


ФУНДАМЕНТАЛЬНЫЕ ИПРИКЛАДНЫЕИССЛЕДОВАНИЯМОЛОДЫХУЧЕНЫХ
Сборник материаловIII Международной научно-практической конференции
УДК 625.768.1: 621.22: 62-25
ОБОСНОВАНИЕ КРИТЕРИЯ ЭФФЕКТИВНОСТИ РАБОЧЕГО ПРОЦЕССА КОММУНАЛЬНОЙ МАШИНЫ
С.И. Цехош, аспирантка кафедры «Автоматизация производственных процессов и электротехника»
Федеральное государственное бюджетное образовательное учреждение высшего
образования «Сибирский государственный автомобильно-дорожный университет |
|
СибАДИ |
|
|
(СибАДИ)», Омск, Россия |
Аннотац я. татья посвящена актуальной проблеме увеличения эксплуатационного ресурса |
|
щеточного рабочего органа |
повышения качества уборки. Представлена классификация |
коммунальных маш н (КМ) |
оп сан их принцип работы. В статье рассмотрены факторы, |
влияющие на качество уборки дорожного покрытия и ресурс щёточного ворса, на основании чего описана целевая функц я. Разработана блок-схема сложной динамической системы рабочего процесса КМ, для определен я связей между подсистемами, участвующими в рабочем процессе.
Ключевые слова: подметально-у орочная машина, коммунальная машина, щёточный рабочий орган, критер й эффект вности.
JUSTIFICATION OF THE EFFICIENCY CRITERION OF THE WORKFLOW
OF A COMMUNAL MACHINE
S.I. Tsekhosh, graduate student of the department
«Automation of production processes and electrical engineering»
Federal State Budget Educational Institution of Higher Education «The Siberian State Automobile and Highway University», Omsk, Russia
Abstract. The article is devoted to the actual problem of increasing the service life of the brush working body and improving the quality of cleaning. A classification of utility machines (KM) is presented and their principle of operation is described. The article discusses the factors affecting the quality of the cleaning of the road surface and the resource of the brush pile, on the basis of which the objective function is described. A block diagram of a complex dynamic KM workflow system has been developed to determine the links between the subsystems involved in the workflow.
Keywords: sweeper, communal machine, brush working body, performance criterion.
Введение
В настоящее время парк КМ, используемых для осуществления порядка на дорогах, весьма большой.
Около 40 предприятий в России выпускают машины для коммунального хозяйства, которые выполняют требования дорожных эксплуатационных организаций [1]. Если проанализировать рынок производства КМ, мы можем увидеть возрастание конкуренции с каждым годом, что увеличивает выбор данных машин повышает их качество, а также появляется возможность выбора среди отечественных производителей.
На некоторых отечественных машиностроительных предприятиях при создании современной дорожной техники нередко используются западные технологии, отдельные агрегаты и комплектующие. Стоимость КМ на 15-30 % ниже стоимости зарубежных аналогов [1].
Основная часть
Большой рынок КМ (Рисунок 1) для дорожно-уборных работ позволил сформировать классификацию КМ.
68

Направление 1.Транспортноеистроительноемашиностроение
СибАДИприжатия ЩРО к очищаемой поверхности с учетом типа ворса материала, из которого он изготовлен [8].
Рисунок 1 – Коммунальные машины
По назначен ю маш ны подразделяются [2]:
– подметальные;
– подметально-уборочные;
– вакуумно-подметальные;
– вакуумно-уборочные;
– струйные уборочные.
Подметально-уборочные маш ны осуществляют удаление загрязнений с твердых и аэродромных
покрытий, уборка городск х терр торий, с ор и транспортировку смёта.
Подметальные маш ны косоустановленной цилиндрической щёткой осуществляют перемещение смёта в сторону от направлен я движения КМ без его подборки, поэтому данный тип щёточного рабочего органа (ЩРО) в основном используют для подметания загородных дорог, внутридворовых
территорий для уборки снега.
Подметально-уборочные маш ны – наи олее распространенный вид (КМ). Они оснащаются ЩРО различных конструкц й, позволяющих очищать от загрязнений различные дорожные покрытия, и
работают совместно с мусоровозами или мусорос орниками.
Недостатками так х КМ являются высокая запыленность воздуха при работе ЩРО и быстрый износ ворса. В частности, затраты на замену изношенного щёточного ворса составляют до 25 %
общих затрат на эксплуатацию КМ [3].
Во время проведения дорожно-у орочных ра от движение КМ по опорной поверхности происходит под воздействием многочисленных внешних факторов, влияющих на рабочий процесс, например, неровности рельефа, степень загрязнения поверхности [4,5]. Неровность дорожного полотна является основным источником неуправляемых колебаний машины, амплитуды и ускорения которых могут достигать значительных величин. Приведенные выше факторы вызывают негативное влияние
на рабочий процесс КМ, что может значительно увеличить экономические потери.
Анализ предыдущих исследований показал, что эффективность рабочего процесса подметальноуборочных машин в значительной степени зависит от таких факторов как состояние ворса щёточного рабочего органа (ЩРО) и величины силы прижатия ЩРО к очищаемой поверхности [6,7]. В первом приближении может показаться, что повысить эффективность уборочного процесса можно за счет увеличения силы прижатия. Однако этот способ позволит добиться лишь временного повышения эффективности КМ вследствие того, что избыточное увеличение силы прижатия приведет к повышенному износу ворса ЩРО и, как следствие, в скором времени к неравномерной очистке
поверхности.
Для достижения максимального эффекта от уборки необходимо обеспечить оптимальную силу
Эту задачу, возможно, выполнить при помощи системы автоматического управления, которая позволит перемещать ЩРО с учетом вертикальной координаты дорожного полотна. спользование автоматического управления положением ЩРО обеспечит большую производительность рабочего процесса КМ и повысит ресурс ворса ЩРО. Кроме того, использование этой системы позволит устранить опорные элементы ЩРО.
На основании вышеприведенного обзора были сделаны следующие выводы:
1) Целевой функцией, отражающей эффективность рабочего процесса КМ, может служить
F(Qш,Qпод) Fопт, |
(1) |
где F – сила прижатия, Н; Fопт – оптимальное значение силы прижатия, Н; Qпод – подача подпитывающего насоса, м3/с; Qш – подача штатного насоса, м3/с.
2) Задача повышения качества работ, выполняемых КМ со ЩРО, связана с определением оптимальных значений параметров гидронасосов, обеспечивающих требуемое значение целевой функции.
69
ФУНДАМЕНТАЛЬНЫЕ ИПРИКЛАДНЫЕИССЛЕДОВАНИЯМОЛОДЫХУЧЕНЫХ
Сборник материаловIII Международной научно-практической конференции
Для определения этих оптимальных значений нужно разработать математическую модель рабочего процесса КМ, которая позволит провести необходимые исследования.
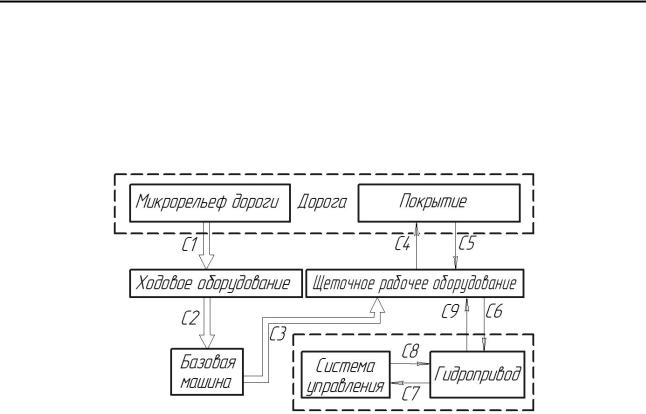
Для определения связей между подсистемами, участвующими в рабочем процессе КМ, была разработана блок-схема рабочего процесса [9].
На рисунке 1 представлена блок-схема сложной динамической системы рабочего процесса КМ. Данная блок-схема включает в себя два основных блока: базовая машина и дорожное плотно.
Базовая машина представлена подсистемами: рама, ходовое оборудование, ЩРО, гидропривод и система управления [10].
Дорожное полотно представлено подсистемами: реакции покрытия на ЩРО и микрорельефа на ходовое оборудование [11].
СибАДИРисунок 2 - Блок-схема сложной динамической системы рабочего процесса КМ
Микрорельеф воздействует на ходовое о орудование, в частности на левые и правые колёса (С1), вызывая их вертикальные перемещения. Подсистема ходового оборудования, воспринимает возмущающее воздействие со стороны микрорельефа, в свою очередь, воздействует на раму машины (С2), изменяя ее положение в пространстве. Далее воздействие передается на ЩРО (С3). ЩРО изменяет свое положение в пространстве – изменяется сила прижатия (С4) ЩРО к дорожному покрытию. Дорожное покрытие (С5), в зависимости от вида покрытия и параметров ЩРО, влияет на деформацию и износ ворса, что в свою очередь изменяет давление в одной из линий гидропривода (С6).
Система управления при помощи датчиков определяет изменение давления (С7) в гидролинии, сравнивает его значение с требуемым, которое соответствует оптимальной силе прижатия, и формирует управляющее воздействие (С8) на электрогидрораспределитель. Штатный гидроцилиндр подъема-опускания изменяет вертикальную координату ЩРО (С9), обеспечивая тем самым оптимальную силу прижатия ворса (С4).
Заключение
Представленная блок-схема рабочего процесса КМ, оборудованной ЩРО, является основой математической модели рабочего процесса КМ в программном продукте Matlab, которая использована в научных исследованиях.
Библиографический список
1. Баловнев В.И. Эксплуатация специальных автомобилей для содержания и ремонта, городских дорог / В.И. Баловнев, Г.Л. Карабан, И.А. Засов и др. – 2-е изд., перераб. и доп. – М.: Транспорт, 1992. – 263 с.
2. Баловнев В. . Эксплуатация специальных автомобилей для содержания и ремонта городских дорог / В.И. Баловнев, Г.Л. Карабан, И.А. Засов и др. – 2-е изд., перераб. и доп. – М.: Транспорт, 1992. – 263 с.
3. Баловнев В.И. Базовые автомобили и тягачи для строительных, дорожных и коммунальных машин / В.И. Баловнев, Р.Г. Данилов. – М.: МАДИ, 2000. – 69 с.
4.Лепеш А.Г. Научные основы повышения производительности подметальных агрегатов коммунальных машин / А.Г. Лепеш // Инновации. – 2011. – № 6. – С. 136-139.
5.Лепеш А.Г. Математическое моделирование силового взаимодействия щеток коммунальных машин с дорожным покрытием / А.Г. Лепеш, Г.В. Лепеш // Технико-технологические проблемы сервиса. – 2010. – №3(13).–
С. 32-38.
6. Лепеш А.Г. К определению силового взаимодействия щёток коммунальных машин с дорожным покрытием / А.Г. Лепеш // Технико-технологические проблемы сервиса. – 2011. – №1(15). – С. 30-35.
70
Направление 1.Транспортноеистроительноемашиностроение
7.Лепеш А.Г. Функционирование и ресурс щеток коммунальной уборочной техники / А.Г. Лепеш // Вестник Российской академии естественных наук. – 2011. – вып. 15 № 4. – С. 128-130.
8.Лепеш А.Г. Прогнозирование изнашивания щеток коммунальных машин / А.Г. Лепеш // Техникотехнологические проблемы сервиса. – 2010. – № 2(12). – С. 25-34.
9. Щербаков В.С. Система автоматизации эскизного проектирования автогрейдера: Монография / В. . Щербаков, Н.В. Беляев, В.В. Беляев. – Омск.: СибАДИ, 2009. – 133 с.
10.Щербаков В.С. Автоматизация проектирования планировочных машин на базе колесных тракторов: монография / В. . Щербаков, Н.В. Беляев, П.Ю. Скуба. – Омск.: СибАДИ, 2013. – 125 с.
11.Игнатов .Д. Блок-схема рабочего процесса дорожной фрезы / С.Д. Игнатов, Н.С. Шерстнев // Вестник ибирской государственной автомобильно-дорожнойакадемии. – 2017. – № 3(55). – С. 120-124.
СибАДИНаучный руководитель – Игнатов С.Д., кандидат технических наук, доцент кафедры «Техника для строительства и сервиса нефтегазовых комплексов и инфраструктур», ФГБОУ ВО « рск й государственный автомобильно-дорожный университет (СибАДИ)»
71
НаправленСибАДИе 2. ПРОБЛЕМЫ И ПЕРСПЕКТИВЫ
РАЗВИТИЯ ТРАНСПОРТНОГО КОМПЛЕКСА
Секция 2.1. НОВЫЕ ТЕХНОЛОГИИ, УСТРОЙСТВА И МАТЕРИАЛЫ ПРИ ПРОИЗВОДСТВЕ
И ЭКСПЛУАТАЦИИ АВТОТР НСПОРТНЫХ СРЕДСТВ В СЛОЖНЫХ КЛИМ ТИЧЕСК Х УСЛОВИЯХ
72