

2.2 Лабораторная работа № 2
Исследование позиционных динамических звеньев
Цель работы: Математическое моделирование временных характеристик позиционных звеньев. Изучение динамических свойств, частотных характеристик и оценка влияния параметров на свойства звеньев. Ознакомление с системами MATLAB и MathCAD. Применение этих систем для изучения динамических звеньев.
Программа работы
1.Математическое моделирование. Расчётно - экспериментальная часть
-
Ознакомиться с основами моделирования звеньев и систем управления с использованием пакета MATLAB-Simulink
-
По заданию преподавателя определить параметры звеньев и создать их модели
-
Расчёт временных характеристик исследуемых динамических звеньев:
-
Расчёт переходных функций h(t) и импульсных переменных (весовых) функций ω(t) динамических звеньев по методу структурного моделирования;
-
Аналитический расчет временных характеристик. Сравнить результаты расчета с моделированием.
-
Определение показателей переходных процессов исследуемых звеньев.
-
-
Частотных анализ динамических звеньев с использованием пакета matlab-Simulink:
-
Ознакомиться с частотными методами анализа динамических звеньев;
-
Расчёт и построение амплитудно-фазовых частотных характеристик (диаграмма Найквиста), логарифмических амплитудных L(w) и фазовых частотных φ(w) характеристик (диаграмма Бодэ) с использованием пакета MATLAB;
-
Расчёт и построение асимптотических логарифмических частотных характеристик L(w) и φ(w) динамических звеньев, для колебательных звеньев с учетом поправок
-
-
Расчётно-графическая часть. Составление отчета по
лабораторной работе
-
Представить цель и программу работы, содержание расчетно-экспериментальной части
-
Создаются модели динамических звеньев и задаются параметры этих звеньев
-
Приводятся соответствующие графики переходных функций h(t) и весовых функций w(t) рассматриваемых динамических звеньев
-
Производятся аналитический расчет временных характеристик h(t) и w(t) исследуемых звеньев. Сравнить результаты аналитического расчета с моделированием. Определяются показатели переходных процессов звеньев
-
Приводятся результаты частотного анализа для динамических звеньев с использованием пакета MATLAB-Simulink, представляются временные характеристики, логарифмические частотные характеристики и комплексные частотные характеристики.
-
Рассчитываются и строятся асимптотические ЛАЧХ L(w) и ЛФЧХ
 (w)
для заданных звеньев.
(w)
для заданных звеньев.
-
Сделать выводы по работе
-
Порядок выполнения лабораторной работы
-
Предварительно необходимо ознакомиться с краткими сведениями по пакету МATLAB-Simulink, с основами создания моделей и методике компьютерного исследования звеньев. Необходимо также выполнить работу №1, касающуюся работе с этим пакетом.
-
Определение параметров моделей звеньев. Используемые блоки Simulink. ётом ать и построить асимптотические ЛАЧХ и ЛФЧХ исследуемых звеньев (для колебательных звеньев - с
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
По данным задания определить параметры моделей следующих динамических звеньев.
Пропорционального
![]()
Апериодического (инерционного или фильтра)
![]()
Апериодического звена второго порядка
![]()
Колебательного
![]()
При заданных постоянных параметрах k и T рассматриваются три варианта колебательных звеньев с коэффициентами затухания:
![]()
![]()
![]()
Консервативного
![]()
где![]() коэффициент относительного затухания
звена
коэффициент относительного затухания
звена
При заданном постоянном коэффициенте рассматриваются два варианта консервативных звеньев при постоянных времени:
T1=T,
T2=2T.
-
Исследование временных характеристик позиционных динамических звеньев по методу структурного моделирования
Для структурного моделирования используем систему MATLAB, основные методы работы с которой были рассмотрены ранее. Открывается программа MATLAB. В основном окне программы запускается библиотека Simulink. Создаётся новая модель. При создании моделей звеньев используются следующие блоки Simulink
Используемые блоки Simulink:
1. Генератор ступенчатого сигнала Step из раздела Sources - источники сигналов.
Назначение: формирует ступенчатый сигнал(см. Л.р. №1)
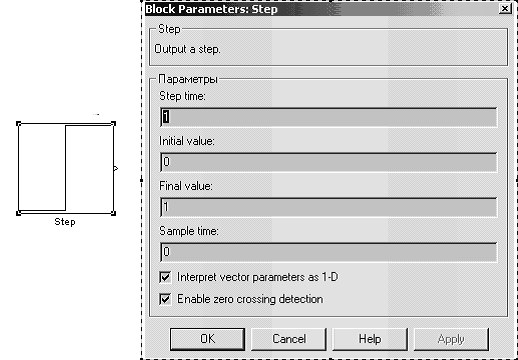
Рис. 2.1. Блок, моделирующий генератор ступенчатого сигнала и
окно редактирования параметров блока
2. Блок передаточной функции Transfer Fcn из раздела Continuous – аналоговые блоки.
Назначение: блок передаточной характеристики Transfer Fcn задает передаточную функцию в виде отношения полиномов(см. Л.р. №1)
3. Осциллограф Scope из раздела Sinks - приемники сигналов
Назначение: строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования (см. основные сведения работы с пакетом Simulink).
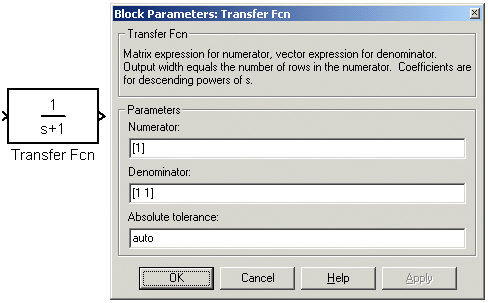
Рис. 2.2. Блок, моделирующий передаточную функцию и окно
редактирования параметров блока
4. Мультиплексор (смеситель) Mux из раздела Signal Routing
Назначение: объединяет входные сигналы в вектор.
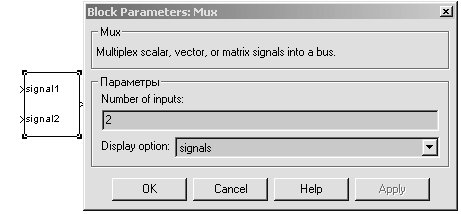
Рис. 2.3. Блок, объединяющий входные сигналы и окно
редактирования параметров блока
Параметры блока:
-
Number of Inputs - Количество входов.
-
Display option - Способ отображения. Выбирается из списка:
-
bar - Вертикальный узкий прямоугольник черного цвета.
-
signals - Прямоугольник с белым фоном и отображением меток входных сигналов.
-
none - Прямоугольник с белым фоном без отображения меток входных сигналов.
Входные сигналы блока могут быть скалярными и (или) векторными. Если среди входных сигналов есть векторы, то количество входов можно задавать как вектор с указанием числа элементов каждого вектора. Например, выражение [2 3 1] определяет три входных сигнала, первый сигнал - вектор из двух элементов, второй сигнал - вектор из трех элементов, и последний сигнал - скаляр. В том случае, если размерность входного вектора не совпадает с указанной в параметре Number of Inputs, то после начала расчета Simulink выдаст сообщение об ошибке. Размерность входного вектора можно задавать как -1 (минус один). В этом случае размерность входного вектора может быть любой. Параметр Number of Inputs можно задавать также в виде списка меток сигналов, например: Vector1, Vector2, Scalar. В этом случае метки сигналов будут отображаться рядом с соответствующими соединительными линиями.
Сигналы, подаваемые на входы блока должны быть одного типа (действительного или комплексного).
5. Генератор сигнала Signal Builder – из раздела Sources – источники сигналов
Назначение: формирует один из трёх видов сигналов
Constant – постоянный;
Step – ступенчатый;
Pulse – пульсирующее воздействие.
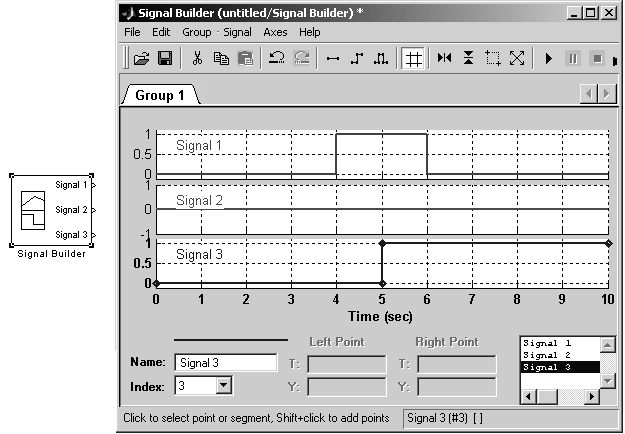
Рис. 2.4. Блок, моделирующий три типа сигналов и окно
редактирования параметров блока
-
Моделирование переходных функций позиционных динамических звеньев
Для моделирования переходных функций используются три типа блоков. Первый – Step формирует единичный импульс. Второй – Transfer Fcn задаёт передаточную функцию звена. Третий – Scope осциллограф, выводящий график переходной функции. Если сигналов несколько, как при колебательном звене, то используется ещё блок - Mux.
Переходные функции h(t) пропорционального и апериодического звеньев
Исследование временных характеристик указанных звеньев может быть проведено в отдельности для каждого звена с использованием моделей отдельных звеньев, либо одновременно с использованием общей модели, представленной на рис. 2.5. Рассматривается второй вариант. При создании модели использовали в качестве примера следующие параметры звеньев: k=5; T=0,1c; Т1=0,1с; Т2=2∙Т2=0,2с. Передаточные функции исследуемых звеньев представлены в п.3.2. Схема объединённой модели звеньев представлены на рис. 2.5.
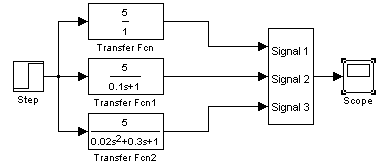
Рис. 2.5. Схема модели для исследования пропорционального
и апериодических звеньев
Параметры блока Step сохраняются при исследовании любых звеньев. Параметры блоков Transfer Fсn и Step даны:
-
для пропорционального звена рис. 2.6
-
для апериодического звена первого порядка на рис. 2.7
-
для инерционного звена второго порядка на рис. 2.8
Выше было рассмотрено моделирование пропорционального и апериодических звеньев. С использованием общей модели указанных звеньев (рис. 2.5) График переходных функций в этом случае будет иметь вид кривых, представленных на рис. 2.9.
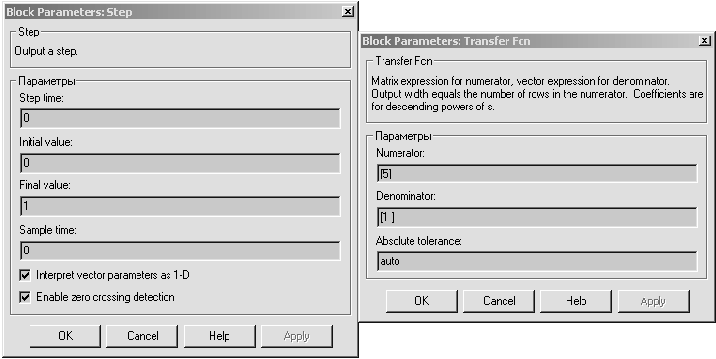
Рис. 2.6. Параметры блоков Step и Transfer Fcn
пропорционального звена
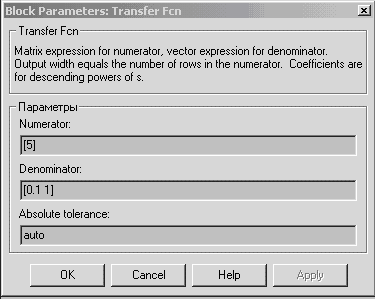
Рис. 2.7. Параметры блока Transfer Fcn инерционного звена
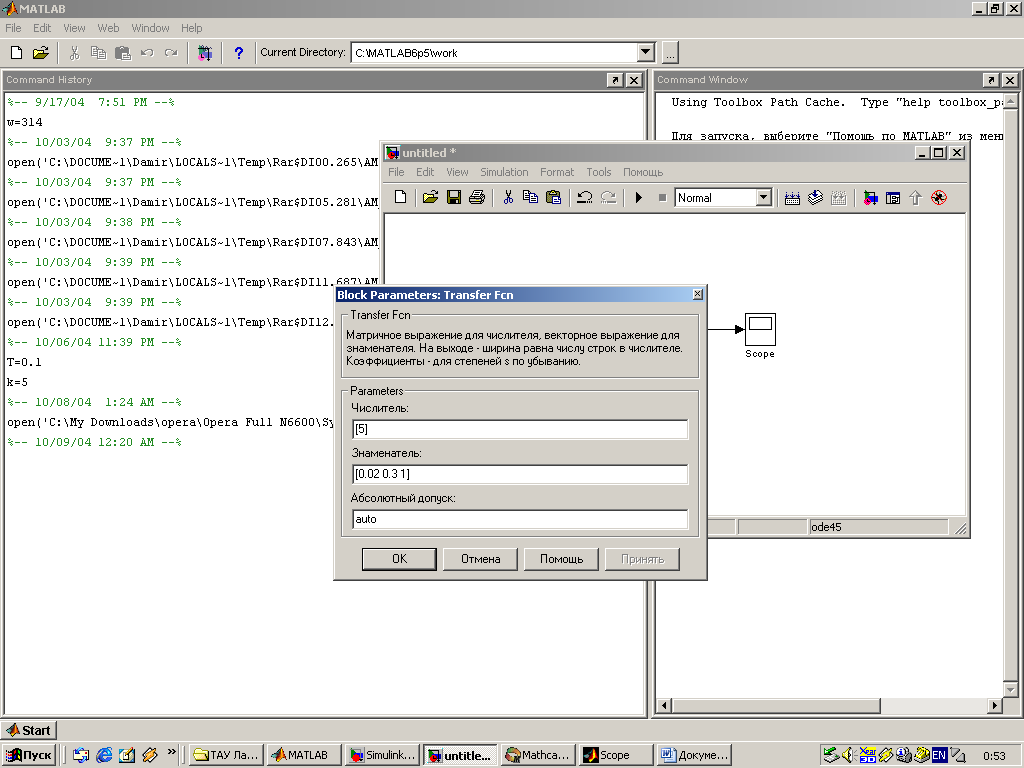
Рис. 2.8. Параметры блока Transfer Fcn апериодического
звена 2-го порядка
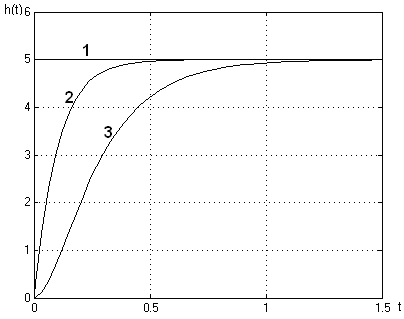
Рис. 2.9. Графики переходных функций пропорциональных
и апериодических звеньев: 1 – пропорциональное звено;
2 – апериодическое звено первого порядка;
3 - апериодическое звено второго порядка
Исследование переходных функций колебательных звеньев.
Переходные
функции колебательного звена находятся
при коэффициентах затухания
![]() и
значениях
и
значениях
![]()
Передаточная функция колебательного звена
![]() ,
,
Схема
модели колебательных звеньев в окне
модели Simulink
представлена на рис. 2.10. с заданными
коэффициентами ξ и
![]()
Окна параметров блоков Transfer Fcn подобны окну в апериодическом звене 2-го порядка.
График переходной функции колебательного звена, полученной на осциллографе, представлен на рис. 2.11.