

2.4.3. Регуляторы непрерывного действия
В АСР при наличии на входе регулятора ∆ φ. Эти регуляторы вырабатывают непрерывно регулирующее воздействие μ, кот. пост. на объект регулирования.
Д иаграмма
иаграмма
Работа любого АСР включает регуляторы, характеризующиеся динамическими свойствами объекта регулирования и законом регулирования, который вырабатывается данным регулятором. Зависимость выходной величины регулятора (μ) от входной величины регулятора (∆φ) функции времени.
μ=f (∆φ,t). Регуляторы непрерывного действия: 1) статические (пропорциональные, П - регуляторы); 2) астатические (интегральные, И - регуляторы); 3) статические регуляторы с предварением (пропорционально-дифференциальные ПД - регуляторы); 4) изодромные с предварением (пропорционально-интегрально-дифференциальные, ПИД - регуляторы); 5) изодромные (пропорционально-интегральные, ПИ - регуляторы).
2.4.3 А) Статические регуляторы
Статическое регулирование – при котором каждому положению регулирующего органа соответствует определенное значение регулируемой величины в статическом режиме, зависящее от величины нагрузки, действующей на объект регулирования. График статического режима изменения регулируемой величины нагрузки, действующей на объект (притока, стока)

Q – нагрузка (приток, сток)
φ1уст., φ2 уст. – статическая ошибка – отклонение регулируемой величины от φ0 в статическом, установленном режиме. В простейшем случае μ=f(∆φ). При этом данная зависимость μ=kp∆φ
kp – коэффициент усиления регулятора kp=const, поэтому регуляторы пропорциональные
Динамическая характеристика
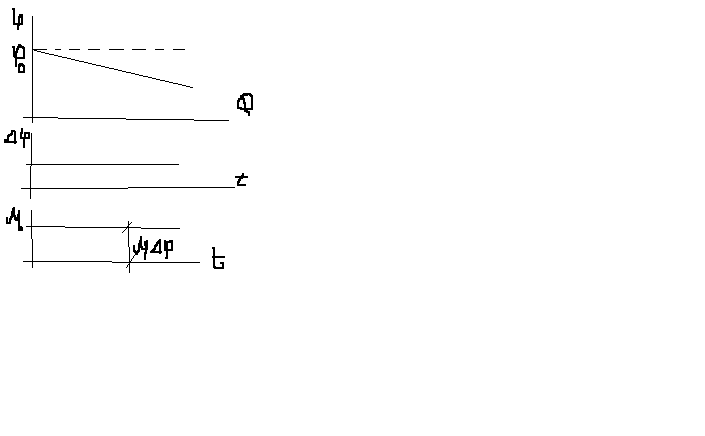
Из графика - и мгновенное изменяется при появлении ∆φ без запаздывания и воздействует на объект регулирования.
При этом сокращается время перехода процесса АСР, т.е. сокращается время регулирования данного параметра.
Достоинства регулятора: 1. хорошие динамические свойства. Недостатки: плохие статические свойства (наличие статической ошибки – статизм), регулирующая: φст.=1/ kp, ее можно понижать, увеличив kp).
Область применения: для регулирования объектов, допускающих статическую ошибку регулирования и подверженных небольшим и редким возмущениям.
2.4.3 Б) Астатические регуляторы (интегральные)

Астатическое регулирование – при котором объект регулирования, в установленном режиме поддерживается заданное значение регулируемой величины, независимо от нагрузки, действующей на объект регулирования. Статическая характеристика данного регулирования:
Закон регулироания:μ=(1/Tим)∫∆φdt
Tим – параметр настройки данных регулятором (время полного хода исполнительного механизма под действием регулятора при максимальной нагрузке, действующей на объект регулирования, принимаем ∆φ=константа) μ=∆φ*t/Tим.
Достоинства: отсутствие статической ошибки (поддерживает φ0 на заданном уровне). Недостаток: плохие динамические свойства (при появлении ∆φ, величина μ изменяется от 0 с постоянной скоростью медленнее, чем для П – регулятора – это увеличение времени переходного процесса в АСР – увеличение времени регулирования). Данный регулятор не применяется для регулирования астатических объектов, т.к. работа АСР в данном случае будет неустойчива.