

Учебное пособие 1851
.pdfЗвеном механизма называется твердое тело, способное соединиться с другими звеньями подвижными соединителями. Звено может состоять из одного материала или из нескольких твердых тел, неподвижно соединенных друг с другом.
Кинематической парой называется подвижное соединение двух звеньев. Кинематические пары ММ и прочих механизмов одинаковы.
Кинематические пары разделяются на классы и виды. Класс кинематической пары равен числу независимых связей, налагаемых парой на относительное движение звеньев. Существует пять классов кинематических пар.
По числу допускаемых кинематической парой вращатель-
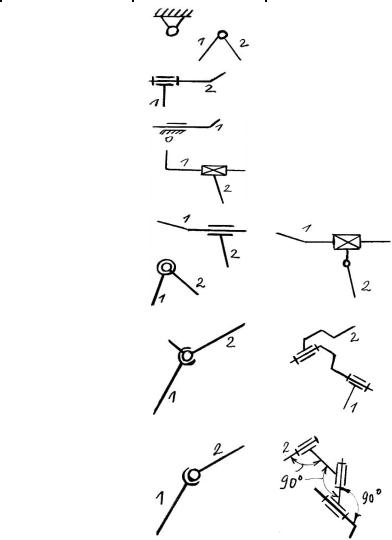
ных движений кинематические пары делятся на виды: первый вид – три вращательных движения, второй – два, третий – одно. На рис. 1.1. показаны основные кинематические пары, использующиеся в механизмах.
Элементом звена называется множество точек, которыми звено может касаться других звеньев.
Элементом кинематической пары называется множество точек контакта, соединяемых парой звеньев, при отсутствии нагрузок на звенья.
Кинематическая пара называется высшей, если ее элементом является точка или линия, и низшей – если ее элементом является поверхность. Вследствие быстрого износа высшие кинематические пары для соединений звеньев ММ не используются. Исключение составляют плоские высшие пары четвертого класса, которые используются в зубчатых и кулачковых механизмах приводов манипуляторов.
Число степеней подвижности w звеньев, входящих в кине матическую пару равно числу степеней свободы, которое имеют соединяемые парой звенья в движении друг относительно друга. Если и– класс кинематической пары, то w=6 – и .
Постоянный контакт звеньев в кинематической паре может
18
|
|
|
Таблица 1.1. |
|
№ |
Класс и название |
Условное |
Эквивалентное |
|
кинематической |
кинематическое |
|||
п/п |
обозначение |
|||
пары |
соединение |
|||
|
|
|||
1 |
V |
|
— |
|
вращательная |
|
|||
|
|
|
||
|
|
|
|
|
2 |
V |
|
— |
|
поступательная |
|
|||
|
|
|
||
|
|
|
|
|
3 |
IV |
|
|
|
цилиндрическая |
|
|
||
|
|
|
||
|
|
|
|
|
|
IV |
|
|
|
4 |
сферическая |
|
|
|
|
с пальцем |
|
|
|
|
|
|
|
|
5 |
III |
|
|
|
сферическая |
|
|
||
|
|
|
||
|
|
|
|
|
|
|
19 |
|
обеспечиваться действием различных сил (силовое замыкание) или формой элементов звеньев (геометрическое замыкание). Геометрическое замыкание более надежно. При изучении механики механизмов используются условные изображения кинематических пар и звеньев. Условные изображения кинематических пар приведены в таблице 1.1.
Звенья механизма могут быть подвижными и неподвижными. Неподвижное звено механизма называется стойкой.
1.2.Кинематические цепи
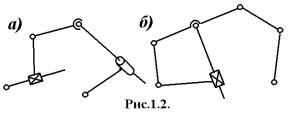
Кинематической цепью называется совокупность звеньев, образующих между собой кинематические пары. Кинематическая цепь называется простой, если она не содержит звеньев, входящих более чем в две кинематические пары (рис. 1.2,а), и сложной в противном случае (рис. 1.2,б).
Кинематическая цепь называется замкнутой, если ее звенья образуют не менее чем один кинематически изменяемый замкнутый контур (рис. 1.2,б) и открытой в противном слу-
чае (рис. 1.2,а).
Кинематическая цепь называется плоской, если еѐ звенья движутся параллельно некоторой плоскости (рис. 1.2,б) и пространственной в противном случае (рис. 1.2,а). Кинематическая цепь, имеющая n звеньев, называется n - звенной.
Структурная схема кинематической цепи указывает типы и взаимное расположение кинематических пар и звеньев.
Удобно различать собственную структурную схему ММ (СССММ), образуемую его звеньями друг с другом, и функциональную структурную схему ММ (ФССММ), которая содержит СССММ, объект манипулирования (ОМ) и кинематические пары, реализующие связи, налагаемые на ОМ при вы-
20
полнении рабочих операций. Классы подобных кинематических пар могут изменяться в процессе работы ММ (например при сборке деталей или покраске) и это приводит к изменению ФССММ, а значит и к изменению структуры ММ.
Кинематическая схема кинематической цепи содержит в себе информацию о структурной схеме этой цепи и о геометрических размерах звеньев. Поэтому кинематическая схема кинематической цепи строится в масштабе.
В основе ММ лежат, как правило, простые, открытые кинематические цепи. Кроме этого кинематические цепи ММ имеют значительно большее число степеней подвижности (до десяти и более) в сравнении с кинематическим цепями обычных механизмов.
Кинематические цепи шагающих (локомоционных) роботов являются, как правило, сложными кинематическим цепями.
Структурная и кинематическая схемы кинематической цепи могут быть изображены графически или описаны системами чисел. Последнее представление структурных и кинематических схем особенно удобно для пространственных кинематических цепей.
1.3.Степени подвижности кинематической цепи
Втрехмерном пространстве система из m свободно движущихся звеньев имеет 6m степеней подвижности. При соединении этих звеньев в кинематическую цепь на их относительные движения налагаются связи, число которых равно
5
i Pi ,
i 1
где Pi – число кинематических пар i-то класса.
Каждая связь уменьшает число степеней подвижности на единицу. Если одно из звеньев кинематической цепи условно
21
считать неподвижным, приняв его за стойку, то число неподвижных относительно стойки звеньев будет равно n=m-1. Число степеней подвижности пространственной кинематической цепи относительно стойки определяется формулой СомоваМалышева
5
w = 6n - i Pi. |
(1) |
i 1
Для кинематической цепи (рис. 1.2, а) n=5
P1=P2=0, P3=1, P4=1, P5=4, w = 6 5 - 3 1 - 4 1 - 5 4 = 3.
Число степеней подвижности плоских кинематических цепей определяется по формуле Чебышева
w=3n - 2P5 - P4. |
(2) |
Для ММ универсальных ПР w |
7. Такие механизмы имеют |
по три и более вращательных и поступательных степеней подвижности.
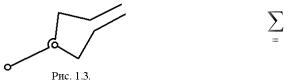
При определении степени подвижности ММ не учитывается одна степень подвижности, необходимая для управления схватом, который является по сути дела отдельным механизмом. Таким образом, при анализе структуры и кинематики ММ схват считается твердым телом. На рис. 1.3 показана упрощенная кинематическая схема схвата.
Входным движением называется движение, сообщаемое некоторому звену кинематической цепи приводным механизмом. Звено, совершающее входное движение, называется
входным.
Звено механизма, выполняющее движения, для совершения которых предназначен механизм, называется выходным звеном. В ММ выходным звеном является схват.
Объектом манипулирования (ОМ) называется любое тело или устройство, перемещаемое манипулятором с помощью схвата.
22
Механизмом называется кинематическая цепь, число степеней подвижности которой равно числу входных движений. Таким образом, в механизме все звенья совершают вполне определенные движения, зависящие от движений входных звеньев.
Манипуляционным механизмом называется механизм, предназначенный для воспроизведения двигательных функций человеческой руки в процессе производства.
1.4.Структурная и кинематическая схема механизма
Структуру, кинематику и динамику механизмов удобно исследовать используя условные изображения звеньев и кинематических пар. Для исследования структуры механизма достаточно иметь структурную схему механизма, т.е. его схему, указывающую стойку, типы кинематических пар, входные и подвижные звенья и их расположение. Кинематическая схема
23

механизма включает структурную схему механизма и информацию о параметрах звеньев.
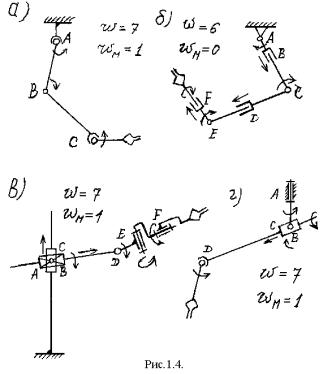
Примеры кинематических схем некоторых ММ указаны на рис. 1.4, где стрелками указаны входные звенья, а большими латинскими буквами – кинематические пары. Стойка механизма помечается штрихами.
1.5. Замена кинематических пар k-того класса эквивалентными кинематическими цепями
При исследовании кинематики и динамики ММ удобно рассматривать механизмы только с кинематическими парами V класса. Если в ММ имеются кинематические пары k-того класса, то их заменяют эквивалентными кинематическими цепями, содержащими только кинематические пары V класса. Например, кинематическую пару III класса (сферический шарнир) можно пред-
ставить в виде кинематической цепи из двух звенев нулевой длины, соединенных друг с другом и с основными звеньями, тремя вращательными кинематическими парами V класса (рис. 1.5,а), а кинематическая пара IV класса (цилиндрическая) – в виде одного звена нулевой длины, входящего в поступательную и вращательную кинематические пары V класса (рис.1.5,б). При замене кинематических пар класса k нужно располагать оси элементов кинематических пар V класса так, чтобы они в совокупности обеспечивали те же движения, что и заменяемая кинематическая пара.
При дальнейшем изложении рассматриваются кинематические цепи только с кинематическими парами V класса, т.е. предполагается, что кинематические пары класса k заменены парами V класса
24
1.6.Структурный анализ и синтез механизмов
Структурный анализ механизмов изучает состав и внутреннее строение механизмов, определяющие их структуру.
Структура механизма позволяет выделить среди множества механизмов различные классы механизмов, несмотря на различие их функций, геометрических и других параметров. Класс механизма определяет методы исследования кинематики
идинамики механизма.
Вотличие от структурного анализа, структурный синтез изучает способы создания механизмов с заданной структурой. Поскольку структура механизма в значительной мере определяет его свойства, проектирование механизма начинается со структурного синтеза, т.е. с составления структурной схемы механизма.
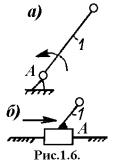
Простейший или начальный механизм
(рис. 1.6) образуется присоединением входного звена к стойке или другому звену кинематической парой V класса. Число степеней подвижности такого механизма равно единице. Начальными механизмами являются вращательные механизмы пневмо -, гидро-, и электродвигателей, а также поступательные механизмы пневмо- и гидроцилиндров. В ММ число начальных механизмов равно числу его степеней подвижности.
Группой Ассура (структурной группой) называется кинематическая цепь, имеющая нулевое число степеней подвижности после присоединения еѐ свободными кинематическим парами к стойке, и не распадающаяся на более простые группы Ассура. Более сложные механизмы получаются присоединением к начальному (или начальным механизмам) дополнительных структурных групп, или других начальных механизмов.
25

Число звеньев nA и число кинематических пар V класса в группах Ассура удовлетворяют соотношениям:
для пространственных механизмов
6 nA – 5P5 = 0 ;
для плоских механизмов nA – 2P5 = 0.
Следовательно, простейшая пространственная группа Ассура имеет 5 звеньев, которые образуют кинематических пары V класса между собой. Крайние звенья группы (1 и 5) образуют две кинематические пары с прочими звеньями кинематической цепи. Плоская группа Ассура имеет два звена, входящие в три кинематических пары V класса (рис.1.7). Эти структурные группы относятся ко второму классу. Существуют структурные группы третьего и более высоких классов.
Класс механизма равен наивысшему из классов групп Ассура, на которые этот механизм может быть расчленен. Класс механизма характеризует сложность структуры механизма. Основной задачей структурного анализа является определение класса механизма.
Структура ММ обычно проще структуры прочих механизмов, так как обычно каждое звено ММ имеет свой привод. Поэтому ММ состоит обычно из w начальных механизмов, и поэтому, условно считается механизмом I класса.
26

2.МАТЕМАТИЧЕСКАЯ МОДЕЛЬ МЕХАНИЗМА
2.1.Базовая и связанная системы координат
Размеры, положение и ориентацию элементов звеньев, положение центра масс и инерционные характеристики звена во
вращательном движении удобно задавать в системе координат
~
Zi , неподвижной относительно звена i. Для исследования ди-
намики ММ удобно использовать систему координат, оси которой проходят через центр масс звена и являются главными осями инерции звена. Такая главная центральная система ко-
ординат далее обозначается через Zi |
, а ее оси – через zij |
|
~ |
|
|
(j=1,2,3). Системы координат Zi |
и Zi |
называются связанными |
системами координат.
Базовым звеном ММ называется либо неподвижное звено ММ, либо звено, несущее на себе прочие звенья ММ. Базовое звено может передвигаться по производственному помещению. Система координат Z0 с осями Zоj (j=1,2,3), связанная с
базовым звеном, называется базовой. В базовой системе координат удобно описывать положения, скорости и ускорения схвата и объекта манипулирования, которым может считаться любой перемещаемый или обрабатываемый объект.
|
Неподвижная система координат обозначается символом |
о |
о |
Z . В большинстве случаев базовое звено неподвижно и Z и Z0 совпадают.
Для описания процесса сборки ММ удобна система координат Z i , которая является главной центральной системой ко-
ординат звена и связана с звеном. После сборки Z i превращается в Zi .
2.2. Преобразование проекций векторов
Пусть система координат Zj с осями zjк (k=1,2,3) и система
27