

3.2.6 Колебательное затухающее звено, апериодическое звено 2-го порядка
Это такое звено, у которого при скачкообразном изменении х, выходная величинана – у изменится в колебательном режиме с постоянным периодом и с амплитудой затухающего колебания по экспоненте. Динамическая характеристика имеет вид:
Т02*d2y/dt2+T*dy/dt+y=к*х. Это уравнение 2-го порядка, звено имеет 2 емкости – Т0 и Т. Для решения уравнения необходимо получить передаточную функцию и характерное уравнение для данного звена. Передаточная функция:
Т02*р02*у(р)+Т*р*у(р)+у(р)=к*х(р)
W(р)=у(р)/х(р)=к/(Т02*р2+Т*р+1). Характерное уравнение (когда знаменатель=0): Т02*р2+Т*р+1=0.
Найдем корни:
Р1,2=-Т/(2*Т02)±![]() (Т2-4Т02/4*Т04).
Данные корни могут быть комплексно-сопряженные
или действительно отрицательные. Если
Т<2Т0, то корень дифференциала уравнения
будет отрицательным и корни
комплексно-сопряженные, т е: Р1,2=-α±j*ω.
Коэффициент затухания α=Т/2Т02,
ω=
(Т2-4Т02/4*Т04).
Данные корни могут быть комплексно-сопряженные
или действительно отрицательные. Если
Т<2Т0, то корень дифференциала уравнения
будет отрицательным и корни
комплексно-сопряженные, т е: Р1,2=-α±j*ω.
Коэффициент затухания α=Т/2Т02,
ω=![]() 4Т02/Т0/4Т04)
– частота вынужденных колебаний выходной
величины у. Решение будет иметь вид: у=у
установится – с*е-αt*sin(ω*t+ψ),
где с, ω – постоянные интегрирования,
которые определяются из начальных
условий, т е: (dy/dt)t=0.
Параметры: у установится = к*х, с=к*х*(ω0/ω),
ω0=1/Т0 – частота свободных колебаний
выходной переменной, ψ=arctg(ω/α).
Подставив все получим:
4Т02/Т0/4Т04)
– частота вынужденных колебаний выходной
величины у. Решение будет иметь вид: у=у
установится – с*е-αt*sin(ω*t+ψ),
где с, ω – постоянные интегрирования,
которые определяются из начальных
условий, т е: (dy/dt)t=0.
Параметры: у установится = к*х, с=к*х*(ω0/ω),
ω0=1/Т0 – частота свободных колебаний
выходной переменной, ψ=arctg(ω/α).
Подставив все получим:
y=кх*[1 - ω0/ω*е-αt*sin(ω*t+arctg ω/α)]. График переходного процессса (х=const):


Пример: двухъемкостные статические объекты, электродвигатели переменного тока (асинхронные).
Апериодическое звено 2-го порядка: Динамическая характеристика данного звена имеет вид:
Т02*d2y/dt2+T*dy/dt+y=к*х.
Характеристическое уравнение данного
звена: Т02*р2+Т*р+1=0.
Соотношение постоянных времени имеет
следующий вид: Т1>2Т0. Корни
характеристического уравнения будут
вещественными и отрицательными:
Р1,2=-α±γ, α=-Т1/2Т0, γ=![]() ((Т12-4Т02)/4Т04).
И решение исходного дифференциального
уравнения имеет вид: у=к*х – с1*е-(α+γ)
– с2*е-( α-γ),
где с1,с2 – постоянная интегрирования.
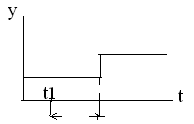
График переходного процесса им s-вид:
((Т12-4Т02)/4Т04).
И решение исходного дифференциального
уравнения имеет вид: у=к*х – с1*е-(α+γ)
– с2*е-( α-γ),
где с1,с2 – постоянная интегрирования.
График переходного процесса им s-вид:


3.2.7 Звено чистого запаздывания
Динамическая его характеристика имеет вид: у=х*(t – τ), где τ – время чистого запаздывания. График переходного процесса:

Характеристика – величина у на выходе звена = вх величине х, но через время τ. Передаточная функция имеет вид: W(р)=у(р)/х(р)=е-р*τ
3.3 Передаточные функции аср
Отношение преобразованной по Лапласу выходной величины АСР (или элемента) к преобразованной по Лапласу входной величины АСР называется передаточной функцией АСР (элемента).
У(Р)/ Х(Р) =(b0*Pm+ b1*Pm-1+…+ bm-1*P+bm)/(a0*Pn+ a1*Pn-1+…+ an-1*P+an) =W(P)
Знаменатель передаточной функции приравнивают к 0, и такая функция называется характеристическое уравнение АСР(или элемента).
Любая АСР состоит из отдельных звеньев, элементов, соединенных по следующим схемам:
1.последовательное соединение элементов
2. параллельное соединение
3. смешанное соединение элементов
4. соединение элементов по схеме обратной связи
Для определения передаточной функции данной АСР необходимо определить передаточные функции вышеуказанных элементов в схеме.
3.3.1 Последовательное соединение звеньев
W1(P)
W2(P)
Wn(P)
Х
 1(Р)
1(Р) 

 ……
……
Х(Р)
Рис.1
W1(P)… Wn(P)-передаточная функция отдельных звеньев.
На входе и выходе – входные и выходные сигналы. Входные сигналы первого звена равны сигналу всей системы.
Х1(Р) = Х(Р)
Вся система обозначена как W(Р). Выходной сигнал всей системы У(Р):
Хn+1(Р)=У(Р)
W(Р)= У(Р)/ Х(Р)
Определяющим выражением передаточной функции для каждого звена является отношение выходного сигнала к входному.
W1(P) =X2(P)/X1(Р); W2(P)=X3(P)/X2(Р)
Wn(P)=Xn+1(P)/Xn(Р)
Перемножим соотношения:
W1(P)* W2(P)* Wn(P)= Xn+1(P)/X1(Р)= У(Р)/ Х(Р) =W(P)
Передаточная функция АСР, состоящая из n последовательно соединенных звеньев равна произведению передаточных функций звеньев.