

Задание 3. Кинематический анализ многозвенного механизма
Положение многозвенного шарнирного плоского механизма, состоящего из треугольной пластины ABC, звеньевO1A,O2B,CD, соединенных друг с другом и с неподвижными опорамиO1иO2шарнирами и ползунаD, определяется координатами его узлов в координатной плоскостиxOy.
Точка O1
расположена в начале координат,
а координаты точекA,
B, C,DиO2приведены в табл. 5. Угол α между
направляющей ползуна и положительным
направлением осиOx,
закон изменения угловой скорости
![]() ведущего звенаO1Aи момент времениt1,соответствующий данному положению
механизма, заданы в табл. 6. Определите
для заданного положения механизма:
ведущего звенаO1Aи момент времениt1,соответствующий данному положению
механизма, заданы в табл. 6. Определите
для заданного положения механизма:
скорости точек A, B, C, D и угловые скорости всех его звеньев;
ускорения точек A,B и угловое ускорение звенаAB.
Указания к выполнению задания
Вначале, в
соответствии с номером своего варианта,
необходимо изобразить рисунок
многозвенного механизма. Затем определить
значение
![]() и направление скорости точкиAв соответствии с направлением угловой
скорости звенаO1A.
Скорость точкиВможно найти,
используя теорему о проекциях скоростей
двух точек твердого тела
и направление скорости точкиAв соответствии с направлением угловой
скорости звенаO1A.
Скорость точкиВможно найти,
используя теорему о проекциях скоростей
двух точек твердого тела
![]() (т.е.
(т.е.![]() ,
рис. 10) или через мгновенный центр
скоростей телаАВС.
,
рис. 10) или через мгновенный центр
скоростей телаАВС.
Необходимо
помнить, что каждое звено в данный
момент времени имеет свой МЦС и
свою угловую скорость. Например, у телаABCМЦС является
геометрическая точкаP1,
а МЦС звенаCDбудет
другая геометрическая точка –Р2.
Положение точекР1иР2следует определить аналитически. Так,
для нахождения точкиР1достаточно записать уравнения прямыхO1A,O2B(они являются перпендикулярами к векторам
скоростей![]() и
и![]() )
и найти их общее решение. Для нахождения
же точкиP2(МЦС
звенаCD) нужно записать
уравнение прямойCP1и прямой, перпендикулярной направляющим
ползунаD.
)
и найти их общее решение. Для нахождения
же точкиP2(МЦС
звенаCD) нужно записать
уравнение прямойCP1и прямой, перпендикулярной направляющим
ползунаD.
Таблица 5
Варианты задания 3
|
Вари- ант |
Координаты точек, см | ||||
|
|
A |
B |
C |
D | |
|
1 |
(10; 0) |
(4; 0) |
(7; 5) |
(5; 5) |
(10; 8) |
|
2 |
(10; 0) |
(5; 0) |
(5; 3) |
(3; 7) |
(8; 4) |
|
3 |
(10; 0) |
(5; 0) |
(5; 5) |
(0; 3) |
(3; 8) |
|
4 |
(10; 0) |
(7; 0) |
(13; 5) |
(7; 8) |
(3; 4) |
|
5 |
(10; 0) |
(5; 3) |
(7; 5) |
(6; 0) |
(1; -3) |
|
6 |
(10; 0) |
(5; 3) |
(10; 3) |
(8; 6) |
(0; 3) |
|
7 |
(10; 0) |
(5; 3) |
(5; 0) |
(8; 3) |
(5; 8) |
|
8 |
(10; 0) |
(5; 3) |
(7; 5) |
(7; 0) |
(4; -3) |
|
9 |
(10; 3) |
(5; 3) |
(5; 6) |
(0; 6) |
(5; 9) |
|
10 |
(10; 3) |
(4; 4) |
(7; 0) |
(7; 5) |
(0; 9) |
|
11 |
(10; 3) |
(4; 4) |
(5; 0) |
(8; 4) |
(0; 8) |
|
12 |
(10; 5) |
(3; 5) |
(7; 8) |
(5; 2) |
(10; 0) |
|
13 |
(10; 5) |
(3; 5) |
(7; 2) |
(6; 9) |
(0; 5) |
|
14 |
(10; 5) |
(5; 3) |
(7; 5) |
(5; 7) |
(10; 10) |
|
15 |
(10; 5) |
(3; 3) |
(9; 3) |
(7; 6) |
(2; 9) |
|
16 |
(7; 10) |
(5; 3) |
(10; 5) |
(5; 0) |
(10; 0) |
|
17 |
(7; 10) |
(4; 4) |
(7; 5) |
(3; 8) |
(0; 5) |
|
18 |
(7; 10) |
(3; 5) |
(2; 10) |
(7; 5) |
(5; 0) |
|
19 |
(7; 10) |
(0; 6) |
(4; 5) |
(4; 2) |
(10; 5) |
|
20 |
(5; 8) |
(5; 3) |
(4; 6) |
(10; 8) |
(11; 3) |
|
21 |
(5; 8) |
(4; 4) |
(10; 5) |
(4; 0) |
(8; 0) |
|
22 |
(5; 8) |
(3; 5) |
(0; 10) |
(8; 2) |
(10; 4) |
|
23 |
(5; 8) |
(7; 0) |
(2; 5) |
(7; 3) |
(10; 6) |
|
24 |
(0; 10) |
(5; 3) |
(0; 6) |
(10; 6) |
(5; 10) |
|
25 |
(0; 10) |
(6; 0) |
(0; 6) |
(6; 6) |
(10; 10) |
|
26 |
(0; 10) |
(3; 3) |
(5; 7) |
(7; 1) |
(10; 3) |
|
27 |
(0; 10) |
(3; 5) |
(3; 10) |
(5; 3) |
(10; 0) |
|
28 |
(2; 5) |
(3; 0) |
(4; 10) |
(6; 5) |
(9; 2) |
|
29 |
(2; 5) |
(3; 3) |
(7; 5) |
(7; 0) |
(9; 8) |
|
30 |
(2; 5) |
(0; 4) |
(7; 3) |
(3; 0) |
(8; 0) |
Для справки:
Расстояние между точками А(xA; yA) и В(xB; yB):
![]() ;
;
Таблица 6
Данные к заданию 3
|
Группа |
|
t1, c |
(t), с-1 |
k(t) |
|
1 |
10˚ |
1 |
|
|
|
2 |
40˚ |
12 |
|
|
|
3 |
70˚ |
13 |
|
|
|
4 |
100˚ |
12 |
|
|
|
5 |
130˚ |
1 |
|
|
|
6 |
160˚ |
12 |
|
|
Уравнение прямой, проходящей через точки А(xA ; yA) и В(xB ; yB):
![]() .
.
Определение точки
 пересечения двух прямых, заданных
уравнениями
пересечения двух прямых, заданных
уравнениями
 и
и
 :
:
![]() ,
, ![]() .
.
Угол между двумя прямыми
 и
и
 :
:
![]() .
.
Уравнение прямой, проходящей через заданную точку D(xD ; yD), перпендикулярно прямой
 :
:
![]() .
.
Расстояние от точки P(xP ; yP) до прямой
 :
:
![]() .
.
Для нахождения ускорения точки Bи углового ускорения звенаABнеобходимо сделать новый рисунок, начертив на нем только те звенья механизма, которым принадлежат узлыАиВ (рис. 10).
Теорему об ускорениях точек плоской фигуры необходимо записать в виде
![]() .
.
Если это
равенство спроецировать на две оси x'иy', одна из
которых направлена вдольАВ, а другая
ей перпендикулярна, то получим два
алгебраических уравнения для нахождения
![]() и
и
![]() :
:
![]() ;
;
![]() .
.
Длины векторов
![]() ,
,
![]() ,
,
![]() и
и
![]() ,
если они отличны от нуля, находятся по
формулам
,
если они отличны от нуля, находятся по
формулам
![]() ;
;![]() ;
;
![]() ;
;![]() .
.
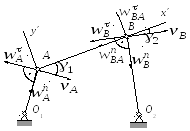
Рис. 10
Решив
полученную систему уравнений относительно
![]() и
и
![]() ,
можно найти
,
можно найти
![]() ;
;![]() ;
;![]() .
.
Пример
Дано:O1
(0;0),O2
(11;3),А (3;0),В
(9;6),С (5;4),D
(2;8),α = 90˚,
![]() с,
с,
![]() .
.
Определить:
скорости точек A, B, Cи D;
угловые скорости
 ,
,
 ,
,
 ;
;угловое ускорение
 и ускорения точекA
и B.
и ускорения точекA
и B.
Решение
1. Строим положение механизма в соответствии с координатами шарниров и направляющим угломползунаD(рис. 11,a). Найдём длины стержней многозвенного механизма, см:
O1A
= 3;![]() ;
;![]() .
.
 а б
а б
Рис. 11
2. Определяем
скорости точек звеньев механизма (A,B,C,D). При
![]() с угловая скорость
с угловая скорость
![]() с-1. Скорость точкиAв заданный момент времени, смс:
с-1. Скорость точкиAв заданный момент времени, смс:
![]() ,
причём вектор
,
причём вектор
![]() и направлен в сторону поворота стержня
и направлен в сторону поворота стержня![]() (рис.
11,б). Направление скорости
(рис.
11,б). Направление скорости
![]() определим, учитывая, что точкаВпринадлежит стержню
определим, учитывая, что точкаВпринадлежит стержню
![]() ,
вращающемуся вокруг
,
вращающемуся вокруг
![]() ,
следовательно,
,
следовательно,
![]() .
Для нахождения значений скоростей точекВиСпостроим МЦС пластиныABC – точкуР1,
лежащую на пересечении перпендикуляров
к
.
Для нахождения значений скоростей точекВиСпостроим МЦС пластиныABC – точкуР1,
лежащую на пересечении перпендикуляров
к
![]() и
и
![]() ,
проведенных соответственно из точекАиВ. КоординатыP1(13;0), необходимо определить геометрически,
найдя точку пересечения прямыхО1А
иВО2на чертеже (рис. 11,б),
и аналитически как пересечение двух
прямыхAP1иBP1.
По направлению вектора
,
проведенных соответственно из точекАиВ. КоординатыP1(13;0), необходимо определить геометрически,
найдя точку пересечения прямыхО1А
иВО2на чертеже (рис. 11,б),
и аналитически как пересечение двух
прямыхAP1иBP1.
По направлению вектора
![]() определяем направление мгновенного
поворота пластиныABCвокругР1. Векторы
определяем направление мгновенного
поворота пластиныABCвокругР1. Векторы
![]() и
и
![]() перпендикулярны отрезкам P1ВиP1С,
соединяющим точкиВ иСс точкой
P1, и направлены
в сторону поворота пластиныABC.Значения
перпендикулярны отрезкам P1ВиP1С,
соединяющим точкиВ иСс точкой
P1, и направлены
в сторону поворота пластиныABC.Значения![]() и
и
![]() ,
смс, найдем из
пропорции
,
смс, найдем из
пропорции
![]() ,
,
вычислив расстояния, см:
P1A
=10,P1B
=![]() иP1С=
иP1С=![]() :
:
![]() ;
;
![]() ;
;
![]() с -1;
с -1;![]() с -1.
с -1.
Аналогичным образом определяем
направление и значение скорости ползуна
D. С учетом того, что
вектор
![]() направлен параллельно направляющим
ползуна, находим МСЦ стержняCD:
точкаР2 (-3;8)
находится на пересечении перпендикуляров
к направлениям скоростей
направлен параллельно направляющим
ползуна, находим МСЦ стержняCD:
точкаР2 (-3;8)
находится на пересечении перпендикуляров
к направлениям скоростей
![]() и
и
![]() ,
то есть прямойP1C
и прямой, проходящей через точкуDперпендикулярно направляющей ползуна.
Угловая скорость стержняCD
,
то есть прямойP1C
и прямой, проходящей через точкуDперпендикулярно направляющей ползуна.
Угловая скорость стержняCD
![]() ,
,
где отрезки P2C иP2D, см, несложно найти по известным координатам их концов:
P2C=![]() ;P2D
= 5.
;P2D
= 5.
Отсюда значения скорости точки D, смс, и угловой скорости звенаCD, с-1:
![]() ;
;![]() .
.
3. Определяем
ускорения
![]() ,
,
![]() .
Вначале найдем
.
Вначале найдем
![]() .
Для этого вычислим угловое ускорение
звенаO1A,
с-2:
.
Для этого вычислим угловое ускорение
звенаO1A,
с-2:
![]() .
.
Отрицательное
значение алгебраического углового
ускорения
![]() указывает на то, что вектор
указывает на то, что вектор
![]() имеет направление, противоположное
имеет направление, противоположное
![]() .
.
Далее находим касательное, нормальное и полное ускорения точки А, смс2:
![]() ;
;
![]() ;
;
![]() .
.
Для определения ускорения точки Взапишем теорему об ускорениях точек плоской фигуры
![]() .
.
Длины векторов, смс2, определяем по формулам
![]() ;
;![]() ;
;
![]() ;
;![]() .
.
Предполагая
![]() ,
,
![]() положительными, изобразим на рис. 12 эти
векторы. Спроецируем векторное равенство
на оси
положительными, изобразим на рис. 12 эти
векторы. Спроецируем векторное равенство
на оси
![]() и
и
![]() ,
первая из которых направлена вдольAB,
а другая ей перпендикулярна. Получим
два алгебраических уравнения для
нахождения
,
первая из которых направлена вдольAB,
а другая ей перпендикулярна. Получим
два алгебраических уравнения для
нахождения
![]() и
и
![]() ,
смс2:
,
смс2:
![]() ;
;
![]() .
.
Определим
значения углов
![]() и
и
![]() ,
град:
,
град:
![]() ;
;
![]() ,
,
где
 .
Отсюда
.
Отсюда
![]() .
.

Далее, разрешая систему уравнений, найдем:
![]() ;
;![]() с -2,
с -2,
![]() ;
;![]() с –2,
с –2,
после чего
можно найти
![]() .
.
Ответ:
1)
![]() см/с,
см/с,![]() см/с;
см/с;![]() см/с;
см/с;![]() см/с;
см/с;
2)
![]() с-1,
с-1,
![]() c-1,
c-1,
![]() c-1;
c-1;
3)
![]() c-2;
c-2;
4)
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.