

На схеме обозначено: -l – длина стрелы;
-β – угол наклона стрелы, отсчитываемый от горизонтальной плоскости;
γ – угол азимута – угол поворота платформы относительно ходовой рамы крана в горизонтальной плоскости;
С-R – вылет;
-ДДП – датчик давления в поршневой полости гидроцилиндра подъёма стрелы;
-ДДШ – датч к давления в штоковой полости гидроцилиндра
раничподъёма стрелы;
-ДУГ – датч к угла наклона стрелы; -ДД – датч к дл ны стрелы; -ДА – датч к аз мута.
Огран бч тель о еспечивает контроль состояния крана в процессе работы, нформ рует машиниста о наиболее важных параметрах. Ог-
тель служ т для защиты крана от перегрузки и опрокидывания, а также выполняет функции координатной защиты, обеспечивая контроль положен я о орудования крана в пространстве с целью его защиты от столкновений с препятствиями и ЛЭП, и указателя грузо-
подъёмности.
2. Основные технические характеристики АСУ ОГП 31А |
|
|
Д |
Число одновременноАиндицируемых параметров 3. Общее число |
|
индицируемых параметров в рабочих режимах 6. Погрешность пре- |
|
образований не более 1% ±2 единицы счета. |
|
Погрешность вычислений: |
И |
-при формировании сигнала «ПЕРЕГРУЗКА» и «ЗВУКОВОЙ СИГНАЛ» – не более 3%;
-при формировании сигнала «ПОВОРОТ» и вводе ограничений по углам поворота платформы «ЛЕВЫЙ УГОЛ» и «ПРАВЫЙ УГОЛ»
– не более ±3о относительно установленных углов ограничения; -при формировании сигнала «ПОВОРОТ» и вводе ограничений
типа «СТЕНА» и «ПОТОЛОК» – не более ±0,5 м.
Сигналы «ПЕРЕГРУЗКА» и «ЗВУКОВОЙ СИГНАЛ» формируются при увеличении величины фактической загрузки (параметр «ЗАГРУЗКА ФАКТ») и достижении ею значения, равного 103-105%. Отключение сигналов осуществляется при уменьшении величины фактической загрузки и достижении ею значения, равного 100102%.
В приборе обеспечивается предупреждающая звуковая сигнали-
37
зация машиниста автокрана (сигнал «ЗУММЕР»). Формирование сигнала «ЗУММЕР» осуществляется при увеличении величины фактической загрузки на индикаторе «ЗАГРУЗКА ФАКТ» прибора и достижении ею значений, равных 93-95%, а также за 4-6° перед введенным ограничением по углу поворота и за 0,2-0,4 м перед введенными ограничениями по вылету (ограничение «СТЕНА») и высоте подъёма стрелы (ограничение «ПОТОЛОК»). Отключение сигнала «ЗУММЕР» осуществляется при уменьшении величины фактической загрузки на индикаторе «ЗАГРУЗКА ФАКТ» прибора и достижении ею значений,
равных 88-90%.
Напряжен е п тан я от 21,6 до 30,2 В. Ток потребления не более
2,5 А. |
авар йном состоянии бортовой сети с напряжением менее |
С |
|
14 В |
более 41 В пр ор автоматически отключается от сети. |
При |
|
3. |
б |
остав огран ч теля грузоподъёмности АСУ ОГП 31А |
|
Общая электр ческая схема ограничителя грузоподъёмности |
|
представлена на р с. 14. |
|
|
А |
|
Д |
|
И |
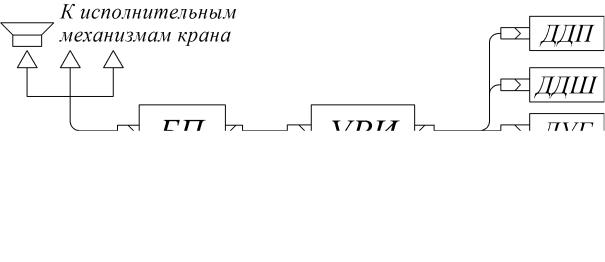
Рис. 14. Схема электрическая общая ограничителя грузоподъёмности АСУ ОГП 31А
В состав ограничителя входят: -блок питания;
-устройство решающее индикаторное; -датчик давления в поршневой полости гидроцилиндра подъёма
стрелы; -датчик давления в штоковой полости гидроцилиндра подъёма
стрелы;
38
-датчик угла наклона стрелы; -датчик длины стрелы; -датчик азимута; -комплект кабелей.
4. остав, назначение и принцип работы составных частей ограничителя грузоподъёмности АСУ ОГП 31А
Блок п тан я БП состоит из пяти стабилизаторов напряжения [+5 В (два стаб л затора); +4,5 В; +15 В; –15 В] для питания датчиков
и блока УРИ схемы защиты, расположенных на четырех платах. БП |
|
имеет устройство |
контроля и защиты от перегрузки. Питание БП |
С |
|
осуществляется постоянным напряжением от 20 до 30 В. В состав БП |
|
входят также три |
сполнительных реле: по перегрузке и неисправно- |
стиУстройство решающее индикаторное УРИ представляет собой микропроцессорное устройство, устанавливаемое в стойке для прибо-
, включен ю внешнего звукового сигнала, координатной защите.
БП имеет два разъёма, предохранитель, тумблер включения питания.
ров в каб не маш н ста. УРИ, о рабатывая информацию с датчиков, |
||
обеспечивает ото ражение нео ходимой информации на цифровом |
||
б |
|
|
табло и управление исполнительными реле, находящимися в БП. |
||
Внутри УРИ размещены три платы: |
|
|
-плата процессора; |
ИНДИК |
|
-плата синхронизатора; |
||
-плата индикацииА. |
||
На передней панели УРИ расположены: |
|
|
-цифровые индикаторы «З |
ГРУЗКА ФАКТ- Л НА СТРЕЛЫ», |
|
«ЗАГРУЗКА МАКС-ВЫСОТА», «ВЫЛЕТ-УГОЛ СТРЕЛЫ»; |
||
-кнопка смены индикации « |
»; |
И |
|
||
-переключатель режимов работы «РЕЖИМ-КОНТРОЛЬ»; -светодиодные индикаторы «ЛЕВЫЙ УГОЛ», «ПРАВЫЙ
УГОЛ», «СТЕНА», «ПОТОЛОК», «ПЕРЕГРУЗКА», «НЕ СПРАВНОСТЬ»;
-потенциометры ввода режимов «ЛЕВЫЙ УГОЛ», «ПРАВЫЙ УГОЛ»;
-кнопки ввода режимов «СТЕНА», «ПОТОЛОК»; -планка для пломбирования калибровочных резисторов.
Плата процессора содержит сам процессор, устройство дешифрации адреса, регистры адреса, оперативное запоминающее устройство (ОЗУ) и программируемое постоянное запоминающее устройство (ПЗУ). Тактирование процессора осуществляется импульсами часто-
39
той 5 МГц, поступающими с платы синхронизатора. Процессор управляет работой ограничителя в соответствии с выбранным режимом работы и программой, заложенной в ПЗУ. На плате процессора расположены также логические схемы начальной установки и схема для управления чтением данных из ПЗУ.
Плата синхронизатора содержит генератор с резонатором на частоту 10 МГц, передающий сигнал на пересчетную схему, которая образует:
-с гнал тактовой частоты процессора 5 МГц; -частотный с гнал для обеспечения работы аналого-цифрового
преобразователя (АЦП); |
|
|
|
-с гнал прерыван я для процессора. |
|
||
С |
|
|
|
Плата с нхрон затора формирует сигналы выборки ОЗУ и |
|||
управляет: |
|
|
|
- |
каторами «ПЕРЕГРУЗКА», |
«НЕИСПРАВНОСТЬ», |
«ЛЕ- |
ВЫЙ УГОЛ», «ПРАВЫЙ УГОЛ», «СТЕНА», «ПОТОЛОК», «ВЫ- |
|||
ЛЕТ», «ЗАГРУЗКАФАКТ», «З ГРУЗКА М КС»; |
|
||
инд |
|
|
|
-опросом датч ков; |
|
|
|
-исполн тельными реле, размещенными в БП. |
|
||
Плата индикации включает в |
три трехразрядных цифровых |
||
индикаторасебяс памятью, предназначенной для хранения информации |
|||
до следующей перезаписи, что о еспечивает практически постоянное |
|||
(без мигания) свечение индикаторов. Переключение выводимой ин- |
|||
формации обеспечивается кнопкой смены индикации « |
» на |
||
передней панели УРИА. |
|
||
Переключателем «РЕЖИМ-КОНТРОЛЬ» осуществляется выбор |
|||
одного из режимов работы: |
|
|
|
-рабочие режимы крана «1» (основной режим на выносных опорах), «2» (с вдвинутыми опорами), «3» (с навесным гуськом). В режиме «2» в настоящее время работа крана запрещена действующими Правилами. Режим «3» применяется редко.
-режим «КОНТРОЛЬ» для самопроверки прибора; |
|
-режимы «ЮСТ1», «ЮСТ2», «ЮСТ3» для настройки и проверки |
|
датчиков; |
ИНДИК |
|
И |
Режим «КОНТРОЛЬ» предназначен для самоконтроля прибора. В этом режиме обеспечивается поочередная проверка цифровых индикаторов. После прохождения цикла знакоиндикации от 0 до 9 на цифровые индикаторы УРИ кратковременно выводится служебная информация:
-контрольная сумма рабочей программы; -дата разработки программы;
40
-тип крана, для которого была первоначально разработана данная версия программы.
Одновременно в режиме «КОНТРОЛЬ» происходит тестирование, которым проверяется работоспособность наиболее важных узлов. В случае обнаружения неисправности при тестировании на индикаторе «ВЫЛЕТ» высвечивается цифровой код соответствующей неисправности и загорается светодиод «НЕИСПРАВНОСТЬ». Перечень некоторых возможных неисправностей и их кодов приведен в табл. 8.
|
|
|
|
|
|
|
|
Таблица 8 |
|
|
Признак |
|
|
|
|
|
|
|
|
|
инд |
|
|
|
|
|
|
||
|
неисправности |
Реж м |
|
|
|
|
|
|
|
Сна каторе ра оты |
Возможная неисправность |
|
Метод устранения |
|
|||||
|
вылета |
|
|
|
|
|
|
|
|
|
|
|
Лю ой з |
О рыв цепи датчика давле- |
Заменить датчик или |
|
|||
001 |
б |
|
|
|
|
||||
|
ра оч х |
|
ния поршневой |
|
отремонтировать жгут |
|
|||
|
|
|
реж мов |
полости гидроцилиндра |
|
|
|
||
002 |
|
То же |
О рыв цепи датчика длины |
|
То же |
|
|||
|
|
|
|
|
стрелы |
|
|
|
|
|
003 |
|
То же |
О рыв датчика угла наклона |
|
То же |
|
||
|
|
|
А |
|
|
|
|||
|
|
|
|
О рыв цепи датчика давле- |
|
|
|
||
005 |
|
То же |
ния штоковой полости |
|
То же |
|
|||
|
|
|
|
|
гидроцилиндра |
|
|
|
|
|
|
|
КОНТРОЛЬ |
Неисправность ЦП. Неис- |
|
Заменить плату |
|
||
013 |
|
Любой из |
|
синхронизатора. |
|
||||
002 |
|
рабочих ре- |
|
Д |
|
||||
|
правность стабилизаторов |
|
Заменить или |
|
|||||
|
|
|
жимов |
|
±15 В |
|
|
отремонтировать БП |
|
|
008 |
|
|
|
|
|
|
|
|
009 |
|
КОНТРОЛЬ |
|
Неисправность |
|
|
Заменить плату |
|
|
011 |
|
|
|
|
|
||||
|
|
процессора |
|
|
процессора |
|
|||
012 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
024 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Установить переклю- |
|
|
|
|
|
|
Неправильная установка пе- |
|
чатель |
|
||
|
|
|
|
|
«КОНТРОЛЬ- |
|
|||
|
|
|
|
|
реключателя |
|
|
|
|
|
|
|
|
|
|
|
РЕЖ М» |
|
|
|
|
|
Любой из |
«КОНТРОЛЬ-РЕЖИМ». |
|
|
|||
|
|
|
в рабочее положение. |
|
|||||
007 |
|
рабочих |
Неисправность переключа- |
|
|||||
|
|
|
режимов |
|
теля. |
ИОтремонтировать или |
|
||
|
|
|
|
Неисправность платы инди- |
заменить переключа- |
|
|||
|
|
|
|
|
кации |
|
|
тель. |
|
|
|
|
|
|
|
|
Заменить плату |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
индикации |
|
Режимы «ЮСТ1», «ЮСТ2» и «ЮСТ3» используются для настройки и проверки прибора. Информация, выводимая на цифровые индикаторы в юстировочных режимах, приведена в табл. 9.
41
|
|
|
|
|
|
|
|
|
Таблица 9 |
|
|
Положение |
|
Положение |
|
Информация, выводимая на индикаторе |
|
||||
|
переключателя |
ЗАГРУЗКА |
|
ЗАГРУЗКА |
|
|
||||
|
«КОНТРОЛЬ - |
кнопки |
|
ВЫЛЕТ |
|
|||||
|
«ИНДИК» |
ФАКТ |
|
МАКС |
|
|||||
|
РЕЖИМ» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Удлинение |
Давление в поршне- |
|
|
|
|
|
|
Угол наклона |
стрелы без ин- |
|
||||
|
|
|
Отжатое |
стрелы |
дикации десят- |
вой полости гидро- |
|
|||
|
Ю Т.1 |
|
|
|
|
|
ков метров |
цилиндра |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Давление в |
|
|
|
|
Нажатое |
|
- |
|
|
- |
штоковой полости |
|
|
и |
|
|
|
|
|
гидроцилиндра |
|
||
С |
|
|
|
|
|
|
||||
|
|
|
Коэффициент |
Коэффициент |
Коэффициент 8.00, |
|
||||
|
|
|
|
250, |
|
|||||
|
|
|
Отжатое |
95.0, устанав- |
устанавливаемый |
|
||||
|
|
|
устанавливаемый |
|
||||||
|
Ю Т.2 |
|
|
ливаемый ▼ 1 |
▼ 2 |
|
||||
|
|
|
|
▼ 3 |
|
|
|
|
|
|
|
|
|
Нажатое |
|
- |
|
|
- |
Коэффициент 62,0 |
|
|
|
|
|
|
|
66,0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отжатое |
Ограничение |
Угол поворота |
Ограничение |
|
|||
|
|
|
А |
правого угла |
|
|||||
|
|
|
|
левого угла |
|
платформы |
|
|||
|
|
|
б |
|
|
|
|
|||
|
ЮСТ.3 |
|
|
|
|
|
Результирующее |
|
||
|
|
|
Нажатое |
|
- |
|
|
- |
давление в штоковой |
|
|
|
|
|
|
|
и поршневой полос- |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тях гидроцилиндра |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Д |
|
||||
|
В рабочих режимах ограничитель, обрабатывая информацию дат- |
|||||||||
|
чиков, обеспечивает: |
|
|
|
|
И |
||||
|
-измерение и индикацию длины стрелы; |
|||||||||
|
-измерение и индикацию угла наклона стрелы; |
|
|
|||||||
-расчет и индикацию вылета; -расчет и индикацию допустимой загрузки;
-расчет и индикацию фактической загрузки; -расчет и индикацию высоты оголовка стрелы;
-формирование при определенных условиях сигналов «ПЕРЕГРУЗКА», «НЕИСПРАВНОСТЬ» и звукового сигнала;
-выдачу информации о возможных неисправностях составных частей аппаратуры с указанием кода (номера) неисправности составной части (см. табл. 8).
Информация выводится на цифровые индикаторы лицевой панели УРИ. На лицевой панели УРИ находятся также элементы ввода и контроля координатной защиты, используемой при работе крана в
42
стесненных условиях: кнопки ограничений типа «ПОТОЛОК» и «СТЕНА», а также потенциометры для установки ограничения по углу поворота платформы «ЛЕВЫЙ УГОЛ», «ПРАВЫЙ УГОЛ» и четыре светодиодных индикатора для индикации ввода указанных режимов.
Введение ограничений по углу поворота производится потенциометрами «ЛЕВЫЙ УГОЛ», «ПРАВЫЙ УГОЛ», при этом в режиме «Ю Т3» на индикаторе «ЗАГРУЗКА ФАКТ» выдается информация об огран чен левого угла, а на индикаторе «ВЫЛЕТ» об ограничении правого угла поворота платформы. При отсутствии ограничений по углам огран ч тель запрещает работу крана в рабочих режимах,
когда стрела наход |
тся в зоне ±60° относительно транспортного по- |
С |
ной водителя). Для введения ограничений типа |
ложен я (над ка |
|
« ТЕНА» ли «ПОТОЛОК» следует установить по условиям работы |
|
максимальную дл ну стрелы и максимальный вылет и нажать кнопки «СТЕНА» ли «ПОТОЛОК» соответственно.
введен |
координатной защиты загораются соответствую- |
При |
|
щие светод оды «ЛЕВЫЙ УГОЛ», «ПР ВЫЙ УГОЛ», «СТЕНА», |
|
«ПОТОЛОК», которые светятся постоянно. В случае выхода стрелы |
|
из заданной |
зоны происходит автоматическое отключение |
приводов кранарабочей, при этом мигает тот индикатор координатной защи- |
|
ты, для которого |
ыли нарушены условия ограничения. Для снятия |
ограничений следует повторно нажать кнопки «СТЕНА», «ПОТО- |
|
ЛОК» или установить потенциометры «ЛЕВЫЙ УГОЛ», «ПРАВЫЙ |
|
УГОЛ» в исходное положениеА. |
|
Если ограничения по углам не установлены и мигают светодиоды |
|
«ЛЕВЫЙ УГОЛ» или «ПР ВЫЙ УГОЛ», то это значит, что стрела |
|
находится в зоне ±60° относительноДтранспортного положения. На передней панели расположены резисторы калибровки датчиков давления ▼1, ▼2, ▼3, используемые при настройке ограничителя. Резисторы закрыты планкой, в которой предусмотрены места для пломби-
рования.
Выдвижение телескопа ограничителем Иразрешается, если масса груза на крюке не превышает 2-4 т в зависимости от длины стрелы и вылета. При большей массе груза выдвижение телескопа блокируется.
При длине стрелы 11,7 м телескоп фиксируется пальцем. При этом на вылете до 4,5 м ограничитель увеличивает грузоподъёмность крана.
Датчики давления в поршневой (ДДП) и штоковой (ДДШ) полостях гидроцилиндра подъёма стрелы это малогабаритные потен-
циометрические датчики типа МД-250Т. Принцип действия датчика
43
заключается в преобразовании контролируемого давления в деформацию упругой мембраны. Эта деформация приводит к перемещению движка потенциометра и к изменению его выходного сопротивления.
Датчик длины стрелы (ДД) предназначен для измерения длины стрелы. Датчик выполнен на базе многооборотного потенциометра типа П5-44-01-1 кОм, который размещается на стреловом барабане.
СПри выдвижении или втягивании телескопической стрелы вращение барабана через поводок передается на ось неподвижно установленного потенц ометра.
Датч к угла наклона стрелы (ДУГ) предназначен для измерения углаДатчикнаклона стрелы. выполнен на базе потенциометра типа ПТП сопрот влен ем 1 кОм. Ось потенциометра механически соединена с валом датч ка. На кране датчик устанавливается соосно со стрелой соед нен с ней поводком.
Датч кбаз мута (ДА) предназначен для измерения угла поворота платформы относ тельно ходовой рамы крана. Датчик выполнен на базе потенц ометра т па ПТП сопротивлением 1 кОм. Корпус датчика креп тся неподв жно относительно ходовой рамы крана. Ось потенциометра механ чески соединена с одной из шестерен датчика. Вторая шестерня, имеющаяАзацепление с первой, закреплена неподвижно относительно платформы крана и поворачивается вместе с ней.
АЦП.
5. Принцип ра оты ограничителя грузоподъёмностиДСУ ОГП 31А
Работа ограничителя построена следующим образом (рис. 15). Генератор 1 с резонатором передает сигнал на пересчетную схему 2, которая образует сигнал тактовой частоты процессора, сигнал прерывания для процессора и частотный сигнал Идля обеспечения работы
Сигналы датчиков давления 3 и 4, установленных соответственно в поршневой и штоковой полостях гидроцилиндра, длины стрелы 5, угла наклона стрелы 6 поступают на вход коммутатора 8-1. Сигналы других контролируемых устройств: датчика азимута (поворота платформы) 9 и задатчика предельных углов поворота платформы 10 поступают на вход дополнительного коммутатора 8-2, выход которого подключен к коммутатору 8-1; этим достигается расширение возможностей коммутации сигналов.
Для контроля уровня сигналов датчиков, в том числе для контроля обрыва их цепей, на коммутатор подается установленное напряжение узла подстройки 11. Узел подстройки предназначен для приведе-
44
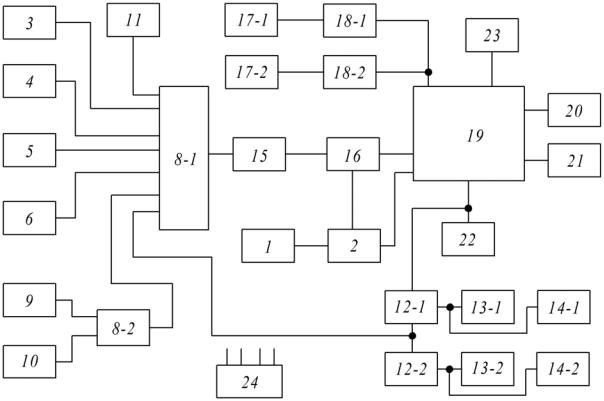
ния в соответствие сигналов датчиков их нормированным значениям при граничных значениях измеряемых параметров. Коммутаторы 8-1 и 8-2 осуществляют последовательный опрос датчиков (3...6 и 9), задатчика 10 и узла подстройки 11.
Си б
РисА. 15. Блок-схемаДограничителя
Управление коммутатором и, следовательно, выбором опрашиваемого датчика осуществляет регистр команд 12-1, он также управляет включением единичных индикаторов 13-1 («ПЕРЕГРУЗКА», «НЕИСПРАВНОСТЬ») и включением двух выходныхИреле 14-1, коммутирующих сигналы «ПЕРЕГРУЗКА» и «ЗВУКОВОЙ С ГНАЛ». Каждый из входов коммутатора выбирается по коду процессора.
Одно из выходных исполнительных реле 14-1 реле защиты от перегрузки в обесточенном состоянии обеспечивает защитное отключение механизмов крана. Другое реле используется для включения кранового звукового сигнала. Регистр 12-2 управляет включением единичных индикаторов 13-2 координатной защиты («ЛЕВЫЙ УГОЛ», «ПРАВЫЙ УГОЛ», «СТЕНА», «ПОТОЛОК») и включением выходного реле 14-2 координатной защиты, коммутирующего сигнал «ПОВОРОТ». Реле 14-2 обесточивается при достижении ограничений в режиме координатной защиты. С выхода коммутатора 81 сигналы поступают на нормирующий усилитель 15 и далее на вход десятираз-
45
рядного АЦП 16. АЦП преобразует выходной аналоговый сигнал коммутатора в цифровой (двоичный) код. Запуск АЦП и его тактирование осуществляются по сигналам пересчетной схемы 2. Органы управления работой аппаратуры, расположенные на лицевой панели блока УРИ, предназначены для включения аппаратуры, задания требуемого режима работы крана, ввода ограничений координатной защиты и изменения отображаемых на индикаторах параметров. Эти органы представлены блоками дискретных управляющих устройств.
Блок 17-1: переключатель режима работы, кнопки разовых команд, концевые выключатели передают свои сигналы на магистральный пр емопередатч к 18-1, работающий в данном устройстве только
на прием нформац |
. Блок 17-2 предназначен для обеспечения воз- |
|
С |
|
информацией: ограничение |
можности управлен я дополнительной |
||
«ЛЕВЫЙ УГОЛ», |
«ПРАВЫЙ УГОЛ», |
«СТЕНА», «ПОТОЛОК» и |
включает в себя второй приемопередатчик 18-2. Блоки 17-1 и 17-2 предназначены для передачи в процессор по его запросу информации
от |
входов, позволяющей изменить режим функциониро- |
|
дискретных |
|
|
вания процессора, про зводить |
из ПЗУ требуемой грузовой |
|
характер ст ки |
зменять состав отображаемых на индикаторах па- |
|
раметров. |
|
|
Процессорвыборку19 предназначен для реализации алгоритмов подго- |
||
товки и приема исходных данных от датчиков, управления обменом |
||
информации, обра отки цифровой информации в соответствии с за- |
||
ложенной программой вычислений, выполнения математических рас- |
||
четов, преобразованияАи выдачи данных на индикацию, а также для |
||
выработки сигналов управления сопряженной аппаратурой: АЦП, |
||
ОЗУ (20), ПЗУ (21) и самопроверки системы. |
||
Работа вычислителя определяетсяДалгоритмом функционирования, хранящимся в виде кодов в ПЗУ. В ПЗУИзанесены также исходные данные и константы, необходимые для расчета грузовых характеристик крана и параметров, отображаемых на индикаторах. Блок 22 цифровой индикации предназначен для приема, хранения, преобразования кодов, передаваемых вычислителем, в семисегментный код и отображения информации на знакосинтезирующих индикаторах. Узел 23 предназначен для начальной установки аппаратуры в исходное состояние. Усилительные элементы аппаратуры и логические схемы обработки отдельных сигналов на структурной схеме опущены. сточник вторичного питания 24 преобразует подаваемое на аппаратуру нестабильное напряжение бортсети крана в стабилизированные гальванически развязанные напряжения: +5 В; +4,5 В; +15 В; -15В.
46