

итоговый отчет
.pdfРисунок 4.2 − Незавершенные полосы скольжения в монокристаллическом образце LiF, зародившиеся от поверхностных источников типа концентраторов напряжения (а) и соответствующие электрические сигналы (б). Полосы 1 и 3 содержат избыток дислокаций одного механического заряда, а полосы 2 и 4 – избыток дислокаций противоположного механического знака, полоса 5 – симметричное дислокационное скопление; P - проекция дипольного момента образца на направление [001]; электрический заряд дислокации q < 0 .
81
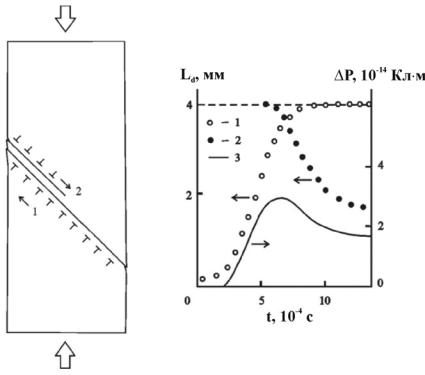
Рисунок 4.3 − «Эстафетная» передача сдвига вследствие образования поверхностной ступеньки при выходе полосы скольжения: 1 – первичная полоса, 2 – вторичная полоса, распространяющаяся антипараллельно первичной, 3 – электрический сигнал, генерируемый в ходе эволюции этих полос.
Действительно, полосы с избытком дислокаций одного механического знака (полосы 1 и
3) генерируют сигналы ЭМЭ одного знака (положительного при q<0), а полосы с
избытком дислокаций противоположного механического знака (2 и 4) – генерируют
отрицательные сигналы ЭМЭ. При прохождении полосы через все сечение образца на
поверхности образуется ступенька, которая является концентратором напряжения,
способным активировать поверхностный источник вторичной полосы скольжения,
распространяющуюся антипараллельно первичной (Рисунок 4.3). Такой «эстафетный»
механизм передачи скольжения на мезоскопическом структурном уровне способен
конкурировать с механизмом расширения полосы скольжения за счет двойного
поперечного скольжения.
Результаты синхронной записи сигналов электрической поляризации |
P(t) , |
вызванной развитием закритической трещины скола и фотоэлектронного сигнала,
пропорционального длине трещины Lс, представлены на рисунок 4.4. Из рисунков 4.1 и 4.4 видно, что значение дипольного момента образца пропорционально длине
односторонней полосы скольжения |
и длине трещины, соответственно. |
82

Рисунок 4.4 − Синхронная запись сигнала электрической поляризации P (1) образца LiF быстрой трещиной скола и сигнала ФЭУ(2), вызванного перекрыванием светового потока, пропорционального длине трещины Lc .
Рисунок 4.5 − Последовательное развитие трещины и линии скольжения, испускаемой вершиной остановившейся трещины и соответствующий этому процессу сигнал электрической поляризации P (t). 1 – трещина, 2 – полоса скольжения.
83
На рисунок 4.5. представлены результаты исследования кинетики докритической трещины, растущей в условиях несимметричного скола, фотоупругим и электрическим методами. Характерная особенность этой ситуации состоит в том, что вершина остановившейся трещины генерирует плоское скопление дислокаций в плоскости (110), а
сигнал ЭМЭ, возникающий в ходе такого процесса, представляет собой последовательность двух сигналов – сигнала, вызванного ростом трещины, и следующего за ним сигнала, обусловленного эволюцией линии скольжения. Обнаруженная взаимосвязь между сигналами ЭМЭ и кинетикой отдельных полос скольжения и трещин позволяет идентифицировать эти дефекты в более сложных процессах, например,
множественном скольжении и микрорастрескивании.
Электромагнитная эмиссия при множественном скольжении и
микрорастрескивании. Одноосное сжатие монокристаллических образцов LiF в «мягкой» испытательной машине с постоянной скоростью нагружения σ0 =5×10-2 MПа/с до появления первых макроскопических трещин в объеме образца (εmax ≈10% ) показало, что весь процесс пластического деформирования, начиная со стадии незавершенного скольжения, сопровождается генерированием более чем трех тысяч дискретных импульсов ЭМЭ (Рисунок 4.6). Эти импульсы имеют почти треугольные формы и характеризуются тремя основными параметрами: длительностью переднего фронта tfr,
амплитудой ϕm и временем спада τd. Зарегистрированные импульсы можно разделить на две характерные группы: импульсы I типа с tfr ≈3×10-4–10-3 с, ϕm ≈30-300 мкВ и импульсы
II типа с tfr ≈3×10-7–10-6 с и амплитудами от 30 мкВ до 3 мВ. Все импульсы имеют одинаковое время спада τd ≈ R0C0 ≈0.2 с, определяемое низкочастотными свойствами предусилителя, что значительно меньше максвелловского времени релаксации монокристаллов LiF τM~105 с. Первые импульсы I типа амплитудой 50-70 мкВ возникали при ε ≈ 0.3% , когда в образце появлялись первые линии скольжения, содержащие, по данным травления, 300-500 дислокаций. Генерирование серии дискретных импульсов I
типа сопровождало весь процесс пластической деформации. Импульсы II типа, в
основном, генерировались на более поздних стадиях деформирования (ε >6 %).
Наблюдения показывают, что некоторые импульсы II типа возникают одновременно с появлением видимых трещин в нагруженном образце. Форма фронта импульса I типа и их продолжительность соответствуют характерным сигналам ЭМЭ, вызванным распространением отдельных полос скольжения в монокристалле LiF. Поэтому можно
84

предположить, что импульсы I типа обусловлены динамикой дислокационных полос скольжения, а импульсы II типа – развитием микротрещин в деформируемом кристалле.
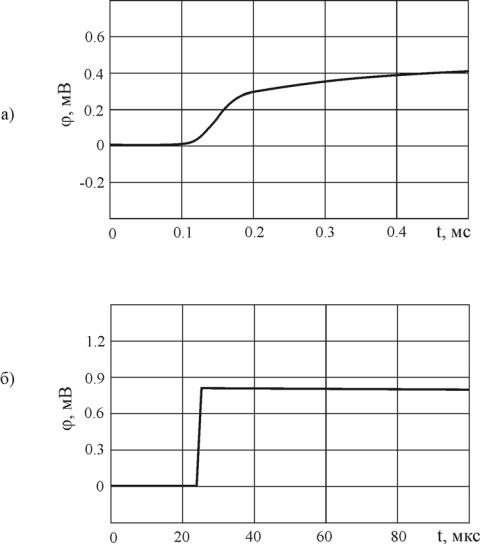
Этот вывод подтверждается специальной серией экспериментов, в которой синхронно с записью сигнала ЭМЭ записывали сигнал высокочувствительного датчика смещения, позволяющего фиксировать скачки деформации образца в полосе частот ~1– 100 Гц с чувствительностью до 10 нм. Установлено, что развитие полосы скольжения сопровождается скачком деформации h ~3×10-2–3×10-1 мкм и одновременно генерированием импульса ЭМЭ I типа (Рисунок 4.7а). В то же время развитие внутренней трещины размером >200 мкм вдоль направления сжатия на стадии развитой деформации
(ε > 6% ) вызывает генерирование характерного сигнала ЭМЭ II-типа, но не вызывает скачка деформации, так как в этом случае образец пластически не деформируется
(Рисунок 4.7б).
Рисунок 4.6 − Дискретная электромагнитная эмиссия при одноосном сжатии монокристалла LiF в «мягкой» машине со скоростью σ0 =5×10-2 МПа/с: 1 – кривая
пластической деформации ε(σ) образца, 2 – сигнал ЭМЭ.
85
Таким образом, измерение в реальном времени собственного электромагнитного
излучения пластически деформируемого ионного кристалла позволяет отображать
сложный процесс формирования трехмерной структуры электрически активных
мезоскопических дефектов (полос скольжения и трещин) на временной ряд – сигнал ЭМЭ
и идентифицировать in situ эти дефекты, исследовать их динамику с высоким временным
разрешением, считывать их количество в кристалле на различных стадиях
деформирования, оценивать количественно их роль в общей структурной картине
деформируемого кристалла, проводить динамический, статистический и корреляционный
анализ событий необратимой деформации, связанных с их эволюцией.
Рисунок 4.7 − Типичные импульсы электромагнитной эмиссии, сопровождающие пластическую деформацию монокристаллов LiF: а – фронт импульса ЭМЭ I типа, вызванного распространением полосы скольжения при ε=1.5%; б – фронт импульса ЭМЭ II типа, вызванного образованием микротрещины при ε=6%.
86
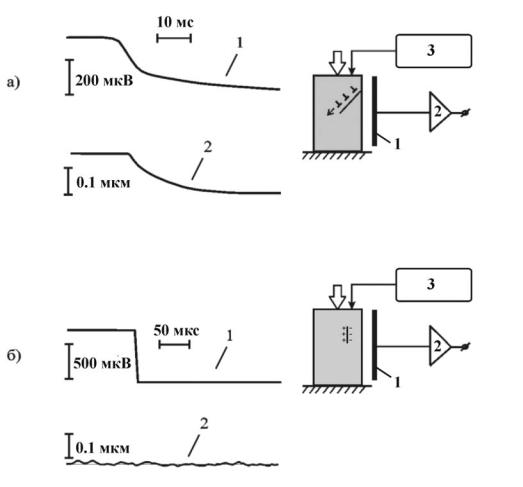
Рисунок 4.8 − Сравнение сигнала электромагнитной эмиссии (1) и сигнала датчика смещения (2) при распространении одиночной полосы скольжения на стадии незавершенного скольжения, ε=0.8% (а) и образовании видимой трещины размером около 200 мкм при ε=8.5% (б). На вставках: 1 – емкостный зонд, 2 – предусилитель,
3 – датчик смещения.
Методика исследования неустойчиовй пластической деформации в деформируемом льде. В макроскопических экспериментах пластические свойства льда обычно исследуются на основе анализа кривых деформирования в «жесткой» испытательной машине или кривых ползучести [59]. Изучение неустойчивости пластического течения предпочтительнее проводить в условиях деформирования кристалла в «мягкой» машине, когда задан закон нагружения σ =σ( t ), а измеряемой величиной является деформация ε( t ) . Образцы моно- и поликристаллического льда размерами 12×18×30 мм3 подвергались одноосному сжатию в «мягкой» деформационной машине с постоянной скоростью нагружения σ0 = 5×10−3 МПа/с при температуре
T = 250 К (Рисунок 4.9а).
87
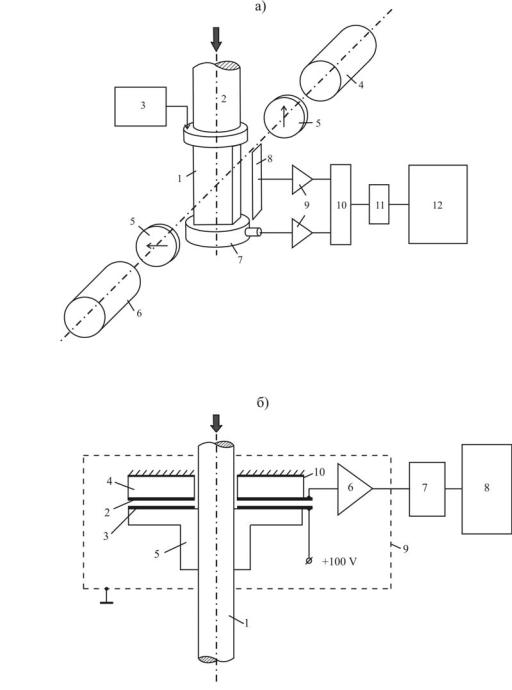
Рисунок 4.9 − а). Схема экспериментальной установки для исследования скачкообразной пластической деформации и разрушения льда поляризационно-оптическим, акустическим
иэлектромагнитным методами: 1 – образец, 2 – шток мягкой деформационной машины, 3
–блок измерения деформации, содержащий механический индикатор смещения и емкостной датчик смещения (Рис. 3.1б), 4 – коллимированный источник света, 5 – поляроиды, 6 – цифровая видеокамера, 7 – пьезодатчик, 8 – емкостный зонд, 9 –
высокоомный предусилитель, 10 – коммутатор, 11 – АЦП, 12 – компьютер; б) Схема емкостного датчика смещения: 1 –шток деформационной машины, 2 и 3 – неподвижная и подвижная обкладки емкостного датчика (конденсатора), 4 и 5 –
неподвижное и подвижное (укрепленное на штоке машины) тефлоновые кольца, 6 – предусилитель, 7 – АЦП, 8 – компьютер, 9 – экран толщиной 10 мм, выполненный из железа армко, 10 – неподвижная опора.
88

Образцы вырезались ниточной пилой из блоков пресноводного (речного) льда с различным средним размером зерна от ~1 до ~100 мм. Монокристаллические образцы выпиливались из крупных зерен для деформирования в базисной системе скольжения:
c − ось составляла угол |
≈ 40 −50D с осью сжатия. Для исследования влияния границы |
зерна на зарождение |
и иммобилизацию дислокаций и трещин приготавливались |
«бикристаллы» – образцы, состоящие из двух зерен, т.е. содержащие одну границу зерна. Используемые поликристаллические образцы имели размер зерна в диапазоне от 1 до 5
мм со средним значением d = 3 мм. Для стабилизации структуры все образцы подвергались изотермическому отжигу при T = 263 К в течение ~103 часов.
В ходе деформирования образцы видеофильмировались в проходящем поляризованном свете для выявления моментов зарождения полос скольжения и трещин по эволюции их фотоупругой картины. Потенциал нестационарного электрического поля
(сигнал ЭМЭ) измеряли с помощью плоского емкостного зонда размером 20 ×30 мм2,
расположенного на расстоянии 5 мм от поверхности образца. Учитывая, что характерные времена эволюции трещин и дислокационных полос скольжения в кристаллах находятся в
интервале t ~ 10−6 −100 с, полоса пропускания канала регистрации электрического
сигнала выбиралась равной 1 Гц – 3 МГц. Канал регистрации состоял из высокоомного широкополосного предусилителя ( R0 =1012 Ом, C0 = 20 пФ), аналого-цифрового преобразователя (АЦП) с тактовой частотой до 500 кГц и компьютера.
В ряде экспериментов синхронно с регистрацией сигнала ЭМЭ записывали сигнал пьезодатчика, расположенного в нижней опоре образца (Рисунок 4.9а). Блок измерения деформации состоял из трех датчиков: механического (индикатор перемещения с точностью 5 мкм, в ряде случаев использовали индикатор с точностью 2 мкм),
оптического (видеокамера, отслеживающая движение верхнего захвата машины, точность
– 10 мкм, а при использовании видеосъемки через микроскоп – точность порядка 1 мкм) и
емкостного датчика смещения штока (точность ~10 нм в полосе частот ~1 – 300 Гц) (Рисунок 4.9б).
Емкостный датчик смещения состоит из двух параллельных пластин (подвижной,
укрепленной на штоке, и неподвижной, укрепленной на базе). Пластины выполнены из латуни в виде колец площадью 50 см2, расположенных на начальном расстоянии 3 мм друг от друга. Пластины образуют конденсатор переменной емкости, запитанный постоянным напряжением U0 = 100 В. В ходе скачка пластической деформации емкость
датчика скачкообразно изменяется и на неподвижной пластине возникает импульсный
89
сигнал, который усиливается предусилителем, оцифровывается с помощью АЦП и подается на компьютер. Если время развития неустойчивости пластического течения t
меньше постоянной времени дифференцирования импульсного предусилителя τR = R0C0 ,
то форма фронта выходного сигнала без искажений воспроизводит форму скачка деформации. При обратном соотношении времен сигнал датчика пропорционален производной по времени смещения штока, т.е. скорости деформации, развиваемой в скачке.
90