

Вопрос 18. Основные теоремы статики.
Пусть дана произвольная система сил (F1, F2,..., Fn). Сумму этих сил F=åFk называют главным вектором системы сил. Сумму моментов сил относительно какого-либо полюса называют главным моментом рассматриваемой системы сил относительно этого полюса.
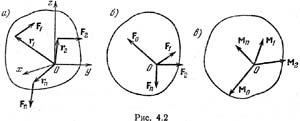
Осн теор статики (теорема Пуансо): Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения. Пусть О — центр приведения, принимаемый за начало координат, r1,r2, r3,…, rn–соответствующие радиусы-векторы точек приложения сил F1, F2, F3, ...,Fn, составляющих данную систему сил (рис. 4.2, а). Перенесем силы F1, Fa, F3, ..., Fn в точку О. Сложим эти силы как сходящиеся; получим одну силу: Fо=F1+F2+…+Fn=åFk, которая равна главному вектору (рис. 4.2, б). Но при последовательном переносе сил F1, F2,..., Fn в точку О мы получаем каждый раз соответствующую пару сил (F1, F”1), (F2,F”2),...,(Fn, F"n).Моменты этих пар соответственно равны моментам данных сил относительно точки О: М1=М(F1,F”1)=r1 x F1=Мо(F1), М2=М(F2, F”2)=r2 x F2=Мо(F2), …, Мп=М(Fn, F"n)=rn x Fn=Мо(Fn). На основании правила приведения системы пар к простейшему виду все указанные пары можно заменить одной парой. Ее момент равен сумме моментов всех сил системы относительно точки О, т. е. равен главному моменту, так как согласно формулам (3.18) и (4.1) имеем (рис. 4.2, в) М0=М1+М2+...+Мn=Мо(F1)+Мо(F2)+…+ Мо(Fn)==åМо(Fk)=årk x Fk. Систему сил, как угодно расположенных в пространстве, можно в произвольно выбранном центре приведения заменить силой Fo=åFk(4.2) и парой сил с моментом M0=åM0(Fk)=årk x Fk. (4.3). В технике очень часто проще задать не силу или пару, а их моменты. Например, в характеристику электромотора входит не сила, с которой статор действует на ротор, а вращающий момент.
ЛИБО
ДРУГОЙ ВАРИАНТ ОТВЕТА:
Лемма. Не изменяя действия силы на твердое тело, ее можно переносить параллельно самой себе в любую точку тела, добавляя при этом пару, момент которой равен моменту данной силы относительно новой точки приложения.
Доказательство. Пусть к телу в точке ![]() приложена сила (рис.
4.1). Добавим в точке
приложена сила (рис.
4.1). Добавим в точке ![]() уравновешенную
систему сил:
уравновешенную
систему сил: ![]() ,
, ![]() . Тогда
. Тогда ![]() , но
, но ![]() −
пара сил с моментом
−
пара сил с моментом  .
.
Пусть на твердое тело действует произвольная система сил. Введем определения.
Главным вектором системы сил называется геометрическая сумма всех сил системы
 .
.
Главный вектор определяется своими проекциями на оси координат:



 Главным
моментом системы
сил относительно данного центра
называется сумма моментов всех сил
системы относительно этого центра:
Главным
моментом системы
сил относительно данного центра
называется сумма моментов всех сил
системы относительно этого центра:
![]() .Главный
момент определяется своими проекциями
на оси координат:
.Главный
момент определяется своими проекциями
на оси координат:
 ,
, ![]() ,
, ![]() ,
,
 .
.
Теорема Пуансо. Произвольную систему сил, действующую на твердое тело, можно заменить эквивалентной системой, состоящей из силы и пары сил. Сила равна главному вектору системы сил и приложена в произвольно выбранной точке (центре приведения), момент пары равен главному моменту системы сил относительно этой точки.
Доказательство.
Пусть точка ![]() −
центр приведения. Пользуясь доказанной
леммой, перенесем
силу
−
центр приведения. Пользуясь доказанной
леммой, перенесем
силу ![]() в
точку
в
точку ![]() ,
добавляя при этом пару с моментом
,
добавляя при этом пару с моментом ![]() (рис.
4.2):
(рис.
4.2): ![]() ,
, ![]() . Аналогично
перенесем в точку
. Аналогично
перенесем в точку ![]() остальные
силы. В результате получим систему
сходящихся в точке
остальные
силы. В результате получим систему
сходящихся в точке ![]() сил
(рис. 4.3)
сил
(рис. 4.3) ![]() ,
, ![]() и
систему пар сил с моментами
и
систему пар сил с моментами ![]() ,
, ![]() . По
теореме о существовании равнодействующей
системы сходящихся сил
их можно заменить одной силой
. По
теореме о существовании равнодействующей
системы сходящихся сил
их можно заменить одной силой  , равной
главному вектору. Систему пар по теореме
о сложении пар можно заменить одной
парой, момент которой равен главному
моменту (рис. 4.4)
, равной
главному вектору. Систему пар по теореме
о сложении пар можно заменить одной
парой, момент которой равен главному
моменту (рис. 4.4)  .
.
Из основной теоремы статики вытекает условие равновесия произвольной пространственной системы сил.
Для равновесия произвольной пространственной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю:
 ,
, ![]() .
.
Проектируя эти равенства на оси координат, получаем условие равновесия в аналитической форме.
Для равновесия произвольной пространственной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси и суммы моментов всех сил относительно этих осей были равны нулю:
 ,
,
 ,
, 
