

1.1 Функции и характеристики элементов автоматических устройств
Каждая АС состоит из отдельных элементов, выполняющих определенную функцию. Каждый элемент воспринимает сигнал, поступающий от предыдущих элементов осуществляют количественное и качественное преобразование сигнала и передает его другому, т.е. каждый элемент является преобразователем некоторого входного сигнала У в выходной сигнал Х.
Схема данного элемента имеет следующий вид:

Осуществляется преобразование за счет Е входного сигнала. Пример: термометр сопротивления, термопара и др.
Существуют элементы, на которые подается сигнал от дополнительных источников Е. Схема элементов имеет следующий вид.

Z - сигнал от элемента или пневматического устройства;
X - управляет передачей E от Z к Y.
Пример: усилители, реле и т.д.
По назначению все элементы автоматический устройств делятся на следующие виды:
- датчики
- реле
- усилители
- исполнительные механизмы
- автоматические регуляторы
- регулирующие органы (вентили, краны)
- элементы дистанционных передач (электрические и пневмотические преобразователи)
Основными характеристиками каждого элемента являются величины входного сигнала Х и выходного сигнала У. Y/X - статический передаточный коэффициент (S)
![]() -
динамический передаточный коэффициент
-
динамический передаточный коэффициент
![]() -
относительный динамический передаточный
коэффициент
-
относительный динамический передаточный
коэффициент
S и
![]() называются по-разному: для датчиков это
чувствительность, а для усилителей –
коэффициент усиления.
называются по-разному: для датчиков это
чувствительность, а для усилителей –
коэффициент усиления.
При работе каждого
элемента возникает погрешность, которая
заключается в отклонении фактического
значения выходной величины
![]() от его расчетного значения
от его расчетного значения![]() .
Эта погрешность связана с износом
материала элемента, с отклонением
.
Эта погрешность связана с износом
материала элемента, с отклонением![]() питающей сети от номинального, а также
с изменением условий окружающей среды.
питающей сети от номинального, а также
с изменением условий окружающей среды.
Различают следующие виды погрешности:
1. Абсолютная - это
разность:
![]()
2. Относительная
![]()
3. Относительная
приведенная
![]() -
она называется еще и класс точности
прибора, как правило он указывается на
шкалах всех приборов.
-
она называется еще и класс точности
прибора, как правило он указывается на
шкалах всех приборов.
1.2 Датчики, основные показатели и характеристики
Датчик - устройство, осуществляющее функцию преобразования физической величины одного рода в физическую величину другого рода, удобную для передачи другим элементам и на усиление.
Основные характеристики:
1. Статическая характеристика y=f(x)
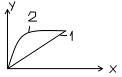
1 - линейная
характеристика, поэтому чувствительность
![]() будет постоянной для всего диапазона
х.
будет постоянной для всего диапазона
х.
2 - нелинейная, поэтому чувствительность будет различной и зависит от крутизны данной характеристики.
Датчики, статическая
характеристика которого непрерывна
называются датчиками непрерывного
действия или функциональными. Если
статическая характеристика описывается
следующей функцией
![]() ,
где k=const, то такой датчик называется
линейным. Если статическая характеристика
датчика имеет разрывный характер вида
y=0 при 0<x<a,
y=y1
при x>a, то
датчик называется релейным.
,
где k=const, то такой датчик называется
линейным. Если статическая характеристика
датчика имеет разрывный характер вида
y=0 при 0<x<a,
y=y1
при x>a, то
датчик называется релейным.

1 - Динамическая характеристика - зависимость y от времени при скачкообразном изменении входной величины x.
y=f(t) при x=const


1 – экспонинциальные.
2 - колебательный затухающий процесс.
По виду выходной величины сигнала у датчики делятся на:
- омические
- термоэлектрические
- емкостные
- индуктивные
- трансформаторные
По измеряемым технологическим параметрам:
- температуры
- давления
- расхода
- уровня
- плотности
- влажности и т.д.