

Указания к выполнению задания
Для выполнения первого пункта задания необходимо изобразить свой вариант рисунка в конечный момент, т.е. когда тело 1пройдет путьs1. Теорему об изменении кинетической энергии системы надо применить в виде
![]() ,
,
где
![]() – кинетическая энергия системы в
конечный и начальный моменты времени;
– кинетическая энергия системы в
конечный и начальный моменты времени;![]() – суммы работ внутренних и внешних сил
механической системы. При выбранных
условиях во всех вариантах задания
– суммы работ внутренних и внешних сил
механической системы. При выбранных
условиях во всех вариантах задания
![]() .
.
Кинетическую энергию Tмеханической системы в конечный момент времени следует представить как сумму кинетических энергий, входящих в эту систему тел. При этом для грузов, движущихся поступательно:
![]() ;
;
для блоков, вращающихся вокруг неподвижных осей:
![]() ,
,
где
![]() –момент инерции тела относительно
оси вращения; –
его угловая скорость;
–момент инерции тела относительно
оси вращения; –
его угловая скорость;
для тел, совершающих плоское движение:
![]() ,
,
где
![]() - скорость центра масс этого тела;
- скорость центра масс этого тела;
![]() – момент инерции относительно оси,
проходящей перпендикулярно плоскости
движения через центр масс;
– угловая скорость тела. При
вычислении кинетической
– момент инерции относительно оси,
проходящей перпендикулярно плоскости
движения через центр масс;
– угловая скорость тела. При
вычислении кинетической
энергии тел механизма скорости их центров масс, а также угловые скорости подвижных и неподвижных блоков и катков необходимо выразить через скорость первого груза.
Затем на рисунке следует изобразить те из внешних сил, работа которых будет отлична от нуля.
Таблица 7
Варианты задания
|
Вариант |
m1 |
m2 |
m3 |
m4 |
i2x |
i3x |
f |
, см |
|
1 |
8m |
m |
m |
m |
|
- |
0,2 |
- |
|
2 |
5m |
m |
m |
- |
|
- |
- |
0,1 |
|
3 |
m |
5m |
m |
m |
|
- |
0,2 |
- |
|
4 |
6m |
2m |
m |
- |
|
- |
0,1 |
0,1 |
|
5 |
4m |
m |
m |
m |
- |
|
0,15 |
- |
|
6 |
3m |
m |
2m |
- |
- |
1,2r |
0,2 |
0,1 |
|
7 |
4m |
2m |
m |
m |
- |
|
0,15 |
0,1 |
|
8 |
4m |
m |
2m |
- |
- |
|
0,1 |
0,15 |
|
9 |
8m |
2m |
m |
2m |
- |
|
0,1 |
- |
|
10 |
5m |
m |
m |
- |
1,5r |
- |
0,1 |
0,1 |
|
11 |
6m |
2m |
m |
m |
|
- |
- |
0,15 |
|
12 |
4m |
2m |
m |
m |
|
- |
0,2 |
0,15 |
|
13 |
6m |
m |
2m |
4m |
- |
|
0,1 |
0,1 |
|
14 |
2m |
m |
2m |
m |
|
- |
- |
0,1 |
|
15 |
6m |
3m |
2m |
m |
|
|
- |
0,15 |
|
16 |
8m |
2m |
3m |
m |
|
|
0,15 |
0,1 |
|
17 |
5m |
m |
m |
- |
|
|
- |
0,2 |
|
18 |
4m |
2m |
m |
- |
|
|
0,1 |
0.1 |
|
19 |
6m |
3m |
2m |
m |
1,3r |
1,2r |
- |
0.1 |
|
20 |
m |
2m |
m |
m |
1,4r |
- |
- |
0,15 |
|
21 |
4m |
2m |
m |
m |
|
- |
0,1 |
- |
|
22 |
3m |
2m |
2m |
m |
|
|
0,1 |
0,1 |
|
23 |
4m |
m |
m |
4m |
- |
|
0,1 |
0,05 |
|
24 |
8m |
m |
2m |
m |
- |
|
0,15 |
- |
|
25 |
8m |
2m |
m |
3m |
|
- |
0,15 |
0,1 |
|
26 |
8m |
m |
2m |
2m |
1,2r |
- |
0,1 |
- |
|
27 |
4m |
m |
m |
m |
|
|
0,15 |
0,1 |
|
28 |
m |
3m |
2m |
m |
|
|
- |
0,1 |
|
29 |
m |
3m |
4m |
m |
|
1.4r |
0,1 |
0,05 |
|
30 |
8m |
m |
m |
m |
- |
1,2r |
0,1 |
- |
Сумма их работ будет складываться:
работы силы тяжести тел
![]() ,
,
где g – ускорение свободного падения;h– высота, на которую опускается или поднимается центр масс тела в поле силы тяжести. Знак “+” выбирается, если тело опускается вниз, знак “–” – в противоположном случае;
Таблица 8
Данные к заданию
|
Группа |
|
m, кг |
r, см |
|
с, Н/см |
|
|
|
1 |
3,00 |
10 |
30 |
1,0 |
380 |
1,5 |
2 |
|
2 |
2,25 |
6 |
22 |
0,8 |
300 |
1,7 |
1 |
|
3 |
2,00 |
15 |
25 |
0,5 |
400 |
2,0 |
3 |
|
4 |
1,75 |
5 |
35 |
0,3 |
350 |
1,2 |
5 |
|
5 |
2,50 |
12 |
20 |
0,6 |
200 |
1,0 |
4 |
|
6 |
2,75 |
8 |
27 |
0,4 |
250 |
1,5 |
6 |
работы силы трения скольжения (для вариантов, в которых указан коэффициент трения скольжения груза f):
![]() ,
,
где N – модуль нормальной реакции соприкасающихся тел;s– путь, пройденный этим грузом;
работы сил трения качения (для вариантов, в которых указан коэффициент трения качения катка δ):
![]() ,
,
где φ – угол поворота катка.
Подставляя найденные выражения кинетической энергии системы и суммы работ внешних сил в теорему об изменении кинетической энергии, получают уравнение для определения скорости первого груза.
Выполнение второй части курсовой работы следует начать с нового рисунка. Так как для решения этой части задания необходимо применить
общее уравнение динамики
![]() ,
,
то на рисунке надо изобразить все активные силы, т.е. те силы тяжести и реакции внешних связей, которые будут совершать ненулевую работу на возможных перемещениях точек их приложения и даламберовы силы инерции.
Если тело совершает поступательное движение, то элементарные силы инерции всех его точек приводятся к равнодействующей
![]() ,
,
линия действия которой проходит через центр масс этого тела. При вращательном движении твердого тела, имеющего плоскость материальной симметрии, вокруг оси x, перпендикулярной этой плоскости и проходящей через его центр масс, – к паре сил, расположенной в плоскости материальной симметрии. Ее алгебраический момент
![]() .
.
Если тело, имеющее плоскость материальной симметрии, совершает плоское движение параллельно этой плоскости, то система из элементарных сил инерции всех его точек при приведении к центру масс тела заменяется силой
![]()
и парой сил, расположенной в плоскости материальной симметрии, с алгебраическим моментом
![]() .
.
Силы инерции следует указывать против направлений соответствующих ускорений, а направления моментов сил инерции – против направлений угловых ускорений соответствующих тел.
Во второй части
курсового задания требуется найти
ускорение
![]() первого тела. Так как исследуемая
механическая система имеет одну степень
свободы, то силы инерции и моменты сил
инерции тел можно выразить через одну
неизвестную величину
первого тела. Так как исследуемая
механическая система имеет одну степень
свободы, то силы инерции и моменты сил
инерции тел можно выразить через одну
неизвестную величину![]() .
Для этого в первой части курсовой работы
нужно найти зависимости скоростей
центров масс тел, совершающих поступательное
и плоское движения, а также угловых
скоростей тел, совершающих вращательное
и плоское движения, через скорость
первого тела и продифференцировать их
по времени.
.
Для этого в первой части курсовой работы
нужно найти зависимости скоростей
центров масс тел, совершающих поступательное
и плоское движения, а также угловых
скоростей тел, совершающих вращательное
и плоское движения, через скорость
первого тела и продифференцировать их
по времени.
В курсовой работе
рассматривается механическая система,
на которую наложены голономные,
стационарные, неосвобождающие связи.
Отсюда следует, что возможные перемещения
![]() точек приложения активных сил и
даламберовых сил инерции можно
направить так же, как и скорости этих
точек. При этом зависимости между ними
будут такими же, как и между их скоростями.
Изобразив на рисунке возможные
перемещения и выразив их модули через
точек приложения активных сил и
даламберовых сил инерции можно
направить так же, как и скорости этих
точек. При этом зависимости между ними
будут такими же, как и между их скоростями.
Изобразив на рисунке возможные
перемещения и выразив их модули через![]() ,
можно приступить к составлению общего
уравнения динамики: нахождению суммы
скалярных произведений указанных на
рисунке активных сил и даламберовых
сил инерции на возможные перемещения
точек их приложения.
,
можно приступить к составлению общего
уравнения динамики: нахождению суммы
скалярных произведений указанных на
рисунке активных сил и даламберовых
сил инерции на возможные перемещения
точек их приложения.
Полученное таким образом из общего уравнения динамики равенство будет являться уравнением для определения ускорения первого груза.
Для выполнения третьей части курсовой работы (нахождение реакций внешних и внутренних связей механической системы) следует воспользоваться принципом Д’Аламбера: при движении механической системы геометрическая сумма внешних, внутренних сил и сил инерции Д’Аламбера равна нулю для каждой точки механической системы.
При этом желательно придерживаться следующего порядка:
изобразить на рисунке каждое тело механической системы в отдельности, приложить к ним силы тяжести, реакции внешних и внутренних связей и силы инерции Д’Аламбера;
используя найденные в предыдущей части курсовой работы ускорения, вычислить модули сил инерции и значения моментов сил инерции каждого из нарисованных тел;
составить уравнения кинетостатики для каждого тела.
В результате получается замкнутая система уравнений, решение которой позволяет определить составляющие реакций внешних и внутренних связей.
В четвертой части курсового задания требуется с помощью уравнений Лагранжа второго рода найти ускорение первого тела. Так как механическая система имеет одну степень свободы, то для нее выбирается только одна обобщенная координата, в качестве которой удобно взять q –путь первого тела. Тогда уравнение Лагранжа второго рода будет иметь вид
![]()
![]() ,
,
где Т –
кинетическая энергия механической
системы;Q – обобщенная
сила, соответствующая обобщенной
координатеq. Выражение
кинетической энергии было найдено в
первой части работы, поэтому достаточно
ее просто переписать, заменив![]() на
на![]() .
Обобщенную силуQследует определить по формуле
.
Обобщенную силуQследует определить по формуле
![]() .
.
Для этого необходимо:
изобразить на рисунке активные силы
 ;
;обобщенной координате qдать возможное приращение δq;
найти возможные перемещения точек приложения активных сил в зависимости от приращения δq;
составить сумму работ нарисованных сил на возможных перемещениях точек их приложения, из которой после сокращения числителя и знаменателя на δq получается выражение обобщенной силы.
Условия
курсового задания составлены таким
образом, что частная производная от
кинетической энергии по обобщенной
координате
![]() во
во
всех вариантах
равна нулю. Вычислив частную производную![]() ,
затем полную
,
затем полную![]() производную по времени и подставив
полученный результат вместе с обобщенной
силой в уравнение Лагранжа второго
рода, получают уравнение для нахождения
производную по времени и подставив
полученный результат вместе с обобщенной
силой в уравнение Лагранжа второго
рода, получают уравнение для нахождения![]() .
.
Для исследования свободных колебаний данной механической системы необходимо сделать новый рисунок, изобразить на нем заданную систему тел и пружину, один конец которой прикреплен к центру масс указанного в условии задачи тела, а другой – неподвижен. Ось пружины должна совпадать с траекторией движения центра масс этого тела.
Исследование колебательного процесса удобно проводить при помощи уравнения Лагранжа второго рода, выбрав в качестве обобщенной координаты qпуть, пройденный первым грузом, причем начало отсчета обобщенной координаты следует выбрать в точке, совпадающей с центром масс этого тела в положении статического равновесия механической системы. При таком выборе обобщенной координаты кинетическая энергия механической системы будет иметь тот же вид, что и в предыдущей части курсовой работы. В данном случае ее удобно представить как
![]() ,
,
где a– коэффициент инерции механической системы.
Действие пружины на тело, к которому она присоединена, следует заменить ее реакцией – силой упругости, подчиняющейся закону Гука:
![]() ,
,
где с–
коэффициент жесткости пружины,![]() –
статическая деформация пружины, т. е.
деформация пружины в положении
статического равновесия механической
системы; а
–
статическая деформация пружины, т. е.
деформация пружины в положении
статического равновесия механической
системы; а![]() – ее динамическая деформация, т.е. путь,
пройденный подвижным концом пружины
от положения статического равновесия.
– ее динамическая деформация, т.е. путь,
пройденный подвижным концом пружины
от положения статического равновесия.
Обобщенную
силу надо находить точно так же, как и
в четвертой части курсовой работы. Так
как в условии задачи сказано, что силами
трения скольжения и трения качения
следует пренебречь, то к активным силам
следует относить только силы тяжести,
которые совершают ненулевую работу на
возможных перемещениях точек их
приложения, и силу упругости. В выражение
обобщенной силы, кроме известных величин,
будет входить обобщенная координата qи статическая деформация пружины![]() .
Неизвестное значение
.
Неизвестное значение![]() можно определить из условия равновесия
механической системы в обобщенных
силах:
можно определить из условия равновесия
механической системы в обобщенных
силах:![]() .
После нахождения
.
После нахождения![]() и подстановки ее в выражение обобщенной
силы величинуQжелательно представить в виде
и подстановки ее в выражение обобщенной
силы величинуQжелательно представить в виде
![]() .
.
Величина
![]() называется коэффициентом жесткости
системы.
называется коэффициентом жесткости
системы.
Подставляя выражение кинетической энергии и обобщенной силы в уравнение Лагранжа второго рода, получаем
![]() .
.
Поделив обе
части последнего равенства на аи
введя обозначение![]() ,
,
получим дифференциальное уравнение собственных колебаний механической системы с одной степенью свободы:
![]() .
.
Величина
![]() называется циклической или круговой
частотой колебаний. Период собственных
колебаний τ механической системы
связан с круговой частотой равенством
называется циклической или круговой
частотой колебаний. Период собственных
колебаний τ механической системы
связан с круговой частотой равенством
![]() .
.
Полученное выше уравнение является линейным однородным дифференциальным уравнением второго порядка с постоянными коэффициентами. Его решение следует отыскивать в амплитудной форме:
![]() ,
,
где А –
амплитуда колебаний; α – начальная
фаза колебаний; определяются из начальных
условий:
![]() ,
,
![]() .
.
 ,
,
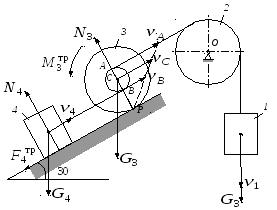
Пример
Дано:
Механическая система состоит из четырех
тел (рис. 15);![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;f = 0,1;
;f = 0,1;
δ = 0,001 м;
![]() ;
;
![]() кг;r = 0,25 м;
кг;r = 0,25 м;![]() м;с= 30 000 Н/м;
м;с= 30 000 Н/м;
![]() м;
м;![]() м/с.
м/с.
1. Используя теорему об изменении
кинетической энергии, найдите скорость
первого груза тот в момент времени,
когда пройденный им путь будет равным
![]() .
.
Решение.Воспользуемся теоремой об
изменении кинетической энергии. Так
как в начальный момент времени механическая
система находилась в покое,![]() .
По условию задания нити, соединяющие
тела механической системы предполагаются
нерастяжимыми, проскальзывание между
телами отсутствует, поэтому
.
По условию задания нити, соединяющие
тела механической системы предполагаются
нерастяжимыми, проскальзывание между
телами отсутствует, поэтому![]() .
Тогда из теоремы следует:
.
Тогда из теоремы следует:
![]()
 .
.
Рис. 15
Вычислим T– кинетическую энергию системы. Груз1совершает поступательное движение, значит:
![]() .
.
Блок 2вращается вокруг неподвижной оси, поэтому
![]() .
.
Момент инерции блока 2:
![]() ,
а его угловая скорость
,
а его угловая скорость
![]() .
Таким образом, кинетическая энергия
блока2принимает
.
Таким образом, кинетическая энергия
блока2принимает
вид
![]() .
.
Так как каток 3совершает плоское движение:
![]() .
.
Поскольку нити предполагаются
нерастяжимыми,
![]() .
ТочкаPявляется
мгновенным центром скоростей третьего
тела, значит:
.
ТочкаPявляется
мгновенным центром скоростей третьего
тела, значит:
![]() .
.
Откуда следует:
![]() .
.
Момент инерции катка 3определим по
заданному радиусу инерции![]() :
:
![]() .
.
Подставляя
![]() и
и![]() в выражение
в выражение
![]() ,
получим
,
получим
![]() .
.
Кинетическая энергия груза 4:
![]() .
.
Так как нити предполагаются нерастяжимыми,
![]() .
Анализируя движение третьего тела,
выразим
.
Анализируя движение третьего тела,
выразим![]() :
:
![]() .
.
Тогда
![]() .
.
Складывая теперь кинетические энергии тел механической системы, найдем
![]() .
.
Вычислим сумму работ приложенных к системе внешних сил:
![]() :
:
Работа силы тяжести груза 1:
![]() .
.
Аналогично определяется работа силы тяжести катка:
![]() .
.
Путь, пройденный точкой С, можно
определить из равенства
![]() ,
представив его в виде
,
представив его в виде
![]() .
Умножая последнее соотношение наdtи интегрируя, получим
.
Умножая последнее соотношение наdtи интегрируя, получим![]() .
Тогда
.
Тогда
![]() .
.
Аналогичным образом из
![]() несложно получить
несложно получить
![]() .
.
Найдем работу сил трения качения катка 3.
![]() .
.
Поэтому
![]() .
.
Работа силы тяжести груза 4:![]() ,
где
,
где![]() находится из выражения
находится из выражения![]() через
через![]() путем интегрирования:
путем интегрирования:![]() .
.
![]() .
.
Последнее слагаемое – работу сил трения скольжения груза 4
![]()
определим по формуле
![]() .
.
Тогда сумма работ внешних сил равна:
![]() .
.
Приравнивая выражение кинетической энергии механической системы к сумме работ внешних сил, получим равенство, из которого следует
 м/с.
м/с.
2. Применяя общее уравнение динамики, найдите: ускорения тел, движущихся поступательно; ускорения центров масс тел, совершающих плоское движение; угловые ускорения тел, совершающих вращательное и плоское движения.
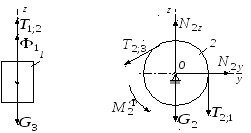
Решение.В соответствии с общим уравнением динамики изобразим на рисунке активные силы и даламберовы силы инерции (рис. 16).
Так как груз 1совершает поступательное движение, элементарные силы инерции всех его точек приводятся к равнодействующей, равной по модулю
![]() .
.
Линия действия вектора![]() проходит через центр масс этого тела.
Блок2вращается вокруг неподвижной
оси, поэтому силы инерции точек этого
тела приводятся к паре сил с моментом,
абсолютное значение которого
проходит через центр масс этого тела.
Блок2вращается вокруг неподвижной
оси, поэтому силы инерции точек этого
тела приводятся к паре сил с моментом,
абсолютное значение которого![]() .
Момент инерции
.
Момент инерции![]() был определен ранее (см. с. 45), а угловое
ускорение
был определен ранее (см. с. 45), а угловое
ускорение![]() находится дифференцированием по времени
угловой скорости
находится дифференцированием по времени
угловой скорости![]() :
:![]() .
Тогда
.
Тогда
![]() .
.
Элементарные силы инерции катка 3приводятся в его центре масс к силе,
модуль которой![]() ,
и паре сил с моментом, равным по абсолютному
значению
,
и паре сил с моментом, равным по абсолютному
значению![]() .
Момент инерции
.
Момент инерции![]() найден ранее, а ускорение
найден ранее, а ускорение![]() и угловое ускорение
и угловое ускорение![]() определяются из выражений
определяются из выражений![]() и
и![]() дифференцированием их по времени:
дифференцированием их по времени:![]() .
Отсюда
.
Отсюда
![]() ,
,![]() .
.
Груз 4движется поступательно, значит:
![]() ,
,
где
![]() находится из
находится из![]() дифференцированием по времени.
дифференцированием по времени.
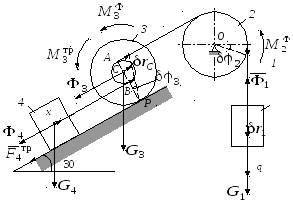
Рис. 16
Придадим центру масс груза 1возможное перемещение![]() .
Так как наложенные на механическую
систему связи являются стационарными,
неосвобождающими и голономными, значения
возможных перемещений других точек
системы выражаются через
.
Так как наложенные на механическую
систему связи являются стационарными,
неосвобождающими и голономными, значения
возможных перемещений других точек
системы выражаются через![]() точно так же, как скорости этих точек
через
точно так же, как скорости этих точек
через![]() :
:
![]() .
.
Составим общее уравнение динамики:
![]()
Подставляя сюда найденные ранее момент силы трения качения, силу трения скольжения, силы и моменты сил инерции, а также выражения возможных перемещений, получим:
![]() .
.
Откуда окончательно:
![]() м/с2.
м/с2.
Тогда
![]() м/с2;
м/с2;![]() м/с2;
м/с2;![]() с-2;
с-2;![]() с-2.
с-2.
3. Воспользовавшись принципом Д’Аламбера и найденными в предыдущем пункте ускорениями найти реакции внешних и внутренних связей механической системы.
Решение.Для определения реакций связей изобразим по отдельности тела механической системы (рис. 17), приложив к ним силы тяжести, реакции внешних и внутренних связей и даламберовы силы инерции. В соответствии с принципом Д’Аламбера, система сил, приложенных к грузу1(рис. 17,а), находится в равновесии:
![]() Н.
Н.
Составим уравнения равновесия системы сил, приложенных к блоку 2(рис. 17,б):
![]()
![]() ,
,
![]() .
.
Из последнего уравнения, учитывая, что
![]() ,
а момент
,
а момент![]() найден, следует
найден, следует
![]() Н.
Н.
Тогда из двух других уравнений следует
![]() Н;
Н;![]() Н;
Н;
![]() Н.
Н.
а б
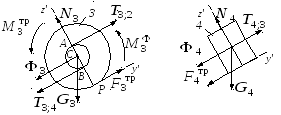
в г
Рис. 17
Составим уравнения равновесия для системы сил, приложенных к катку 3(рис. 17,в):
![]() ,
,
![]() ,
,

Разрешая
последнее уравнение относительно
![]() ,
получим
,
получим
![]() Н.
Н.
Теперь можно определить силу трения сцепления:
![]() Н.
Н.
Уравнения равновесия системы сил, приложенных к грузу 4:
![]() ;
;![]() .
.
Последнее
равенство уже было использовано при
определении
![]() ,
а предыдущее может служить проверкой
полученных результатов:
,
а предыдущее может служить проверкой
полученных результатов:
![]() .
.
4. Выбрав в качестве обобщенной координаты пройденный грузом1путь и составив уравнение Лагранжа второго рода, найти ускорение этого груза.
Решение.Обозначим черезqпуть, пройденный первым телом за промежуток времени от 0 доt(рис. 18). Тогда уравнение Лагранжа второго рода будет иметь вид
![]() .
.
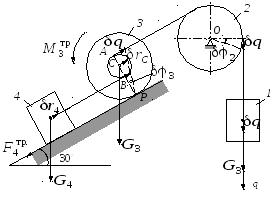
Рис. 18
Кинетическая энергия механической системы была определена в первой части курсовой работы. С учетом принятых обозначений ее необходимо записать следующим образом:
![]() .
.
Обобщенная сила Q:
![]()
![]() ,
,
Здесь вместо
![]() следует написать
следует написать![]() ,
а выражения возможных перемещений точек
приложения остальных активных сил через
,
а выражения возможных перемещений точек
приложения остальных активных сил через![]() были получены ранее:
были получены ранее:
![]() .
.
Подставляя
![]() и
и![]() в уравнение Лагранжа второго рода,
получим
в уравнение Лагранжа второго рода,
получим
![]() .
.
Откуда
![]() ,
т.е. результаты, полученные в первой и
четвертой пунктах решения задачи,
идентичны.
,
т.е. результаты, полученные в первой и
четвертой пунктах решения задачи,
идентичны.
5. Пусть
к центру масс тела 4 прикреплен один
конец пружины жесткостиc,
другой конец которой неподвижен. Ось
пружины совпадает с траекторией центра
масс указанного тела (рис. 19). В начальный
момент времени груз 1 был отклонен
от положения статического равновесия
на![]() и ему была сообщена начальная скорость
и ему была сообщена начальная скорость![]() .
Определить частоту и период малых
свободных колебаний механической
системы с одной степенью свободы,
пренебрегая силами трения и силами
сопротивления; найти уравнение движения
груза 1
.
Определить частоту и период малых
свободных колебаний механической
системы с одной степенью свободы,
пренебрегая силами трения и силами
сопротивления; найти уравнение движения
груза 1
![]() ,
приняв за начало отсчета положение
покоя груза1 (при статической
деформации пружины); найти амплитуду
колебаний этого груза.
,
приняв за начало отсчета положение
покоя груза1 (при статической
деформации пружины); найти амплитуду
колебаний этого груза.
Решение.Как и ранее, для решения задачи воспользуемся уравнением Лагранжа второго рода, выбрав в качестве обобщенной координаты перемещение груза1из положения статического равновесия.
Кинетическую энергию механической системы представим в виде
![]() ,
,
где а= 4,72m = 23,6 кг – коэффициент инерции системы тел. Так как в пятой части задания не учитываются силы трения скольжения и трения качения, обобщенная сила примет вид
![]() .
.
Сила упругости
определяется равенством
![]() ,
где динамическая деформация пружины в
данном задании равна перемещению центра
масс груза4:
,
где динамическая деформация пружины в
данном задании равна перемещению центра
масс груза4:
![]() .
.
Выражая, как
и ранее, возможные перемещения через
![]() ,
получим:
,
получим:
![]() .
.
Статическая
деформация пружины может быть найдена
из условия равновесия механической
системы в обобщенных силах:
![]() .
.
![]() м.
м.
Учитывая последнее равенство, обобщенную силу Qможно представить в виде
![]() ,
,
где
![]() Н/м – коэффициент жесткости механической
системы.
Н/м – коэффициент жесткости механической
системы.
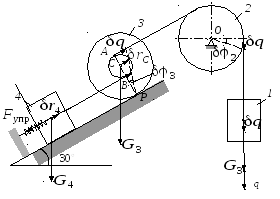
Рис. 19
Теперь несложно найти круговую частоту и период собственных колебаний:
![]() с-1,
с-1,![]() с.
с.
Амплитуда
колебаний Аи начальная фаза
колебаний α определяются из начальных
условий:
![]() ;
;
![]() .
.
 м,
м,
Уравнение движения груза 1:
![]() .
.
Список рекомендуемой литературы
Никитин Н.Н.Курс теоретической механики. М.: Высш. шк., 1990.
608 с.
Справочникпо теоретической механике / В.Н. Васильев и др. Чуваш. ун-т. Чебоксары, 1997. 164 с.
Мещерский И.В.Сборник задач по теоретической механике. М.: Наука, 1986. 448 с.
Сборникзаданий для курсовых работ по теоретической механике / под ред. А.А. Яблонского. М.: Интеграл-преф., 2005. 384 с.
Гусев В.А., Макаров В.В.Теоретическая механика: расчетно-графи-ческая и курсовая работы /Чуваш. ун-т. Чебоксары, 2002. 56 с.
Айзенберг Т.Б., Воронков И.М., Осецкий В.М.Руководство к решению задач по теоретической механике. М.: Высш. шк., 1968. 312 с.
Бать М.И., Джанелидзе Г.Ю., Кельзон А.С.Теоретическая механика в примерах и задачах: в 2 ч. М.: Наука, 1990.Ч.1. 532 с.; Ч.2. 428 с.
Мисюрев М.А.Методика решения задач по теоретической механике. М.: Высш. шк., 1962. 388 с.
Приложение