

Учебное пособие 1085
.pdfНечеткие отношения предпорядка – это то, которое обладает свойствами транзитивности и рефлективности.
Нечеткое отношение нестрогого порядка – это то, которое обладает свойствами транзитивности, антисимметричности и рефлективности.
Нечеткое отношение строгого порядка – транзитивное, антисимметричное и антирефлексивное отношение.
Рефлексивное и симметричное отношение называется отношением сходства.
Нечеткое отношение, обладающее свойствами рефлективности, симметричности и транзитивности называются отношениями подобия (нечетким отношением эквивалентности)
41

5. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ГРАФОВ.
5.1. Задачи теории графов.
Теория графов - это раздел математики, изучающий системы связей между различными объектами, точно так же как это делается с помощью понятия отношения. Однако независимое определение графа упрощает изложение теории и делает её более понятной и наглядной.
Первые задачи теории графов были связаны с решением развлекательных задач и головоломок.
Первая задача. Задача о Кенигсбергских мостах была поставлена и решена Эйлером в 1786 году. Город располагался на берегах и двух островах реки Преголи. Острова между собой и берегами были связаны семью мостами, как показано на рисунке.
Рис. 8 Возникал вопрос: можно ли выйдя из дома, вернуться
обратно, проходя по каждому мосту ровно один раз? Вторая задача. Задача о трех домах и трех колодцах.
Имеется три дома и три колодца.
Рис. 9
42

Требуется провести от каждого дома к каждому колодцу тропинку так, чтобы тропинки не пересекались. Задача была решена Понтрягиным и независимо от него Куратовским в 1930 году.
Третья задача. О четырех красках. Любую карту на плоскости раскрасить четырьмя красками так, чтобы никакие две соседние области не были закрашены одним цветом.
4
2
1
3
Рис. 10 Многие результаты теории графов используются для
решения практических задач науки и техники. Так, в середине 19 века Кирхгоф применил теорию графов для расчета сложных электрических цепей. Однако, как математическая дисциплина, теория графов сформировалась только в 30-ых годах 20-го века. При этом графы рассматриваются как некоторые абстрактные математические объекты. Они применяются при анализе и синтезе цепей и систем, в сетевом планировании и управлении, исследовании операций, программировании, моделировании жизнедеятельности организма и других областях.
5.2. Основные определения.
ГрафомG=(V,E) называется совокупность двух множеств - непустого множества вершин V и множества неупорядоченных и упорядоченных пар вершин E. В дальнейшем будут рассматриваться конечные графы, т.е. графы с конечным множеством вершин и конечным семейством пар. Не-
43
упорядоченная пара вершин называется ребром, а упорядоченная - дугой.
Обычно граф изображается диаграммой: вершины - точками (или кружками), ребра – линиями произвольной конфигурации. На дуге дополнительно стрелкой указывается её направление. Отметим, что при изображении графа несущественны геометрические свойства ребер (длина, кривизна), а также взаимное расположение вершин на плоскости.
Вершины, которые не принадлежат ни одному ребру (дуге) называются изолированными. Вершины, соединенные ребром или дугой называются смежными. Ребро (дуга) и любая из его двух вершин называются инцидентными.
Говорят, что ребро (u,v) соединяет вершины u и v, а дуга (u,v) начинается в вершине uи заканчивается в вершине v, при этом u называется началом, а v – концом этой дуги.
Граф, содержащий только ребра, называется неориентированным (неорграф, н-граф). Граф, содержащий только дуги, называется ориентированным (орграфом). Граф называется смешанным, если в нём одновременно присутствуют и ребра и дуги.
Пара вершин может соединяться двумя или более ребрами (дугами одного направления). Такие ребра (дуги) называются кратными. Дуга (или ребро) может начинаться или кончаться в одной и той же вершине. Такая дуга (ребро) называется петлёй. Граф, содержащий петли, называется псевдо графом. Граф, имеющий кратные ребра (дуги), называется мультиграфом.
Граф, без петель и кратных ребер, называется простым. Простой граф называется полным, если для любой пары его вершин существует ребро (дуга) их соединяющая. Полный граф, имеющий n вершин обозначается через Kn. Например, это графы
44

K1 K2
K3 K4
Рис. 11 Граф, состоящий из одной изолированной вершины
(K1), называется тривиальным.
Дополнением графа G называется граф G , имеющий те же вершины, что и граф G и содержащий те ребра, которые нужно добавить к графу G чтобы получить полный граф.
Каждому неорграфу канонически соответствует ориентированный граф с тем же множеством вершин, в котором каждое ребро заменено двумя дугами, инцидентными тем же вершинам и имеющих противоположные направления.
5.3. Степени вершин графа.
Степенью (валентностью) (обозначение d(v) илиdeg(v)) вершины v простого графа G называется число ребер или дуг инцидентных данной вершине v. При подсчете валентности вершин псевдографа следует учитывать каждую петлю дважды.
Если степени всех вершин н-графа равны k, то граф называется регулярным (однородным) степени k. Если степень вершины равна 0, то она является изолированной. Если степень вершины равна 1, то вершина называется концевой (висячей, тупиковой).
Для орграфа число дуг исходящих из вершины v на-
зывается полустепенью исхода d (v), а входящих – полусте-
пенью захода d (v), При этом справедливо соотношение d(v)= d (v)+ d (v).
45
Теорема Эйлера: Сумма степеней вершин графа рав- n
на удвоенному количеству ребер, т.е. d(vi) 2m, или i 1
n n
d (vi) d (vi) 2m, где n – число вершин; m – чис- i 1 i 1
ло ребер (дуг). Данное утверждение доказывается тем, что при подсчете суммы степеней вершин каждое ребро учитывается два раза - для одного конца ребра и для другого.
5.4. Изоморфизм графов.
Граф называется помеченным (или перенумерованным), если его вершины отличаются друг от друга какими либо пометками (номерами). Граф считается полностью заданным в строгом смысле, если нумерация его вершин и ребер фиксирована. При этом графы G1 и G2 называются равными (обозначение G1 = G2), ,если их множества вершин и ребер совпадают. Два графа или псевдографа G1=(V1,E1) и G2=(V2,E2) называются изоморфными (обозначение G1 G2
), если существуют два взаимно однозначных отображения: 1) :V1 V2 и 2) :E1 E2 такие, что для любых двух вершин u,v в графе G1 справедливо соотношение
((u,v)) ( (u), (v)).
Два простых графа (без петель и кратных ребер) G1 и G2 оказываются изоморфными, если существуют взаимно однозначное отображение :V1 V2 , такое что
(u,v) ( (u), (v)). Таким образом, изоморфными являются графы, которые отличаются только нумерацией вершин и ребер. Изоморфизм графов представляет собой отношение эквивалентности, поскольку оно обладает свойствами:
46
1) Рефлексивности - G1 G1 , причем биекция представляет собой тождественную функцию.
2) Симметричности. Если G1 G2 с биекцией , то
G G с биекцией 1 . |
|
|
|
|
2 |
1 |
|
G1 G2 |
с биекцией 1,а |
|
3) Транзитивности. |
Если |
||
G2 |
G3 с биекцией 2 , то |
G1 G3 |
с биекцией 2 ( 1). |
|
5.5. Матричные способы задания графов.
Матрицей смежности графа G=(V,E) с n вершинами называется квадратная матрица А порядка n, элементы которой определяются следующим образом:
а) в случае неориентированного графа
|
1, если вершиныvi и |
vj смежны, |
|
ai, j |
впротивномслучае; |
||
|
0, |
||
б) для ориентированного графа |
|
||
1, |
если существуетдуга извершины vi ввершину vj , |
||
ai,j |
- |
|
впротивномслучае; |
0 |
|
||
в) в мультиграфеai, j = k, где k – кратность ребра (vivj). |
|||
|
v1 |
e1 |
|
|
|
|
|
|
e7 |
v2 |
|
|
|
|
|
|
e8 |
e3 |
e4 |
|
e2 |
v3 |
|
|
v6 |
||
|
e9 |
e5 |
|
|
v4 |
e6 |
v5 |
|
|
||
Рис. 12
47
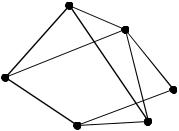
Пример. Для графа изображенного на рисункематрица смежности имеет вид
0 |
1 |
0 |
0 |
1 |
1 |
||
|
|
0 |
1 |
0 |
1 |
|
|
1 |
1 |
||||||
|
0 |
1 |
0 |
1 |
0 |
0 |
|
A |
|
0 |
1 |
0 |
1 |
|
|
0 |
1 |
||||||
11 0 1 0 0
1 1 0 1 0 0
Свойства матрицы смежности: Матрица смежности неориентированного графа является симметричной относительно главной диагонали. Диагональные элементы этой матрицы указывают на наличие петель в соответствующем графе.
Сумма элементов матрицы А неориентированного графа по i-ой строке (или i-му столбцу) равна d(vi). Для ориентированного графа сумма элементов матрицы А по i-ой строке равна d (vi), а по j-му столбцу d (vj).
Графы изоморфны тогда и только тогда, когда их матрицы смежности получаются друг из друга одновременной перестановкой строк и столбцов (i, j строк и i, j столбцов).
Объём памяти для матрицы смежности – О(n2) Матрицей инцидентности графа G=(V, E) с n верши-
нами и m ребрами называется матрица В размера n×m, элементы которой определяются следующим образом:
1, |
есливершинаvi |
инцидентна ребруej, |
|
bi, j |
0 |
- |
впротивномслучае. |
|
|||
а) для неориентированного графа б) для ориентированного графа
48
1, есливершинаvi являетсяначаломдугиej,
bi, j 1, есливершинаvi служитконцомдугиej,
0, есливершинаvi неинцидентнадугеej.
Например, для графа предыдущего примера:
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
||
|
|
0 |
1 |
1 |
0 |
0 |
0 |
1 |
|
|
1 |
0 |
|||||||||
|
0 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
|
B |
|
0 |
0 |
0 |
1 |
1 |
0 |
0 |
|
|
0 |
1 |
|||||||||
|
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
|
|
|
|||||||||
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
|
|
|
|||||||||
Заметим, что мультиграфы изоморфны тогда и только тогда, когда их матрицы инцидентности получаются друг из друга некоторыми перестановками строк или столбцов.
Объём памяти для матрицы инцидентности – О(nm)
5.6. Основные операции над графами.
Объединением графовG1=(V1, E1) и G2=(V2, E2) называется граф G3=(V1 V2, E1 E2). Объединение называется дизъюнктным , если V1 V2=0.
Пересечение графовG1=(V1, E1) и G2=(V2, E2) называ-
ется граф G3=(V1 V2, E1 E2).
Аналогично определяются объединение, дизъюнктное объединение и пересечение любого количества графов. Операции объединения и пересечения являются коммутативны-
ми, т.е. G1 G2= G2 G1, а также G1 G2= G2 G1
Пример. На ниже приведённом рисунке показаны: а) – граф G1, б) – граф G2, в) – их объединение, г) – пересечение.
49

v1 |
|
e1 |
v2 |
v1 |
e1 |
|
v2 |
v1 |
|
e1 |
|
v2 |
|
v1 |
|
v2 |
||
e5 |
|
e4 e2 |
|
|
e5 |
|
e9 |
|
e8 |
e5 |
|
e9 |
|
e8 |
e2 |
e5 |
|
v4 |
v3 |
|
e3 |
|
v4 |
v3 |
|
e3 |
|
v4 |
v3 |
|
e3 |
|
v4 |
|
v3 |
|
e3 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
e10 |
e6 |
|
|
e7 |
|
e6 |
|
|
|
|
|
e6 |
||||
e7 |
|
e6 |
|
v6 |
v5 |
|
|
v6 |
v5 |
|
e10 |
|
v6 |
|
v5 |
|
v6 |
|
v5 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|
|
|
|
в) |
|
|
|
|
|
г) |
Рис. 13 Удаление вершины. При удалении вершины из графа
удаляются и все инцидентные ей рёбра (дуги).
Удаление ребра (дуги). При удалении ребра (дуги) его концевые вершины не удаляются. Операцией обратной к операции удаления ребра является операция добавления ребра.
Слияние (отождествление) вершин. Говорят, что вершины vi и vjв графе G отождествляются (сливаются) если они заменяются новой вершиной vk такой, что все ребра (дуги) графа инцидентные vi и vjстановятся инцидентными к вершине vk.
Стягивание ребра – эта операция означает удаление ребра и отождествление его концевых вершин. Граф G называется стягиваемым графу Н, если граф Н может быть получен из G в результате некоторой последовательности стягиваний ребер.
Подразбиение ребра. При выполнении этой операции из графа удаляется ребро (vi, vj) и добавляются два новых (vi, vk) и (vk, vi), где vk – новая вершина графа.
50