

3.2 Вакуумный захват
Вакуумный захват (рисунок 3) содержит все компоненты, которые позволяют снимать, размещать и наклеивать этикетки размером 74 x 209 мм.
Вакуумный захват состоит из фланца робота, всасывающей пластины, пробковый цилиндр и печатающую головку. Всасывающая пластина соединена с фланцем робота тремя пружинными блоками. Исходное положение трех пружинных блоков проверяется индуктивными датчиками. Опто-датчик и вакуумный выключатель проверяют, находится ли этикетка на всасывающей пластине. Другой оптический датчик служит для защиты от столкновения, чтобы предотвратить столкновение захвата. После наклеивания этикетки, система выпрямляет её двумя выступами. При использовании соленоидного клапана можно всасывать дополнительный воздух, если вакуум вакуумного генератора слишком велик. Печатающая головка и контактный цилиндр также прикреплены к фланцу робота. Расстояние печати печатающей головки фиксируется цилиндром зонда. Робот движется в направлении компонента с вытащенным цилиндром, пока датчик цилиндра не сообщит о правильном положении. Затем включается цилиндр, и компонент может быть напечатан. Электрические компоненты подключаются к коробке привода / датчика.
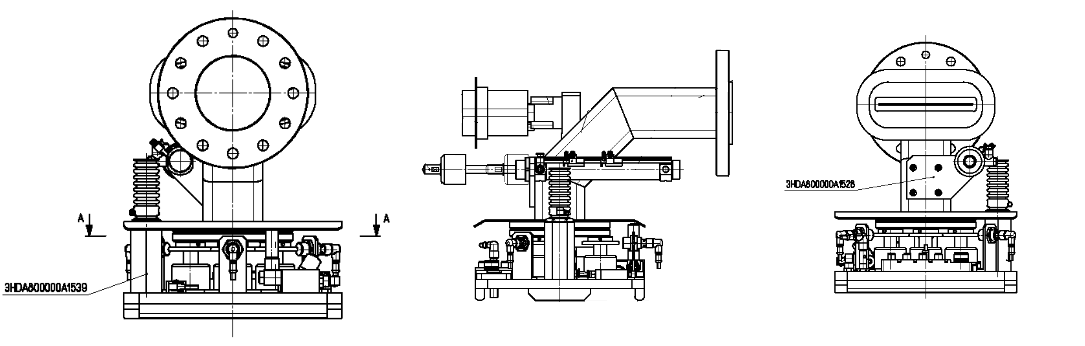
Рисунок 4 – Вакуумный захват
3.3 Маркировочная станция
Система PE101 (Рисунок 3) предназначена для автоматического нанесения самоклеящихся этикеток. Машина работает автоматически и активируется беспотенциальным пусковым сигналом. Через настраиваемые прикладные модули машина может применять 4 разных технологии маркировки: ударная головка, штамп давления, штамп давления с ударной головкой и качающийся штамп. Механизм печати может работать как в прямом термическом, так и в термическом переносе. Используя соответствующую цветную ленточную бумагу, можно распечатать метки PE и PP. Механизм печати сконфигурирован с помощью панели клавиш на лицевой стороне. Система маркировки управляется ПЛК (Siemens S7-224).
4 Технические и технологические требования, предъявляемые к мехатронной системе
Маркировщик должен определять и автоматически печатать, и наносить маркировочную наклейку и маркировочный номер на соответствующие места соответствующих рулонов на выходе АНГЦ, со скоростью 8 рулонов в час.
В маркировщике должны соблюдаться следующие международные стандарты: EN ISO 12100:2010 (Безопасность машин - Общие принципы проектирования - Оценка рисков
и снижение риска); EN ISO 13849-1:2015 (Безопасность оборудования, связанных с безопасностью частей систем управления -Часть 1: Общие принципы проектирования); EN ISO 13850:2015 (Безопасность машин - Аварийная остановка – Принципы проектирования); EN ISO 10218-1:2011 (Роботы для промышленной среды - Требования безопасности); ISO 9787:2013 (Роботы и робототехнические устройства - Системы координат и движения номенклатур); ISO 9283:1998 (Манипулирование промышленными роботами, критериями эффективности и методы испытаний); EN ISO 14644-1:2015i ( классификация чистоты воздуха); EN ISO 13732-1: 2008 (Эргономика тепловой среды. Часть 1).
5 Технические характеристики применяемого гидравлического, пневматического и электрооборудования
В данном роботе используется 2 электропривода с планетарными редукторами для управления 1-3 и 4-6 осями соответственно, основные характеристики которых представлены ниже:
Мотор с шестерней 3HAC025819-001:
номинальный момент: 19 Н*м;
номинальное напряжение: ~230В;
максимальный ток: 30 А;
мощность: 7 кВт;
количество фаз: 3;
передаточное отношение редуктора: 125.8;
момент инерции двигателя с ведомым коленом:
Платформа: Jy=5.27 кг*м2;
Колено: Jy=1.96 кг*м2, Jz=19.43 кг*м2;
Плечо: Jy=13.1 кг*м2, Jz=12.74 кг*м2;
максимальная скорость поворота:
Платформа: 100/с;
Колено: 90/с;
Плечо: 90/с;
максимальный угол поворота:
Платформа: +170 -170;
Колено: +85 -65;
Плечо: +70 -180;
точность: 0.0010.005;
масса: 32 кг ( 43.6 кг, с редуктором).
Мотор с шестерней 3HAC15889-2:
номинальный момент: 14 Н*м;
номинальное напряжение: ~230 В;
максимальный ток: 23 А;
мощность: 3809Вт;
количество фаз: 3;
передаточное отношение редуктора: 242,73;
момент инерции двигателя с ведомым коленом:
Кисть: Jy=0.32 кг*м2, Jy=0.36 кг*м2;
максимальная скорость поворота:
кисть: 190/с;
запястье (наклон): 140/с;
запястье (вращение): 190/с;
максимальная скорость поворота:
кисть: +300 -300;
запястье (наклон): +120 -120;
запястье (вращение): +360 -360;
точность: 0.0010.005;
масса: 27.48 кг ( 35.4 кг, с редуктором).
Центры масс колен манипулятора без двигателей и редукторов (рисунок 2):
2 = 535 мм
3 = 543 мм
4 = 87 мм