

Затухающие колебания пружинного маятника
![]()
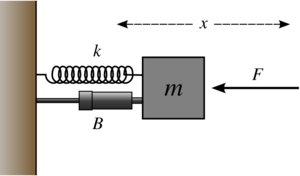
Модель пружинного маятника.B— механизм, обеспечивающий затухание.F— внешняя сила (в примере не присутствует).
Пускай имеется система, состоящая из пружины(подчиняющейсязакону Гука), один конец которой жёстко закреплён, а на другом находится тело массойm. Колебания совершаются в среде, где сила сопротивления пропорциональна скорости с коэффициентомc(см.вязкое трение).
Тогда второй закон Ньютонадля рассматриваемой системы запишется так:
![]()
где
![]() —
сила сопротивления,
—
сила сопротивления,![]() —
сила упругости
—
сила упругости
![]() ,
,![]() ,
то есть
,
то есть
![]()
или в дифференциальной форме
![]()
где k— коэффициент упругости взаконе Гука,c— коэффициент сопротивления, устанавливающий соотношение между скоростью движения грузика и возникающей при этом силой сопротивления.
Для упрощения вводятся следующие
обозначения:

Величину
![]() называют
собственной частотой системы,
называют
собственной частотой системы,![]() —
коэффициентом затухания.
—
коэффициентом затухания.
Тогда дифференциальное уравнение принимает вид
![]()
Сделав замену
![]() ,
получаютхарактеристическое
уравнение
,
получаютхарактеристическое
уравнение
![]()
Корни которого вычисляются по следующей формуле
![]()
Решения

![]()
Зависимость графиков колебаний от
значения
![]() .
.
В зависимости от величины коэффициента затухания решение разделяется на три возможных варианта.
Апериодичность
Если
![]() ,
то имеется два действительных корня, и
решение дифференциального уравнения
принимает вид:
,
то имеется два действительных корня, и
решение дифференциального уравнения
принимает вид:
![]()
В этом случае колебания с самого начала экспоненциально затухают.
Граница апериодичности
Если
![]() ,
два действительных корня совпадают
,
два действительных корня совпадают![]() ,
и решением уравнения является:
,
и решением уравнения является:
![]()
В данном случае может иметь место временный рост, но потом — экспоненциальное затухание.
Слабое затухание
Если
![]() ,
то решением характеристического
уравнения являются два комплексно
сопряжённых корня
,
то решением характеристического
уравнения являются два комплексно
сопряжённых корня
![]()
Тогда решением исходного дифференциального уравнения является
![]()
Где
![]() —
собственная частота затухающих колебаний.
—
собственная частота затухающих колебаний.
Константы
![]() и
и![]() в
каждом из случаев определяются из
начальных условий:
в
каждом из случаев определяются из
начальных условий:![]()
Логарифмический декремент затухания - безразмерная характеристика затухающих колебаний, измеряемая натуральным логарифмом отношения двух последовательных максимальных отклонений колеблющейся величины в одну и ту же сторону.
Общие понятия теории собственных колебаний.
Собственными называются колебания, которые совершает система около положения устойчивого равновесия после первоначального возмущения под действием только внутренних сил.
Какая сила должна действовать на систему, чтобы колебания были гармоническими?Так как для гармонических колебаний уравнение, связывающее ускорение и координату материальной точки выглядят как
а = - w2·х,
то согласно II закону Ньютона справедливо следующее равенство:
F = m·a = - m·w2·х = - k·x, (10.1)где k - постоянная величина.
Итак, тело совершает гармонические колебания, если сила, возвращающая его в положение равновесия, пропорциональна смещению и направлена в противоположную этому смещению сторону. Такая сила называется квазиупругой.
На практике зависимость F(x)является более сложной. Однако, при малых значениях величиныхэту функцию можно разложить в ряд:
|F(x)| = k·x + k1·x2 + k2·x3 + ...
и пренебречь слагаемыми более высокого, чем 1 порядка малости. Следовательно, любая система с одной степенью свободы при достаточно малом отклонении от положения равновесия будет гармонически колебаться.
![]()
 Рис.
10.1.
Рис.
10.1.
Уравнение динамики собственных колебаний.Рассмотрим колебания груза на пружине, считая, что вся масса сосредоточена в грузе, а упругость - в пружине. Прих= 0 пружина не деформирована (см. рис. 10.1). Предположим, что сила трения в системе отсутствуетFтр= 0. В случае смещения тела от положения равновесия возникает сила упругости, действующая на тело и стремящаяся возвратить его в положение равновесия. Поскольку при малых деформацияххэта сила равнаF = - k·x, то уравнение динамики движения груза согласно II закону Ньютона можно записать в виде:
m·a = - k·x. (10.2)
Поскольку ускорение - есть вторая производная от координаты по времени, то решив дифференциальное уравнение (10.2), найдем зависимость x(t). В теории дифференциальных уравнений показано, что общим решением уравнений типаx'' + w02·x = 0выражается зависимостью вида:x = A·cos(w0·t + 0).
Можно рассуждать также следующим образом. Из (10.2) имеем, что для гармонических колебаний a = - w02·x, т.е. ускорениеапропорциональнохи направлено в противоположную к нему сторону. Следовательно, колебания груза в случае выполнения условия (10.2) являются гармоническими и описываются уравнением:
x = A·cos(w0·t + 0), (10.3)где w0 = (k/m)1/2 - собственная частота колебаний.
Значение w0зависит только от физических свойств системы и не зависит от начальных условий.
![]()
Расчет параметров собственных колебаний. АмплитудаA и начальная фаза0, называемые параметрами колебаний, не зависят от свойств системы, а определяются только начальными условиями, т.е. значением смещения и скорости в начальный момент времени:
x(0) = x0; (0) = 0.
Задав x0и0, получим два уравнения для расчета амплитуды и начальной фазы:
x0 = A·sin 0; (10.4) 0 = A·w0·cos 0. (10.5)
Уравнения (10.4) и (10.5) задают значения Aи0.
A = (x02 + 02/w02)1/2; tg 0 = x0·w0/0.
 Рис.
10.2. Крутильные колебания.
Рис.
10.2. Крутильные колебания.
Примеры собственных колебаний. Крутильные колебания(см. рис. 10.2). Пусть- угловая координата,I- момент инерции,K- модуль кручения. Уравнение динамики крутильных колебаний имеет вид:
I· = - K·или'' = - K·/I. (10.6)
Сравнивая уравнения (10.6) и (10.1), видим, что они аналогичны. Следовательно, решение уравнения (10.6) имеет вид гармонической функции:
(t) = max·sin((K/I)1/2·t + 0).
 Рис.
10.3. Колебания физического маятника.
Рис.
10.3. Колебания физического маятника.
Физический маятник (см. рис. 10.3). Физическим маятником называется система, способная совершать колебания около положения равновесия, при этом массу системы нельзя считать сосредоточенной в одной точке. Введем обозначения:O- точка вращения;С- положение центра масс маятника;l- его длина;- угол отклонения от положения равновесия. Уравнение динамики вращательного движения для физического маятника в проекции на ось вращения в случае его малых колебаний запишем в виде:
Mz = ·'' = - m·g·l·sin = - m·g·l·.
Решение этого уравнения имеет следующий вид:
(t) = max·sin(w0·t + 0), где w0 = (m·g·l/I)1/2.
Для математического маятника момент инерции и значение собственной частоты колебаний будут равны:
I = m·l2и w0 = (g/l)1/2.
Собственную частоту физического маятника можно представить в виде, аналогичном выражению для математического маятника:
w0 = (g/lприв)1/2,где lприв = I/(m·l) - приведенная длина маятника.
Вынужденные колебания—колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебанияотличаются от вынужденных колебаний тем, что последние вызваныпериодическимвнешним воздействием и происходят счастотойэтого воздействия, в то время как возникновение автоколебаний и ихчастотаопределяются внутренними свойствами самой автоколебательной системы.
Наиболее простой и содержательный
пример вынужденных колебаний можно
получить из рассмотрения гармонического
осциллятораи вынуждающей силы,
которая изменяется по закону:![]() .
.