

1.14 Секция моталок
Секция моталок оборудована двумя моталками.
Полоса проходит один комплект тянущих роликов до электростатического промасливателя.
После промасливателя установлены летучие кривошипные ножницы, которые делят полосу, отрезают сварные швы и производят отбор проб.
Сварные швы и обрезь концов рулонов сбрасываются в скрапной короб. Отрезанные образцы отводятся в отдельный лоток.
Отклоняющий тянущий ролик, устанавливаемый перед каждой моталкой, отклоняет полосу на барабан и вводит полосу в узел моталки. Смотка рулонов производится под контролем выравнивания кромки. Для смотки первых витков применяется ленточный захлёстыватель.
Смотка рулонов может производиться в двух направлениях - сверху и снизу.
Внешний подшипник держит внешний конец барабана моталки во время смотки.
Прижимной ролик служит для смотки последних витков, а также для прижатия их к рулону.
Тележки для рулонов снимают готовые рулоны с разматывателей и отвозят их на место временного складирования. Передаточная тележка №2 для рулонов забирает рулоны с места промежуточного складирования на место складирования. Там происходит взвешивание, автоматическая обвязка и маркировка рулонов.
Мостовой кран складского пролёта для готовой продукции снимает готовые рулоны с установочных платформ.
2 Последовательность выполнения технологических операций
Если рулон находится на позиции маркировки/этикетирования, робот получает стартовый сигнал от программируемого контроллера. Рука робота с вакуумной плитой перемещается к передаточной позиции принтера этикеток, где уже распечатана этикетка с соответствующими техническими данными рулона. Включается вакуум и этикетка присасывается. Теперь рука робота перемещается к позиции периметра рулона, к месту крепления этикетки. Одновременно производится проверка наружного диаметра рулона с помощью оптоэлектронного датчика, закрепленного на держателе вакуумной плиты. Этикетка прикрепляется и вакуум отключается. Рука робота отводится от поверхности рулона примерно на 100 мм и удерживающая головку рамка, закрепленная на поворотной руке робота, поворачивается вместе с маркировочной головкой в рабочую позицию. Высота знаков предварительно настроена на определенное значение через угол поворота рамки робота. Рука робота перемещается в стартовую позицию маркирования по периметру и печатающая головка приводится в действие. Маркировка наносится во время движения руки робота на постоянном, параллельном поверхности рулона расстоянии. В зависимости от ширины рулона маркировка наносится в одной или двух строках. После этого рука робота перемещается к торцевой стороне рулона, где наносится еще одна маркировка таким же образом, как описано выше. После нанесения комплектной маркировки рука робота возвращается в исходное положение и на программируемый контроллер системы транспортировки подается сигнал.
3 Характеристика основного технологического оборудования
3.1 Промышленный робот irb 6640
Промышленный робот IRB 6640 имеет шесть осей вращения (Рисунок 1). Он основан на проверенных компонентах от более ранних поколений, чтобы обеспечить простоту обслуживания и обмена, а также высокое время.
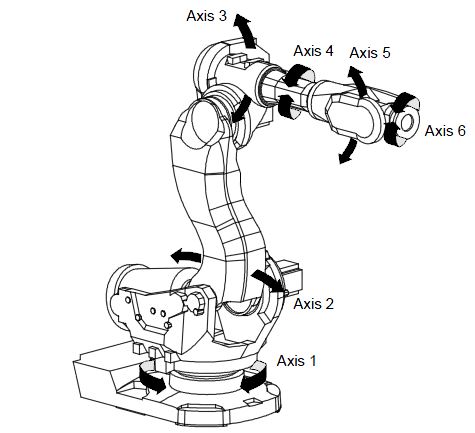
Рисунок 1 – промышленный робот IRB 6640
Удлинители верхнего плеча и различные наручные модули позволяют адаптировать робот к индивидуальным особенностям каждого автоматизируемого процесса. Поскольку робот может полностью выгнуться назад, рабочий диапазон значительно расширяется и упрощается интеграция робота в производственные линии с плотной концентрацией оборудования. Робот также доступен с различными вариантами, такими как Foundry Plus, Foundry Prime (для литейного цеха) и Clean Room (для чистых помещений).
Особенности и преимущества:
Более высокая полезная нагрузка
Простое обслуживание
Увеличенная производительность пути
Пассивные функции безопасности
Размеры манипулятора представлены на рисунке 2 и 3.
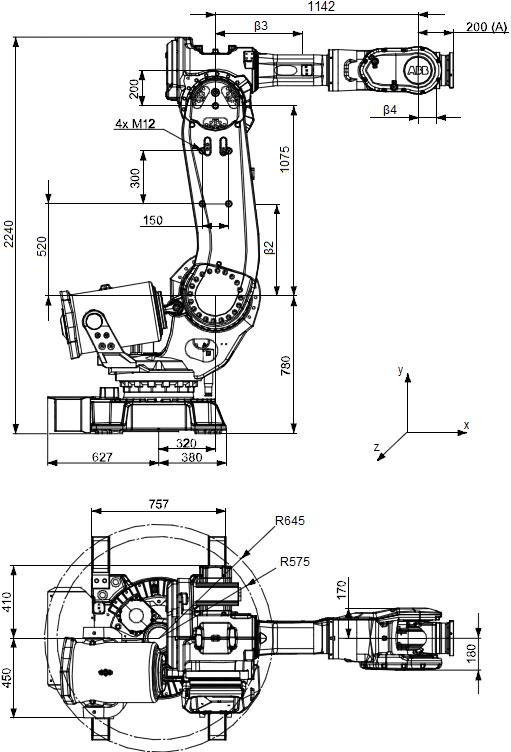
Рисунок 2 – Размеры манипулятора в миллиметрах, IRB 6640
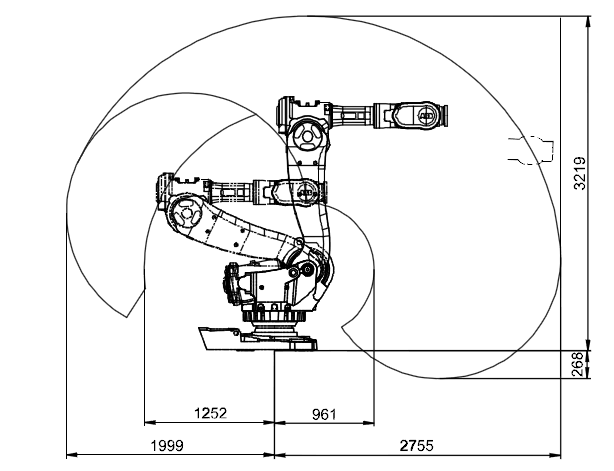
Рисунок 3 – Рабочая область манипулятора IRB 6640