||||||||||||||
Полученные соотношения являются рекуррентными, что весьма удобно для вычислений на компьютере.
Для вычисления по полученным формулам угловых и линейных ускорений необходимо знание обобщенных ускорений qi - т.е. вторых производных от обобщенных координат по
времени. Величины qi могут быть определены только из ре-
шения задачи динамики ММ или экспериментально, что связано с большими трудностями. Поэтому величины qi при ре-
шении задач кинематики считаются заданными.
|
Выражения для |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
εi и Wi удобно использовать в виде: |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
εi = i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q j + θi + |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
αij |
|
|
ε0 |
(5.8) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
W = |
|
|
|
|
|
|
|
|
q |
|
|
+ |
|
|
|
|
|
+W , |
(5.9) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ij |
|
j |
|
|
|
i |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
i |
j |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
где |
|
ε0 , W0 - |
|
угловое и линейное ускорения базового звена; |
|||||||||||||||||||||||||||||||||||||||
αij , |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
ij - функции обобщенных координат; θi , |
i - функции |
||||||||||||||||||||||||||||||||||||||
обобщенных координат и скоростей. |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
Векторы |
ij |
, |
|
|
|
|
, |
|
θ |
i |
, |
|
|
|
|
|
|
|
|
подлежат определению. Для i- |
||||||||||||||||||||||
|
|
ij |
|
|
|
|
i |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
1,i поступательной пары, согласно (1)
74

|
|
εi = i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εi 1 = i 1 αi 1, j q j + θi 1 + |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ε0 = |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
αij q j + θi + |
ε0 , |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
α |
ii |
=0, |
|
|
α |
ij |
= α |
i |
1, |
j (i |
|
|
|
|
|
j) |
θ = |
θ |
|
|
|
|
|
|
|
|
(5.10) |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
i |
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Подстановка Wi и Wi |
1 в (3) дает |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
+W |
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
+W |
+ |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
ij |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
q j |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
i 1,j q j |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
+( i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
+ θ |
|
|
+ |
|
ε |
|
) |
|
|
|
|
i 1,i |
+ |
|
|
i 1 |
|
|
|
( |
|
|
|
i 1 |
|
|
|
|
i 1,i |
) + |
|||||||||||||||||||||||||||||||||||||
|
|
|
αi 1, j q j |
|
|
|
i 1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
+ qi |
|
|
ei + 2 qi ( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
ei ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
= |
|
|
|
|
1, j + αi |
|
|
1, j |
|
|
|
|
|
|
|
|
|
|
(i |
|
|
|
|
|
j), |
|
|
|
|
(5.11) |
||||||||||||||||||||||||||||||||||
|
|
ii = ei , |
|
|
i j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
1,i |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
i = |
i 1 +( θi 1 + ε0 ) |
|
|
|
i 1,i + |
i 1 |
|
|
|
|
|
|
i 1 |
|
|
i 1,i )+ |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+2 qi ( |
|
|
|
|
|
|
|
|
ei ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.12) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
Для i-1,i вращательной кинематической пары |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
= |
i |
|
|
ε |
α |
ij |
|||
|
i |
|
1 |
||
|
|
j |
|
|
|
Отсюда следует
|
|
|
+ |
|
= i 1 α |
|
|
|
|
|
|
|
|
+ |
|
+ |
|||||
q |
j |
+ θ |
ε |
i |
1, j |
q |
j |
+ θ |
1 |
ε |
|||||||||||
|
|
i |
0 |
1 |
|
|
|
|
i |
0 |
|||||||||||
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ qi |
ei + qi |
|
|
|
ei , |
|
|
|
|
|
|
|
|||||||||
|
i 1 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
αij = αi |
1, j |
при i |
j , αii = ei . |
|
|||||||||||||
|
Из (7), (9) и (13) получается |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
= i |
|
|
|
|
|
|
|
|
|
|
|
|
= i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
q |
|
+ |
|
|
|
+W |
|
|
q |
|
+ |
|
|
+W |
- |
||||||
|
|
ij |
j |
|
i |
i 1,j |
j |
i 1 |
||||||||||||||||||
|
i |
|
|
|
|
0 |
|
|
|
|
0 |
|||||||||||||||
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
j |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
|
|
|
|