

1.2.3 В) Электрические уровнемеры
По принципу действия делятся на емкостные (измерители и сигнализаторы уровня) и омические (сигнализаторы уровня)

Емкостные уровнемеры
1 - металлический корпус
2 - электрод (металлический стержень)
3 - защитная пленка
4 - измерительная схема
5 - вторичный прибор
Металлический
корпус и электрод образуют цилиндрический
конденсатор, его электроемкость
![]()
Электроемкость конденсатора пропорциональна уровню жидкости в резервуаре. Для измерения электроемкости используется схема 4, при этом электроемкость измеряется двумя методами:
- Резонансный, параллельно емкости включается катушка, образуется колебательный контур, который настраивают на резонансную частоту при некотором уровне С (емкости h). Если h изменяется, то изменяется С, происходит срыв резонансных колебаний, нарушение резонанса фиксируется вторичным прибором.
- Электронные сигнализаторы уровня. Конденсатор включается в одно из плеч мостовой схемы, при изменении уровня меняется емкость С, изменяется напряжение измерительной диагонали данной мостовой схемы. Напряжение измеряется вторичным прибором 5, который градуируется в единицах уровня (уровнемер) ЭИВ электронноизмеритель высоты.
При измерении уровня электропроводных сред электрод 2 покрывается изолирующими материалами. При измерении уровня агрессивных сред электрод выполняется из каррозионностойкого материала или покрывается пленкой.

Омические уравнемеры
Т – трансформатор
К – реле
К1 включена в цепь вторичной обмотки трансформатора
В цепь контактов реле включена лампочка L.
К3 катушки магнитного пускателя.
1- резервуар, 2- Блок электродов,
3-изолирующая колодка.
Среда в резервуарах
электропроводная
![]() =2.103См/м.
=2.103См/м.
Принцип действия: при достижении уровня электродов жидкостью, цепь замыкается, реле срабатывает, загорается лампочка, включается К3 и выключается насос. Данные уровнемеры – сигнализаторы уровня. (ЭРСУ-М)
1.2.3. Г) Радиоизотопные уровнемеры
Они применяются в закрытых резервуарах под давлением с жидкостями, сыпучими минералами.
Принцип действия основан на изменении интенсивности γ - излучения при прохождении через слой вещества толщиной x и плотностью ρ.
![]()
![]() -
коэффициент поглощения веществом γ –
излучения. Источник излучения Со - 60, Сs
- 137. ρ=const,
-
коэффициент поглощения веществом γ –
излучения. Источник излучения Со - 60, Сs
- 137. ρ=const,
![]()
![]() x.
x.

2 1-источник
2-приёмник
Рис.1 Рис.2 Рис.3
Пример 1: сигнализатор уровня
Пример 2: сигнализатор
уровня
![]()
![]() x.
x.
Пример 3: когда можно поместить ρ. в виде поплавка тоже измеритель уровня.
1.2.3 Д) Акустические уровнемеры «Эхо-5»
Нужны для измерения
уровня различных сред, в том числе
вязких, дестабилизирующих, имеющих
осадки, в том числе взрывоопасных сред,
а также сыпучих и кусковых материалов
![]() от 2 до 10 мм. При этом осуществляется
бесконтактное дистанционное управление
уровнем данных сред.
от 2 до 10 мм. При этом осуществляется
бесконтактное дистанционное управление
уровнем данных сред.
Принцип действия акустических уровнемеров основан на локации сред газовых, воздушных, находящихся над контролируемыми средами и отражениями от поверхности раздела (газ – контролируемая среда).
Мера измерения уровня является время прохождения ультразвуковыми импульсами от источника до границы раздела: газ– контролируемая среда и отраженных импульсов от приёмника.
Данный прибор выполнен в 2-х модификациях:
- для нормальных сред(ЭХО-3, ЭХО-5)
- безопасное исполнение(ЭХО 3В, 5В)
Данный уровнемер состоит из 3-х частей:
1.Акустический преобразующий тип АП.
2.Преобразователь, передающий измерительный тип ППИ-5. АП выпускается в пяти модификациях АП-3, АП-4 – применяются для измерения уровней со взрывоопасными средами. АП-6 – для измерения уровней сильновспенивающихся жидкостей. АП и ППИ соединены между собой кабелем связи. Структурная схема акустического уровнемера имеет вид:
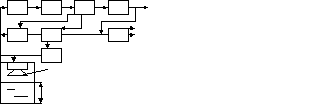
3 4 5 6 измерение
2 7 9 сигнализация
8
1
Н
1. Акустический преобразователь, встроенный в ёмкость. 2. Генератор вырабатывает электрические импульсы определенной частоты, которые поступают в акустический преобразователь 1, где преобразуются в ультразвуковые импульсы, которые отражаются от границы раздела, газ – контролируемая среда, поступает обратно в акустический преобразователь и в нём осуществляется обратное преобразование ультразвуковых сигналов в электрические импульсы; эти импульсы усиливаются в усилителе 3 и далее они поступают в накопительное устройство 4, в котором осуществляется отделение полезных сигналов или импульсов от разных помех, а также накопление и сумма данных импульсов за 16 периодов тактовой частоты генератора-2.
Формирование электрического унифицированного сигнала (0-5 мА) производится в компенсационном преобразователе, который состоит из схемы сравнения 5, усилителя преобразовательного устройства 6 и элемента обратной связи 7. Для уменьшения погрешности связанной с изменением температуры среды в резервуаре применяются термокомпенсационное устройство 8. Для исключения влияния на показания прибора различных высокочастотных помех применяются специальные компенсационные устройства находящиеся в блоке . С выхода блока 6 снимается сигнал пропорциональный замеренному уровню: Блок 9 нужен для выдачи сигнала по линейному и максимальному уровню среды в резервуаре. Достоинства: универсальность, высокая надежность для различных сред.