

1. Расчетно-графические работы Общие указания
Учебными планами для студентов дневного отделения МСФ предусмотрены две расчетно-графические работы.
Первая расчетно-графическая работа состоит из двух заданий по статике.
Первое задание. Исследование равновесия составной конструкции, состоящей из двух тел, к которой приложена плоская система сил. Выполнение этого задания следует начинать после изучения темы «Равновесие произвольной плоской системы сил», повторив предварительно определение, свойства и методы нахождения алгебраического момента силы относительно точки.
Второе задание. Необходимо найти реакции опор твердого тела, к которому приложена произвольная пространственная система сил. Перед его выполнением желательно просмотреть, как составляются уравнения равновесия пространственной системы сил, и повторить определение и свойства момента силы относительно оси.
Вторая расчетно-графическая работа состоит из двух заданий по кинематике.
Первое задание. Кинематическое исследование плоского многозвенного механизма. Его выполнение надо начинать после изучения темы «Плоское движение твердого тела». Перед выполнением задания необходимо повторить теорему о скоростях точек плоской фигуры, теорему о проекциях скоростей точек плоской фигуры, лежащих на одной прямой, на эту прямую, определение, свойства и методы нахождения мгновенного центра скоростей, теорему об ускорениях точек плоской фигуры.
Второе задание. Используя результаты предыдущей задачи, необходимо в заданный момент времени найти абсолютную скорость и абсолютное ускорение точки, совершающей сложное движение. Выполнение этой работы надо начать после изучения темы «Сложное движение точки».
Задания расчетно-графических работ следует выполнять на одной стороне развернутых тетрадных листов (формат А4). На первом (титульном) листе необходимо указать тему задания, номер варианта, группу, фамилию, инициалы и дату выполнения работы. При оформлении работы вначале надо полностью переписать условие задачи и выписать из таблицы необходимые для расчетов данные.
Решение должно сопровождаться краткими пояснениями. Все обозначения, линии, оси координат и векторы, упоминающиеся в решении, должны быть указаны на рисунке. В ходе решения приводятся числовые значения с указанием единиц полученных величин, а в конце приводится ответ.
Числовые расчеты необходимо проводить
с точностью до
![]() .
.
Сроки выполнения, сдачи на проверку и собеседования по каждому заданию устанавливает преподаватель, ведущий практические занятия.
При выполнении расчетно-графической работы можно использовать руководства по решению задач теоретической механики [6; 7; 8].
Расчетно-графическая работа по статике Основные положения статики
Свободным называется твердое тело, перемещение которого в пространстве не ограничено никакими связями. В противном случае тело называется несвободным.
При изучении равновесия тел в статике применяют аксиому освобождаемости от связей: эффект от действия связей таков же, как и от действия некоторых дополнительных сил, которые могут быть приложены к телу вместо отбрасываемых связей. Эти силы называют реакциями связей.
Перечислим основные типы реакций связей.
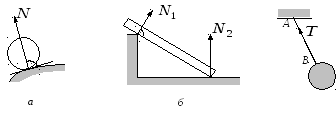
Гладкая
(силы трения отсутствуют) поверхность
и острый выступ. В этом
случае связь не дает перемещаться
изучаемому телу только в направлении
общего перпендикуляра к поверхностям
соприкасающихся тел, поэтому
реакция![]() будет
направлена вдоль этого перпендикуляра
в точке касания тел (рис. 1, а),
а когда одна из соприкасающихся
поверхностей является точкой (рис. 1,
б),
реакция направлена по нормали к другой
поверхности.
будет
направлена вдоль этого перпендикуляра
в точке касания тел (рис. 1, а),
а когда одна из соприкасающихся
поверхностей является точкой (рис. 1,
б),
реакция направлена по нормали к другой
поверхности.
Гибкая нерастяжимая
нить. Такая связь (рис.
2) не позволяет телу удаляться от точки
подвеса нити по направлению AB,
поэтому реакция (натяжение) нити
![]() направлена
вдоль нити к точке ее подвеса.
направлена
вдоль нити к точке ее подвеса.
![]()
![]()
Рис. 1 Рис. 2
Неподвижный и подвижный цилиндрические
шарниры на плоскости.Неподвижный
цилиндрический шарнир (рис. 3,а)
оставляет неподвижной точкуA,
расположенную в его центре, не
противодействуя вращению тела вокруг
этой оси. Реакция неподвижного шарнира
![]() перпендикулярна его оси. В отличие от
неподвижного, подвижный цилиндрический
шарнир (рис. 3,б) противодействует
перемещению точкиAтолько в направлении, перпендикулярном
плоскости его качения. Реакция шарнира
перпендикулярна его оси. В отличие от
неподвижного, подвижный цилиндрический
шарнир (рис. 3,б) противодействует
перемещению точкиAтолько в направлении, перпендикулярном
плоскости его качения. Реакция шарнира
![]() перпендикулярна оси шарнира и плоскости
качения. Неподвижный цилиндрический
шарнир можно представить в виде двух
невесомых нерастяжимых стержней (рис.
3,в), а подвижный – в виде одного
стержня (рис. 3,г).
перпендикулярна оси шарнира и плоскости
качения. Неподвижный цилиндрический
шарнир можно представить в виде двух
невесомых нерастяжимых стержней (рис.
3,в), а подвижный – в виде одного
стержня (рис. 3,г).
Р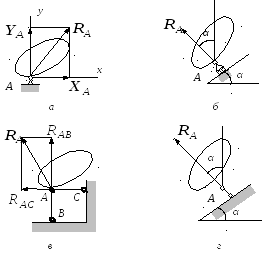 ис.
3
ис.
3
Жесткая
заделка балки (рис. 4)
противодействует перемещению точки A
в вертикальном и
горизонтальном направлениях, а также
повороту балки вокруг этой точки. При
таком креплении на защемленный конец
балки со стороны опорных плоскостей
действует система распределенных сил
реакций. Если эту систему привести к
центру A, ее можно
заменить на одну силу
![]() и пару сил с алгебраическим моментом
и пару сил с алгебраическим моментом
![]() .
.
Сферический шарнир (рис. 5) представляет собой шар, который внутри сферической полости может вращаться как угодно. Центр шара остается неподвижным. Реакцией такого шарнира является вектор в пространстве, приложенный к точке A.

Рис. 4
Подпятник и цилиндрический шарнир в
пространстве. Подпятник (точкаA,
рис. 6) представляет собой совокупность
цилиндрического шарнира и упорной
плоскости. Его реакция
![]() аналогична реакции сферического шарнира.
Цилиндрический подшипник (точкаB
) ограничивает перемещение тела в
пространстве в направлениях осейAx
иAy, не препятствуя
его перемещению в направлении осиAz.
Реакция такого шарнира
аналогична реакции сферического шарнира.
Цилиндрический подшипник (точкаB
) ограничивает перемещение тела в
пространстве в направлениях осейAx
иAy, не препятствуя
его перемещению в направлении осиAz.
Реакция такого шарнира
![]() перпендикулярна его оси, совпадающей
на рис. 6 с осьюAz.
перпендикулярна его оси, совпадающей
на рис. 6 с осьюAz.
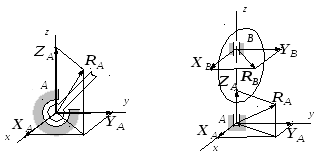
Рис. 5 Рис. 6