

7 Требования, предъявляемые к системе управления мехатронной системой
Пульты управления должны удовлетворять требованиям ГОСТ 12.2.049-80, 12.2.032-78. Компоновка органов управления на пультах должна соответствовать установленному, для данного робота порядку, выполнения операций. Форма и размеры органов управления и зажимных рукояток, а также усилия, прилагаемые к ним, должны соответствовать ГОСТ 21752-76 и ГОСТ 12.2.009-99. Кнопки, кнопочные переключатели и кнопочные пульты управления должны соответствовать ГОСТ Р 50030.5.1-99, рычаги и рычажные переключатели – ГОСТ 21753-76. Кнопки аварийного отключения оборудования следует установить вблизи постоянных рабочих мест или часто обслуживаемых опасных узлов для быстрого воздействия на них. Рукоятки и рычаги управления должны быть снабжены фиксаторами, исключающими их самопроизвольное или случайное включение. Посты управления должны быть расположены в местах с хорошим сектором обзора обслуживаемого оборудования или должны быть оборудованы устройствами, обеспечивающими обзор участков рабочего пространства. Пульты управления должны оборудоваться избирательной системой связи для ограждения операторов от излишней информации. Не следует устанавливать на рабочем месте более одного источника речевой сигнализации. Для предотвращения случайного включения агрегатов при их осмотре и ремонте пусковые устройства должны быть оснащены жетоном-биркой или жетоном-биркой и ключом-биркой.
8 Вопросы автоматизации
Робот-манипулятор IRB 6640 работает по запрограммированной в нём программе. При остановке движения робота, прерывая подачу электропитания на моторах, робот может покинуть свой запрограммированный путь. Это может произойти после неконтролируемой аварийной остановки или остановки безопасности. Допустимое отклонение настраивается в параметрах системы. Расстояние может быть различным, в зависимости от режима работы. Если робот не находится на допустимом расстоянии, вы можете выбрать, должен ли он вернуться к запрограммированному пути или продолжить его до следующей запрограммированной точки пути. Затем выполнение программы будет автоматически продолжено с запрограммированной скоростью. Система управления робота представлена на рисунке 7
Этот параметр предоставляет возможность переместить робота после перезапуска программы робота из любой автоматически приближенной позиции в «HOME-Position», используя существующие процедуры перемещения. Если захват удерживает детали, их можно разгрузить определенным образом в указанном положении. Если у робота отсутствуют сигналы для продолжения работы программы или нет в «HOME-Position» для перезапуска, роботу поступит приказ, чтобы он прервал свою текущую операцию и перешёл в «HOMEPosition», инициировав запрос «Робот на главную позицию». Чтобы робот мог автоматически перемещаться из своего последнего положения в положение «Домой», он не должен быть больше, чем на 150 мм от положения, к которому он подошел в последний раз. Если робот был перемещен из этого диапазона (путем ручного перемещения), функция «Homepos-Running» дезактивируется, и робот может быть возвращен только в «HOME-Position» путем прямого инициирования вручную.
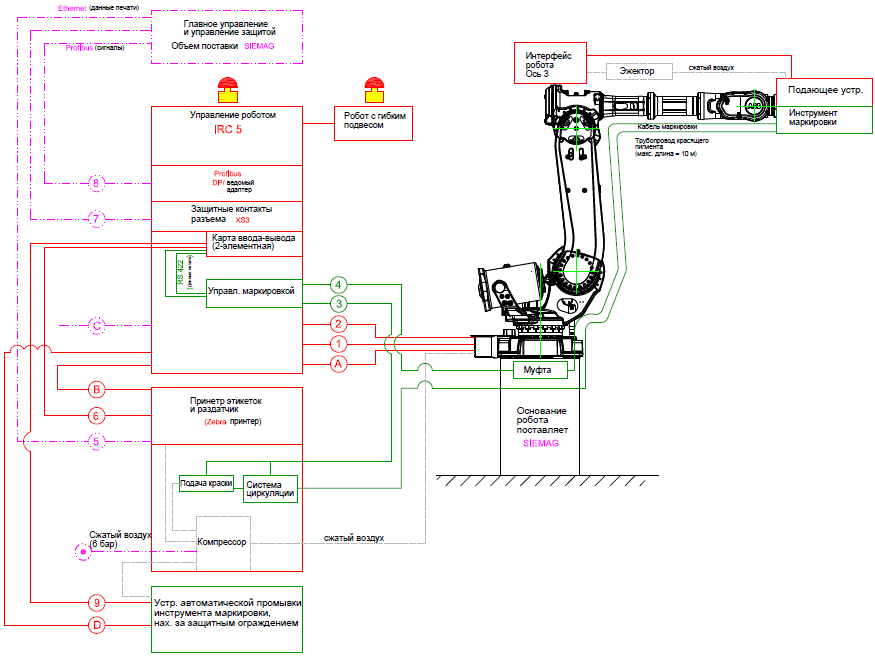
Рисунок 7 – Блок-схема робота-макировщика IRB 6640