

Структура, характеристики и кинематика манипуляционных механизмов. Рябцев В.А
.pdfВ.А. Рябцев
СТРУКТУРА, ХАРАКТЕРИСТИКИ И КИНЕМАТИКА МАНИПУЛЯЦИОННЫХ МЕХАНИЗМОВ
Учебное пособие
Воронеж 2000
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
В.А. Рябцев
СТРУКТУРА, ХАРАКТЕРИСТИКИ И КИНЕМАТИКА МАНИПУЛЯЦИОННЫХ МЕХАНИЗМОВ
Учебное пособие
ВОРОНЕЖ 2000

УДК 539.3/6
Рябцев В.А. Структура, характеристики и кинематика манипуляционных механизмов: Учеб. пособие. Воронеж: Изд-
во ВГТУ, 2000. 96с.
Учебное пособие включает материал по структуре, основным характеристикам манипуляционных механизмов, преобразованиям проекций векторов из одних систем координат в другие системы, точности и кинематике пространственных многозвенных манипуляционных механизмов. Издание соответствует рабочей программе дисциплины «Прикладная механика» и предназначено для студентов специальности 210300 «Роботы и робототех-нические системы» дневной и вечерней форм обучения.
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD 97 и содержится в файле
«PosobMM.rar».
Табл. 1. Ил. 24. Библиогр.: 8 назв.
Научный редактор канд. физ.-мат. наук В. Н. Потапов.
Рецензенты: кафедра теоретической механики Воронежской технологической академии (заведующий кафедрой д-р техн. наук В. Н. Колодежнов); д-р техн. наук В. Н. Колодежнов
Издается по решению редакционно - издательского совета Воронежского государственного технического университета.
Рябцев В. А., 2000
Оформление. Издательство Воронежского государственного технического университета, 2000
3
4
ПРЕДИСЛОВИЕ
Предлагаемое учебное пособие включает материал по механике манипуляционных механизмов, относящийся к разделу курса прикладной механики «Манипуляционные механизмы». Основная часть этого материала основана на идеях и подходах, принятых в [5], где они изложены в кратком справочном виде, практически не доступном для студентов. Основной недостаток прочей литературы – использование подходов, приводящих к трудно алгоритмизируемым соотношениям, использование которых при решении практических задач приведет к ошибкам либо на стадии аналитического решения задачи, либо при программировании вычислений на ЭВМ.
При работе над пособием студент обязан сначала хорошо освоить аппарат теории матриц и символику обозначений, принятую при изложении материала
В пособии рисунки нумеруются так, что первая цифра номера рисунка совпадает с номером раздела, к которому относится рисунок. Например, рис. 8.5 указывает на пятый рисунок из восьмого раздела.
Формулы нумеруются так, что первая цифра номера рисунка совпадает с номером подраздела, к которому относится формула. Ссылки на эту формулу могут выглядеть различно в зависимости от места, из которого производится ссылка. Например, формула 8 указывает на восьмую из данного подраздела, формула (2.8) указывает на восьмую формулу из второго подраздела, формула (3.2.8) указывает на восьмую формулу из второго подраздела третьего раздела.
В качестве упражнений при освоении материала пособия необходимо использовать методические указания [8], которые содержат примеры решения типовых задач по некоторым разделам пособия, а также методические указания [7], которые содержат задания на ИРС, включающие теорию и алгоритмы
5
решения основных задач теории манипуляционных механизмов.
6
В Е Д Е Н И Е
Роль промышленных роботов (ПР) и манипуляторов (ПМ) в обеспечении технического прогресса
Манипулятором (М) называется механизм, имитирующий двигательные или рабочие функции руки человека и управляемый оператором или автоматически.
Промышленный робот (ПР) – это автономно функционирующая машина – автомат, предназначенная для воспроизведения некоторых двигательных функций руки человека в процессе труда и наделенная некоторыми способностями человека (силой, памятью, логикой и т.п.), а также способностью к обучению.
Каждый ПР содержит в себе манипулятор. ПР применяется как средство повышения производительности и качества человеческого труда при обеспечении его безопасности, комфортабельности и высокого интеллектуального уровня. При этом могут использоваться как отдельные ПР так и группы ПР. Особый эффект достигается при использовании ПР в составе автоматических линий.
ПР используются как в вспомогательном производстве (подъемно-транспортные, складские и погрузочноразгрузочные работы), так и в основном производстве (сварка, клѐпка, сборка и окраска деталей, узлов и машин)
ПР оказываются незаменимыми при проведении опасных для жизни человека работ в условиях высоких температур, вакуума, под водой, вблизи источников опасных излучений, в местах недоступных для человека.
ПР позволяет завершить процесс комплексной автоматизации производственных процессов, устраняя человеческий труд в автоматизированном производстве и, тем самым, повышая загрузку технологического оборудования.
7
Из изложенного видно влияние ПР на показатели производственных процессов, но не менее важно влияние ПР на человека и общество в целом, поскольку ПР, освобождая человека от тяжелого, утомительно или опасного труда, не только сохраняет здоровье человека, но и позволяет ему заняться более интеллектуальным трудом. Таким образом, применение ПР благотворно влияет на технический и человеческий факторы, являющиеся движущими силами технического прогресса.
Особенности ПР как средства автоматизации производственных процессов
Как уже отмечалось ПР и ПМ позволяют освобождать человека от выполнения основных и вспомогательных процессов, предоставив ему функции общего контроля, наладки и ремонта машин-автоматов и автоматических линий.
Использование ПР и ПМ в составе автоматизированных комплексов приобретает важнейшее значение, позволяя на их основе создавать гибкие автоматизированные производства
(ГАП), т.е. такие единицы производственной структуры, как участки, цехи и заводы, в которых работа всех подсистем управляется как единое целое автоматической системой управления (АСУ). Основная особенность ГАП – быстрая перестройка технологии при изменении производимой продукции. Широкое использование ПР и ПМ в ГАП позволяет выпускать малосерийную или даже штучную продукцию.
Наиболее эффективно применение ПР и ПМ для автоматизации достаточно крупных технологических линий.
Цели и задачи раздела «Манипуляционные механизмы»
Раздел «Манипуляционные механизмы» является частью курса прикладной механики. По назначению он является одним из первых специализированных курсов для студентов специальностей робототехнические системы. Основная цель раздела - дать понятие о структуре, кинематике, динамике и
8
конструкциях элементов манипуляционных механизмов (ММ). Основное внимание уделяется динамике ММ, поскольку только методы динамики позволяют получать информацию для проведения прочностных расчетов ММ, подбора двигателей и проектирования приводных устройств. Будет построена математическая модель ММ и изучены аналитические методы кинематики ММ, ориентированные на использование ЭВМ.
Раздел ММ естественно и тесно связан с другими дисциплинами. С одной стороны он связан с дисциплинами, методы которых используются при его изучении: теоретической и прикладной механикой и высшей математикой, включая такие ее разделы как векторное исчисление, теория матриц, дифференциальные уравнения и др. С другой стороны раздел ММ связан с другими специальными дисциплинами, которые используют излагаемую информацию при изучении элементов ММ и систем управления ПР.
Отличительной особенностью раздела ММ является широкое применение векторного и матричного исчисления в задачах кинематики и динамики ММ, что объективно затрудняет его изучение.
Приведенная ниже литература может рассматриваться только как дополнительная к изучению некоторых вопросов и тем раздела, поскольку содержит либо отрывочные сведения [1-4], либо перегружена деталями [5,6], которые невозможно рассмотреть в рамках времени, отведенного на изучение раздела.
9
1. СТРУКТУРНЫЙ АНАЛИЗ МАНИПУЛЯЦИОННЫХ МЕХАНИЗМОВ
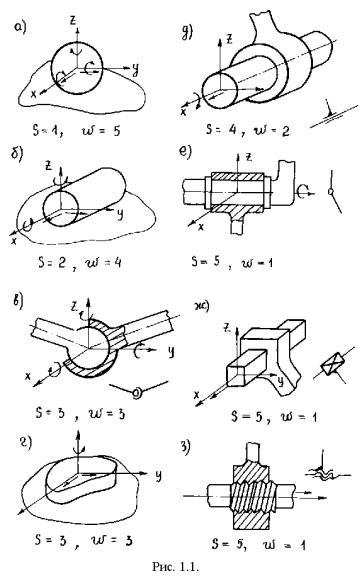
1.1 Кинематические пары
17