

Условия равновесия произвольной системы сил
Г еометрические
условия равновесия, как это видно из
предыдущего пункта, соответствуют двум
векторным уравнениям
еометрические
условия равновесия, как это видно из
предыдущего пункта, соответствуют двум
векторным уравнениям
![]() ,
,![]()
Проектируя эти уравнения на оси декартовой системы координат, получим шесть независимых уравнений равновесия
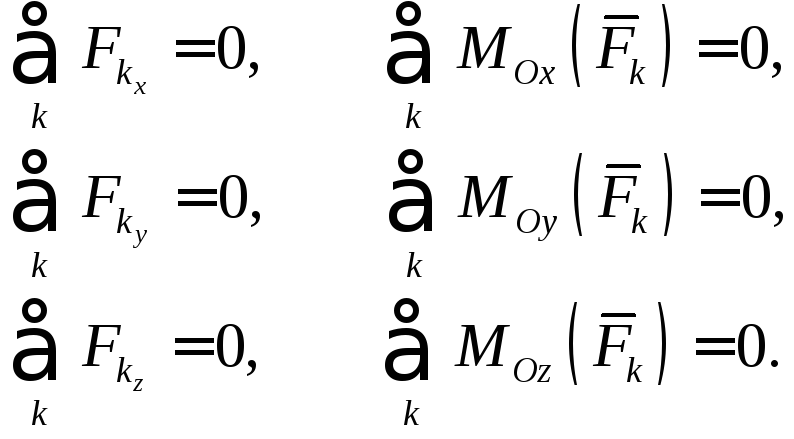
Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы равнялись нулю суммы проекций всех сил на выбранные координатные оси и суммы моментов всех сил относительно этих осей.
Различные типы систем сил и условия их равновесия:
пространственная система сходящихся сил. Выбираем начало координат совпадающее с точкой пересечения линий действия сил, входящих в рассматриваемую систему. Момент каждой из этих сил относительно любой оси, проходящей через начало отсчёта (пересекаемой линией действия силы), равен нулю. Поэтому три из шести уравнений равновесия выполнятся тождественно и условиями равновесия в этом случае будут:
![]()
пространственная система параллельных сил. Выбираем систему координат так, чтобы одна из осей (например,
 )
была направлена параллельно силам.
Проекции сил на оси
)
была направлена параллельно силам.
Проекции сил на оси и
и равны нулю, момент любой из сил,
параллельной оси, относительно этой
оси равен нулю. Поэтому из шести
уравнений равновесия получаем три
условия:
равны нулю, момент любой из сил,
параллельной оси, относительно этой
оси равен нулю. Поэтому из шести
уравнений равновесия получаем три
условия:
![]()
произвольная плоская система сил. Совместим одну из координатных плоскостей (например
 )
с плоскостью действия сил, тогда,
очевидно, будут тождественно равными
нулю следующие параметры произвольной
силы:
)
с плоскостью действия сил, тогда,
очевидно, будут тождественно равными
нулю следующие параметры произвольной
силы:
![]()
Поэтому условия равновесия запишутся в виде трёх уравнений:
![]()
Теорема о моменте равнодействующей (теорема Вариньона)
Векторный момент равнодействующей рассматриваемой системы сил относительно любой точки равен сумме векторных моментов всех сил этой системы относительно той же точки.
Иными словами, если![]() ,
то
,
то
![]()
Для плоской системы сил данная теорема запишется в виде алгебраических моментов относительно произвольной точки на плоскости
![]()
Эта теорема широко применяется в вычислениях моментов сил при решении практических задач.
Применение условий равновесия Различные формы условий равновесия
Условия равновесия произвольной плоской системы сил в виде
![]()
называют основной формой условий.
Эта система уравнений равновесия не является единственной. Условия равновесия можно сформулировать в других, эквивалентных основной, формах.
Для равновесия плоской системы сил необходимо и достаточно, чтобы равнялись нулю суммы алгебраических моментов всех сил системы относительно трёх любых точек в плоскости действия сил, не лежащих на одной прямой.
![]()
Для равновесия плоской системы сил необходимо и достаточно, чтобы алгебраические суммы моментов относительно двух точек, лежащих в плоскости действия сил, и сумма проекций всех сил на ось, не перпендикулярную линии АВ, соединяющей выбранные точки, равнялись нулю.
![]()
Статически определимые и статически неопределимые задачи
Число независимых условий равновесия определяется тем, к какому классу относится рассматриваемая система сил. Например, для произвольной плоской системы сил таких уравнений три, а для произвольной пространственной уже шесть.
Число неизвестных параметров определяется спецификой каждой задачи. В частности, оно зависит от количества и типов опор и неизвестных активных сил.
В том случае, когда число уравнений равновесия равно числу неизвестных задачи, она разрешима и называется статически определённой, в случае превышения числа неизвестных над количеством уравнений — статически неопределенной задачей. Если число неизвестных меньше числа уравнений, то либо часть уравнений тождественно удовлетворяется, либо задача переопределена (это, обычно, случаи, полученные при неправильно проведённом анализе сил) или система не находится в равновесии.
В статике абсолютно твёрдого тела рассматриваются только статически определённые задачи, т. к. для решения статически неопределённых задач нужно учитывать деформируемость тела.