

2.2 Управление высотой полета
При выполнении горизонтальных полетов летчику довольно часто приходится воздействовать на ручку «шаг-газ» для поддержания неизменной высоты. Для разгрузки летчика от этой работы в автопилоте предусмотрен канал высоты, воздействующий на общий шаг несущего винта вертолета (рис.4).
В качестве чувствительного элемента используется корректор высоты, выдающий в автопилот сигнал изменения барометрической высоты полета. В отличие от каналов угловой стабилизации, где одновременно могут работать два контура: «вертолет-летчик» (контур 2) и «вертолет-автопилот» (контур 1), в канале высоты при вмешательстве летчика в управление автопилот отключается (выключатель В1 разомкнут). В остальном работа контура стабилизации высоты аналогична работе контура угловой стабилизации.
2.3 Управление скоростью полета
Кроме стабилизации угловых движений и высоты полета вертолета на большинстве режимах требуется поддержание неизменной скорости полета. На вертолете управление скоростью полета происходит при помощи тех же рычагов управления, что и управление углом тангажа, т. к. скорости полета вертолета при неизменном при неизменном общем шаге зависит главным образом от угла тангажа вертолета. Хотя стабилизация угла тангажа косвенно обеспечивает стабилизацию скорости полета, но точность стабилизации при этом недостаточна.

Рисунок 4 - Схема включения канала высоты автопилота в систему управления вертолета.

Рисунок 5 - Схема включения корректора скорости в систему управления вертолета
В связи с этим на вертолетах последних выпусков дополнительно устанавливается на борту корректор воздушной скорости, с которого сигнал изменения скорости полета поступает в канал тангажа автопилота, вызывая соответствующие изменения угла тангажа вертолета, чем и обеспечивается повышение точности стабилизации скорости полета. Схема включения корректора скорости в контур стабилизации угла тангажа приведена на (рисунок 5). Контур стабилизации тангажа становится при этом вспомогательным, так как выходной стабилизируемой величиной является в этом случаи скорость полета вертолета.
2.4. Основные функциональные узлы и структурная схема автопилота
Каждый канал автопилота АП-34Б (направление, крен, тангаж и высота) воздействует на отдельные самостоятельные органы управления в системе управления вертолета, канал автопилота можно разбить на 2-е основные функциональные части: чувствительные элементы и сервопривод.
В
качестве чувствительных элементов в
каналах направления, крена и тангажа
используются датчики соответствующих
углов (крена, тангажа и направления) и
датчики соответствующих угловых
скоростей, при стабилизации скорости
полета в качестве чувствительного
элемента используется корректор
воздушной скорости, в канале высоты в
качестве чувствительного элемента
используется корректор высоты. Сигналы
с этих чувствительных элементов после
преобразования и суммирования поступают
в виде заданных отклонений органов
управления
 на сервопривод. Структурная схема
сервопривода представлена на (рисунок
6).
на сервопривод. Структурная схема
сервопривода представлена на (рисунок
6).
Из структурной схемы следует:
 ,
(2.1)
,
(2.1)
где

 -
коэффициент усиления усилителя
сервопривода
-
коэффициент усиления усилителя
сервопривода
автопилота

 -
крутизна скоростной характеристики
рулевого
-
крутизна скоростной характеристики
рулевого
агрегата

δ
и
 - перемещение органов управления
- перемещение органов управления

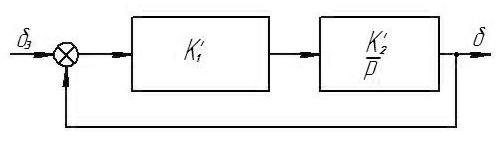
Рисунок 6 - Структурная схема сервопривода.

Рисунок 7 - Упрощенная структурная схема сервопривода.
В
автопилоте АП-34Б
 ,
следовательно, постоянная времени
,
следовательно, постоянная времени
 ,
и поэтому в первом приближении можно
считать
,
и поэтому в первом приближении можно
считать
 .
.
Учитывая, что рулевые агрегаты типа КАУ-30Б, РА-60А и РП-28 имеют ограничения по сигналам автопилота порядка 20% от общего хода органов управления, сервопривод в дальнейшем можно рассматривать, как пропорциональное звено с 20% ограничением (рисунок 7).
Вертолет
с точки зрения его динамических
характеристик по всем каналам можно
представить в виде динамического звена,
у которого входным воздействием является
управляющее воздействие δ (отклонение
органов управления), а входным изменение
угловых положений или высоты полета. В
первом грубом приближении вертолет
можно представить как последовательное
соединение 2-х звеньев: интегрирующее
 и инерциального
и инерциального
 .
.
Физически это означает, что при отклонении органов управления вертолет в первый момент получает ускорение и затем с постоянной времени Т выходит на постоянную скорость изменения угловых положений и высоты полета.
С учетом вышеизложенного можно составить общую структурную схему системы автоматического управления «вертолет-автопилот» (рисунок 8-9).
Как
уже указывалось ранее, скорость полета
вертолета зависит от угла тангажа. В
первом приближении можно считать, что
скорость полета вертолета V
и угол тангажа ϑ связаны между собой
соотношением
 ϑ
ϑ
В случаи наличия на борту корректора скорости и использования его сигналов для стабилизации скорости полета вертолета, структурную схему системы «вертолет-автопилот» по каналу стабилизации скорости можно представить следующим образом (рисунок 10).
На приведенных структурных схемах везде изображен летчик в качестве одного из звеньев системы управления. Если летчик не вмешивается в управление, функционирует только одна замкнутая система - «вертолет-автопилот», этот режим называется режимом стабилизации, так как автопилот стремится поддержать неизменным режим полета. Если же летчик вмешивается в управление, работает две замкнутые системы – «вертолет-автопилот» и «вертолет-летчик». Этот режим называется режимом управления.