

3.3.2 Параллельное соединение звеньев
W1(P)

 У1(Р)
У1(Р)






 Х1(Р) W(Р)
Х1(Р) W(Р)
W2(P)
Wn(P)

 Х
Х 2(Р)У2(Р) У(Р)
2(Р)У2(Р) У(Р)



Х
 n(Р) Уn(Р)
n(Р) Уn(Р)

Рис2
Входной сигнал системы равен входному сигналу всех элементов.
Х(Р) = Х1(Р)= Х3(Р)= Хn(Р)
Выходные сигналы АСР равен сумме входных сигналов его элементов:
У1(Р)= W1(Р)* Х(Р)
У2(Р)= W2(Р)* Х(Р)
Уn(Р)= Wn(Р)* Х(Р)
У(Р)=У1(Р)+ У2(Р)+ У3(Р)+ +Уn(Р) (3.1)
В формулу 3.1 подставим получен. ранее выходных сигналов каждого элемента
У(Р)= W1(Р)* Х(Р)+ W2(Р)* Х(Р)+ ..+ Wn(Р)* Х(Р)
У(Р)/Х(Р)= W1(Р)+ W2(Р)+…+ Wn(Р)= W(Р)
Передаточная функция АСР состоящая из n параллельно соединенных звеньев равна сумме передаточных функций отдельных ее звеньев.
3.3.3 Соединение звеньев по принципу обратной связи
Схема замкнутого АСР приведена на рис.3
Х
W1(P)



 (Р) Х1 У(Р)
(Р) Х1 У(Р)









Хос(Р) W(P)
 +1
+1
Рис.3
W1(P) м.б. последовательное соединение различных звеньев, параллельное и т.д.В любом замкнутом АСР сигнал с ее выхода по каналу обратной связи поступает на ее вход. Если по направлению данный сигнал обр. связи Хос(Р) совпадает с основным Х(Р), то такая связь называется положительной. В этом случае результирующий сигнал системы Х1(Р) равен сумме данных сигналов, т.е
Х1(Р)= Х(Р)+ Хос(Р)
Положительные обратные связи применяются только в качестве внутренних обратных связей, охватывающих только
Если сигнал обратной связи Хос(Р) направлен противоположно основному сигналу Х(Р) то такая обратная связь называется отрицательной.(рис.4)
Х
W1(P)



 (Р) Х1 У(Р)
(Р) Х1 У(Р)









Хос(Р) W(P)
 -1
-1
Рис.4
Суммарный сигнал Х1(Р) равен разности основного сигнала Х(Р) и Хос(Р)
Х1(Р)= Х(Р)- Хос(Р)
Для вывода передаточной функции рассмотрим вариант, когда в цепь включено звено с передаточной функцией W2(P).(рис.5)
Х
W1(P)



 (Р) Х1 У(Р)
(Р) Х1 У(Р)








Хос(Р) W(P)
W2(P)



Рис.5
Выходной сигнал У(Х) относительно передаточной функции W1(P),а входной – Х1(Р).
У(Р)= W1(Р)* Х1(Р)
Х1(Р)= Х(Р)- Хос(Р)
Хос(Р)= W2(Р)*У(Р)
У(Р)= W1(Р)[ Х(Р)- Хос(Р)]= W1(Р)[ Х(Р)- W2(Р)*У(Р)]
У(Р) + W1(Р) *У(Р) W2(Р)= W1(Р)* Х(Р)
W(Р)= У(Р)/Х(Р)= W1(Р)/1+ W1(Р)* W2(Р)
Для положительной обратной связи :
W(Р)= У(Р)/Х(Р)= W1(Р)/1- W1(Р)* W2(Р)
Для АСР изображенном на рис.3 W2(Р)=1, поэтому передаточная функция им.вид:
W(Р)= W1(Р)/1– W1(Р)
Для рис.4:
W(Р)= W1(Р)/1+ W1(Р)
3.4 Анализ точности аср
При определении точности АСР находят значение статической ошибки работы АСР (Δу).
Пример: определим статическую погрешность АСР, состоящей из последовательно – соединенных звеньев (безинерционного, инерционного, колебательно–затухающего), охваченных отрицательной обратной связью:
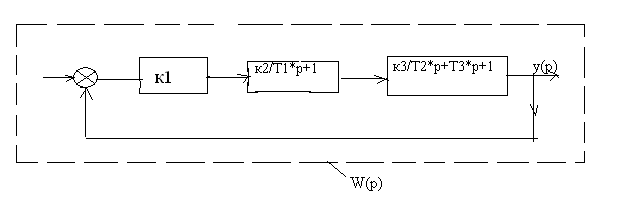
Получим придаточную функцию данного АСР:
W(р)=![]() ,
,
Преобразуем:
W(р)=![]() ,
Рассмотрим статический режим, приняв
р=0 (оператор):
,
Рассмотрим статический режим, приняв
р=0 (оператор):
W(р)=у
установится ≥![]() ,
Введем обозначения: к0=к1*к2*к3 – общ
коэффициент усиления АСР, у
установ-ся=к0/1+к0=1 –
,
Введем обозначения: к0=к1*к2*к3 – общ
коэффициент усиления АСР, у
установ-ся=к0/1+к0=1 –![]() ,
В данном случае принимаем задан значение
выходной величины у=1, у задан =1. Статическая
погрешность Δу определяется:
,
В данном случае принимаем задан значение
выходной величины у=1, у задан =1. Статическая
погрешность Δу определяется:
Δу=у задан – установится, Δу=1/1+к0 – статическая ошибка работы АСР. Ее можно уменьшить, увеличив…
3.5 Устойчивость аср
Чтобы АСР нормально работала она должна быть устойчивая. Устойчивость АСР – способность возвращаться к установившемуся положению (установленное значение регулируемой величины после прекращения действия возмущения которое вывело её из данного установившегося положения). Для оценки устойчивости работы АСР применяют
1) Алгебраический критерий Гурвиц и Раус.
2)Частотные критерии Найквиста и Михайлова
Критерий Гурвица –основан на анализе неравенств состоящих из коэффициентов уравнения АСР. Характеристическое уравнение n-порядка
![]()
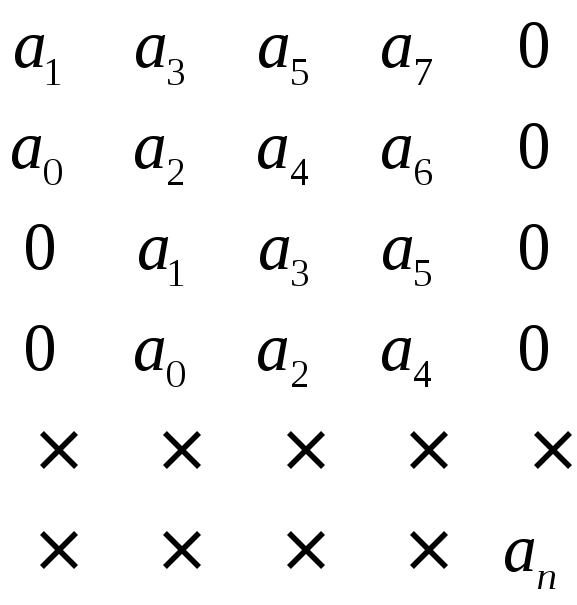
Оценка устойчивости АСР n-порядка по критерию Гурвица производится:
составляется из
коэффициентов характеристического
уравнения Таблица Гурвица – по главной
диагонали выписываются ![]()
![]() ;строка таблицы с
нечетным и чётными индексами чередуются;
число элементов каждой строки = n,
недостающие коэффициенты заполняются
нулями; отчеркивая строки и столбцы
получают n
определителей Гурвица. АСР n-порядка
является устойчивой если все
;строка таблицы с
нечетным и чётными индексами чередуются;
число элементов каждой строки = n,
недостающие коэффициенты заполняются
нулями; отчеркивая строки и столбцы
получают n
определителей Гурвица. АСР n-порядка
является устойчивой если все ![]() (
(![]() )
.Устойчивость АСР
оценивается по 2-м условиям 1) - Необходимо
положительно всех коэффициентов
характеристического уравнения
)
.Устойчивость АСР
оценивается по 2-м условиям 1) - Необходимо
положительно всех коэффициентов
характеристического уравнения ![]() 2) – Достаточным
является выполнение неравенств для
определённого порядка АСР
2) – Достаточным
является выполнение неравенств для
определённого порядка АСР
![]()
![]()
Условия получения положительного определителя Гурвица:
АСР 2-го порядка
1.![]() Достаточное условие устойчивости АСР
является положительность коэффициентов
характеристического уравнения. АСР
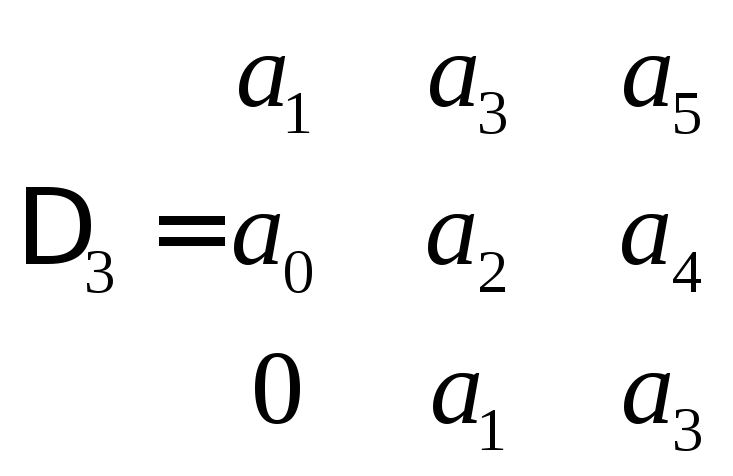
3-го n=3
Достаточное условие устойчивости АСР
является положительность коэффициентов
характеристического уравнения. АСР
3-го n=3
![]() достаточное условие
достаточное условие ![]() . АСР 4-го n=4
. АСР 4-го n=4
![]() достаточное условие
достаточное условие
![]()