

Книги / элмех2000
.pdf32 Электрические машины постоянного тока Ч. I
уменьшается. Из-за непостоянства напряжения генераторы последовательного возбуждения применяются лишь в немногих специальных случаях.
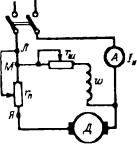
Генератор с. мешанного возбуждения имеет две обмотки возбуждения: параллельную ПАР и последовательную ПОС
(рис. I-8.12). У такого генератора напряжение остается практически постоянным при изменениях нагрузки в определенных пределах. Это достигается путем использования последовательного возбуждения для компенсации потери напряжения в якоре и в обмотке возбуждения, а также для компенсации размагничивающего действия якоря. Благодаря наличию обмотки последовательного возбуждения главный магнитный поток генератора и вместе с ним э.д.с. ЕЯ возрастают с увеличением нагрузки. Соот-
ветствующим подбором числа витков обмотки последовательного возбуждения можно достичь равенства напряжений генератора при холостом ходе и при номинальной нагрузке (кривая а на рис. I-8.13). В тех специальных случаях, когда повышение напряжения генератора должно компенсировать возрастание потери напряжения в линии, генератор может быть снабжен усиленной последовательной обмоткой возбуждения (кривая b).
Генератор смешанного возбуждения удобен в установках относительно небольшой мощности, чтобы предупредить возникновение значительных изменений напряжений при отключениях отдельных потребителей. Но использование таких генераторов для параллельной работы обычно неудобно: случайное понижение частоты вращения первичного двигателя генератора может сделать э.д.с. генератора меньше напряжения сети, из-за этого ток в якоре генератора и в его последовательной обмотке возбуждения изменит свое направление, что может вызвать перемагничивание генератора и тяжелую аварию установки.
9. Двигатели постоянного тока
Как и генераторы, двигатели постоянного тока имеют независимое, параллельное, последовательное и смешанное возбуждения. Для рассмотрения физических процессов в двигателе примем схему параллельного возбуждения (рис I-9.1)
При подаче напряжения на клемы машины появляется две цепи с токами - якорная и цепь возбуждения. Ток в цепи возбуждения создает поток Ф который пронизывает якорную обмотку.
Гл. 9 |
Двигатели постоянного тока |
33 |
Этот ток IB ограничен большим числом витков и высоким сопро-
тивлением обмотки. Ток якорной цепи определяется по формуле
3.4
|
|
|
|
Iа |
U E |
|
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
ra |
|
|
|
|
Поскольку, во время включения |
|
||||||||
двигателя, якорь не подвижен, согласно |
|
||||||||
(3.1) при |
n 0, |
E 0. Сопротивление |
|
||||||
якорной обмотки |
rЯ |
мало - для машин |
|
||||||
средней |
мощности |
составляет десятые |
|
||||||
доли Ома. Таким образом в момент за- |
|
||||||||
пуска, ток якрной цепи может превышать |
|
||||||||
допустимый в 10-50 раз. При слабом пру- |
|
||||||||
жинном контакте между щеткой и коллек- |
|
||||||||
торными |
пластинами |
возникает |
"дуга", |
Рисунок I-9.1 |
|||||
щетка приваривается |
к пластине |
и при |
|||||||
|
|||||||||
появлении момента вращения
MBP CeIaФB
может произойти разрушение коллектора. Допускается "пусковой
ток" не более двух номиналов, что допускается |
|
|||||||
I |
|
|
U |
|
|
2I |
(9.1) |
|
r |
r |
|
||||||
П |
|
H |
|
|||||
|
|
a |
П |
|
|
|
|
|
Введем в якорную цепь пусковой реостат rП (рис. I-9.1).
Для получения скоростной и механической характеристик следует воспользоваться уравнениями 3.1, 3.2 и 3.4 Подставив значение Э.Д.С. в уравнение напряжения якорной цепи, получим уравнение скоростной характеристики:
|
U raIa |
|
|
n |
|
|
(9.2) |
CeФВ |
|
||
|
|
|
|
Если в этом уравнении ток Ia выразить через момент MBP |
|||
из уравнения 3.2, получим уравнение механической характеристики:
n |
U |
|
MBP |
ra |
|
(9.3) |
|
C |
Ф |
е |
C C Ф |
|
|||
|
e |
|
|
e M |
В |
||
Поскольку Ia ~MBP , видно из уравнения
MBP CMIaФВ

34 |
Электрические машины постоянного тока |
Ч. I |
где СМ и ФВ величины постоянные, для анализа работы машины
можно пользоваться только скоростной характеристикой. Анализ равнения скоростной характеристики показывает что:
a)При ФВ 0 , n , т. е. при обрыве цепи возбуждения в двигателях параллельного возбуждения при незначительной нагрузке на валу, скорость вращения якоря неограниченно возрастает за счет остаточного магнитного потока ФОСТ и
может привести к разрушению машины.
a)Двигатели последовательного возбуждения по той же причине запрещено соединять с рабочим механизмом при помощи ременных и цепных передач, т.к. при их обрыве наступает явление "разноса" машины.
Механическая характеристика двигателя параллельного
возбуждения (рис. I-9.2) при постоянном напряжении и, следовательно, постоянном потоке возбуждения в рабочей части имеет вид прямой, т.к. в уравнении (9.2) переменной величиной является
только ток Ia
или M. При изменении сопротивления якоря (введение пус-
кового реостата) можно получить семейство характеристик с большим наклоном. При увеличении нагрузки на валу, увеличивается ток якоря, уменьшается поток
ФВ и характеристика загибается вниз |
|
|
за счет реакции якоря. |
|
|
Механическая |
характеристика |
|
двигателя последовательного возбуж- |
|
|
дения (рис. I-9.3) пересекает ось орди- |
|
|
нат при очень высоких значениях ско- |
|
|
рости вращения n, т.к. поток возбуж- |
Рисунок I-9.3 |
|
дения ФВ зависит от тока якоря Ia , и |
||

Гл. 10 |
Исполнительные двигатели постоянного тока |
35 |
соответственно, от момента на валу. Кривая 2 получается при введении реостата в цепь якоря.
При смешанном возбуждении, когда имеются две обмотки, включенные согласно, уравнение принимает вид:
|
|
n |
|
U raIa |
|
|
|
Ce |
ФПАР ФПОСЛ |
|
|
|
|
|
|||
механическая |
характери- |
|
|
||
стика (рис. I-9.4) становит- |
|
|
|||
ся болеемягкой |
и имеет |
|
|
||
верхний предел |
скорости |
|
|
||
вращения. |
|
|
|
|
|
При |
встречном |
|
|
||
включении обмоток , ха- |
|
|
|||
рактеристика |
становится |
|
|
||
идеально жесткой, т.е. па- |
|
|
|||
раллельна оси абсцисс.
Рисунок I-9.4
10.Исполнительные двигатели постоянного тока
Двигатели постоянного тока широко используются как исполнительные двигатели в системах автоматического регулирования, в счетно-решающих устройствах, в следящем приводе.
Исполнительные двигатели (ИД) предназначены для точной отработки команд - сигналов, подаваемых в форме напряжения управления различной величины и соответствующей полярности. Мощность ИД обычно не превышает 0,6 КВт. Двигатели постоянного тока наиболее полно отвечают одному из главных требований, предъявляемых к ИД - способности плавно и глубоко регулировать скорость вращения.
Для восприятия сигнала управления цепь якоря и цепь возбуждения у ИД независимы, причем одна из цепей включена постоянно, а на вторую подается напряжение управления.
При обычной схеме управления двигателем сигнал подается на обмотку якоря; обмотка возбуждения включена на постоянное напряжение (иногда поток возбуждения создается постоянными магнитами). Такое управление называется якорным. Механические характеристики двигателя при якорном управлении соответствуют кривым рис. I-9.2. Потребляемая обмоткой возбуждения мощность очень невелика. Однако мощность сигнала должна быть значительной: практически она равна мощности ИД. Такой сигнал может быть получен только от мощного усилителя.

36 |
|
Электрические машины постоянного тока |
|
Ч. I |
|||
|
При небольшой мощности усилителя (например, электрон- |
||||||
ного) |
применяют полюсное |
|
|
|
|||
управление: цепь якоря ИД |
|
|
|
||||
включают (обычно с доба- |
|
|
|
||||
вочным сопротивлением) |
на |
|
|
|
|||
постоянное напряжение, |
а |
|
|
|
|||
цепь |
возбуждения |
воспри- |
|
|
|
||
нимает сигнал |
управления |
|
|
|
|||
от усилителя. Механические |
|
|
|
||||
характеристики |
двигателя |
|
|
|
|||
при |
полюсном |
управлении |
|
|
|
||
соответствуют |
кривым рис. |
|
|
|
|||
I-9.3. Они более мягкие, чем |
|
|
|
||||
при якорном управлении ИД. |
|
|
|
||||
Точность отработки сигнала |
Рисунок I-10.1 Малоинерционный |
||||||
ИД |
повышается, |
если |
исполнительный двигатель постоянно- |
||||
уменьшить момент инерции |
го тока |
|
|
||||
якоря. Это достигается, в |
|
|
|
||||
частности, устройством полого якоря (рис. I-10.1), когда вращают- |
|||||||
|
|
|
|
|
ся только коллектор |
||
|
|
|
|
|
и обмотка, запрессо- |
||
|
|
|
|
|
ванная в пластмас- |
||
|
|
|
|
|
совый "стакан". Но |
||
|
|
|
|
|
так как при этом уве- |
||
|
|
|
|
|
личивается |
немаг- |
|
|
|
|
|
|
нитный зазор в ма- |
||
|
|
|
|
|
шине, то увеличива- |
||
|
|
|
|
|
ется |
необходимая |
|
|
|
|
|
|
мощность возбужде- |
||
Рисунок I-10.2 Конструкция микродвигателя ния и габариты ИД. |
|||||||
с дисковым якорем и печатной обмоткой |
Другим |
спосо- |
|||||
|
|
|
|
|
бом |
уменьшения |
|
инерционности ИД является применение относительно недавно разработанных микродвигателей с печатной обмоткой на дисковом якоре (рис. I-10.2). Якорь представляет собой тонкий немагнитный диск 1 (из текстолита или керамики) с печатной однослойной волновой обмоткой. Плоские (из фольги) проводники обмотки расположены радиально по обеим сторонам диска и соединены между собой через отверстия в нем. Серебряно-
Гл. 10 |
Исполнительные двигатели постоянного тока |
37 |
графитовые щетки 2 скользят по поверхности проводникв на. одной стороне диска, подводя к якорю ток напряжением до 30 В.
Магнитный поток, создаваемый постоянными магнитами 3, пронизывает диск в осевом направлении, замыкаясь по кольцам 4 и 5 из мягкой стали. Корпус микродвигателя (крышки) немагнитный. Электромеханическая постоянная времени дискового якоря весьма мала - около 0,01 сек.

II. Общие вопросы теории машин переменного тока
1.Конструкция обмоток статора
1.1Назначение и классификация обмоток статора
Обмотка статора машин переменного тока имеет много об-
щего с обмоткой якоря машин постоянного тока. Но между ними есть и существенная разница - обмотки переменного тока не замкнуты.
Элементом обмотки статора является секция, которая может быть одно- и многовитковой. Секция состоит из активных сторон и лобовых частей. Расстояние между активными сторонами секций называется шагом обмотки у.
Шаг называют диаметральным или полным, если он ра-
вен полюсному делению (y Z2p- целое число), и укорочен-
ным, если он меньше полюсного деления (у < ). Применяемые в настоящее время обмотки статора классифицируют:
1)по числу фаз - однофазные и многофазные (главным образом трехфазные);
2)по способу укладки секций в пазы - однослойные, когда сторона секции занимает весь паз, и двухслойные, когда в одном пазу лежат две стороны различных секций (по аналогии с обмоткой якоря машины постоянного тока);
3)в зависимости от ширины секций - обмотки с полным и обмотки с укороченным шагом;
4)по числу пазов на полюс и фазу q - обмотки с целым q и обмотки с дробным q;
5)по способу выполнения секций - катушечные и стержневые обмотки.
Двухслойные обмотки статоров разделяют на петлевые и волновые. Преимущественное применение получили петлевые обмотки. Волновые обмотки статоров применяют редко, главным образом в гидрогенераторах большой мощности. Гораздо чаще волновые обмотки переменного тока применяют в роторах асинхронных двигателей с контактными кольцами. Исходя из этого, в настоящей главе рассмотрены лишь петлевые обмотки двухслойного статора.
Гл. 1 |
Конструкция обмоток статора |
39 |
К обмоткам статора машин переменного тока предъявляют ряд требований. Некоторые из них, общие для всех обмоток электрических машин, - технологичность, минимальный расход проводниковых и изоляционных материалов, эксплуатационная надежность. Наряду с этим имеются специальные требования:
1)фазные напряжения должны быть одинаковыми по величине и сдвинуты по фазе относительно друг друга на требуемый угол (для трехфазных обмоток - 120 эл. град);
2)активные и индуктивные сопротивления всех фазных обмоток должны быть одинаковыми (это требование не распространяется на двухфазные обмотки);
3)форма кривой линейной э.д.с. должна быть практически синусоидальной.
В соответствии с ГОСТ выводы обмоток трехфазных машин переменного тока обозначают следующим образом:
первая фаза начало С1 - конец С4 вторая фаза начало С2 - конец С5 третья фаза начало С3 - конец С6
1.2Трехфазная двухслойная обмотка статора
Простейшая трехфазная обмотка может быть выполнена
тремя секциями, оси которых сдвинуты по окружности статора на 1/3 двойного полюсного деления (120 эл. град). Каждая секция в этом случае представляет собой фазную обмотку, называемую сосредоточенной, так как все витки каждой фазы этой обмотки сосредоточены в двух пазах. Сосредоточенные обмотки не получили практического применения, так как они не удовлетворяют изложенным выше требованиям.
В машинах переменного тока применяют распределенные обмотки, в которых каждая фазная обмотка состоит из нескольких секций, занимающих q пазов в пределах каждого полюсного деления. Таким образом, для образования трехфазной обмотки зубцовый слой сердечника статора в пределах каждого полюсного деления необходимо разделить на три зоны по q пазов в каждой. Порядок чередования таких зон под каждым полюсом должен быть одинаковым. Секции, уложенные в пазы одинаковых зон, образуют фазные обмотки.
Число пазов, приходящихся на полюс и фазу,
q |
Z |
(1.1) |
|
2p
где m - число фаз (для трехфазной обмотки m = 3).

40 |
Общие вопросы теории машин переменного тока |
Ч. II |
Угол сдвига между осями фазных обмоток в трехфазной обмотке составляет 120 эл. град. Однако, для построения схемы обмотки удобнее этот сдвиг выразить в пазах. Вся окружность статора составляет 360 эл. град., поэтому угол между соседними пазами (град.)
360 |
p |
(1.2) |
|
Z |
|||
|
|
Тогда сдвиг между фазными обмотками, выраженный в па-
зах
|
1200 |
(1.3) |
Рассмотрим на примере порядок построения развернутой схемы трехфазной двухслойной обмотки статора. Двухслойные обмотки преимущественно распространены в машинах переменного тока, это объясняется рядом их достоинств, из которых главным является возможность любого укорочения шага обмотки, что дает в свою очередь возможность максимально приблизить форму кривой э.д.c. к синусоиде. Однако двухслойные обмотки не лишены недостатков, к которым, прежде всего следует отнести некоторые затруднения при укладе секций обмотки, трудность ремонта обмотки при повреждении изоляции нижнего слоя, а также невозможность выполнить разъемным статор без нарушения обмотки в местах разъема.
1.3 Способы соединения секционных групп обмоток статора
Секционной группой называют ряд последовательно со-
единенных между собой секций, которые лежат в соседних пазах и быть соединены последовательно или параллельно, что влияет на число параллельных ветвей в обмотке.
На рис. II-1.1. показано последовательное соединение двух секционных групп фазной обмотки, для чего необходимо
Рисунок II-1.1
нижний конец первой секционной

Гл. 1 |
Конструкция обмоток статора |
41 |
группы (K1A) соединить с нижним концом второй секционной группы (К2А), а верхние концы вывести к зажимам фазной ки (С1-С4). При таком соединении секционных групп э.д.с. фазной обмотки представляет собой сумму э.д.c. всех секционных групп.
На рис. II-1.2 показано последовательное соединение че-
Рисунок II-1.2
тырех секционных групп. Здесь вторая и третья секционные группы соединены верхн ими концами. Третья и четвертая - нижними концами, а к выводам фазной обмотки присоединены верхние концы первой и четвертой секционных групп. При последовательном соединении секционных групп фазная обмотка независимо от числа полюсов машины содержит одну параллельную ветвь
(2a=2p).
Двухслойная обмотка в каждой фазе имеет 2p секционных групп, поэтому, соединив все секционные группы параллельно, получим обмотку, состоящую из 2p параллельных ветвей (2a=2p).
Если половину секционных групп каждой фазной обмотки соединить параллельно в одну ветвь, а затем соединить параллельно, то получим последовательно-параллельное (смешанное) соединение секционных групп с двумя параллельными ветвями в фазной обмотке (2a=2p). Чтобы э.д.c. параллельных ветвей были одинаковы, в каждую параллельную ветвь через одну включают секционные группы. Таким образом, в одной параллельной ветви оказываются все четные секционные группы, а в другой - все нечетные.
1.4Однослойные обмотки статора
Трехфазная обмотка. В однослойных обмотках каждая сторона секции полностью заполняет паз сердечника статора.