

Тогда выражение для момента импульса тела |
|
относительно оси принимает окончательный вид: |
|
Lz |
J ω |
z |
|
|
|
L |
|
0 |
ò åëî |
|
|
3.4. Основной закон динамики вращательного движения
Пусть твёрдое тело вращается вокруг закреплённой оси.
Разобьём тело на материальные точки.
Момент импульса материальной точки относительно оси вращения определяется выражением:
LZ (r p)Z
Выясним, от чего зависит изменение момента импульса материальной точки.
Вычислим производную от вектора момента импульса
по времени: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
d |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
dL |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
(r |
p) |
|
|
|
m(r |
v) |
|
||||
|
dt |
dt |
dt |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
m( |
dr |
|
|
|
dv |
) |
|
|
|||||||
|
|
|
v) m(r |
|
|
|
||||||||||
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
||||
|
m(v v) m(r |
a) 0 (r |
F) M |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость изменения момента импульса материальной точки равна моменту сил, действующих на эту точку.
Подобное утверждение справедливо и для момента импульса материальной точки относительно некоторой оси Z.
dL |
|
dL |
z |
|
|
M и |
|
Mz |
|
dt |
dt |
|
||
|
|
|
Другая формулировка: изменение момента импульса равно импульсу момента приложенной силы:
dL M dt
Запишем такие же выражения для каждой точки вращающегося тела, а затем просуммируем по всем точкам тела:
|
dLzi Mzi |
|
|
d Lzi Mzi |
|||
|
|
|
|
|
|
n |
n |
|
|
|
|
|
|
|
|
|
dt |
|
|
dt i 1 |
i 1 |
||
|
|
|
|
|
|
|
|
|
dLz |
n |
n |
|
Mzi внутр. Mzi внеш. |
||
|
|
||
|
dt i 1 |
i 1 |
|
Впоследнем равенстве Lz – момент импульса тела относительно оси Z.
n
Mziвнутр. 0 i 1
– сумма моментов внутренних сил равна нулю.
n
Mziвнеш. MZi,ВНЕШ i 1
– сумма моментов внешних сил.
Тогда для всего тела в целом имеем равенство:
dL
dtz Mz внеш.

dL
dtz Mz внеш.
Полученное равенство выражает наиболее общую запись основного закона динамики вращательного движения.
Формулировка закона: скорость изменения момента импульса твёрдого тела относительно оси вращения равна результирующему моменту внешних сил, действующих на это тело относительно этой же оси.
Учтем, что |
Lz J ω |
|
|
|
|
Момент инерции J абсолютно твердого тела – постоянная величина.
Вынесем её за знак дифференциала:
|
|
d |
J ω Mz внеш. |
|
|
J dω |
M z внеш. |
||
|
|
dt |
|||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|||
Обозначим |
dω |
ε z |
|
|
|
|
|||
|
|
|
|
dt |
|
|
|
|
|
εz – проекция вектора углового ускорения на ось Z, направленную по вектору угловой скорости.
Окончательно получим: |
J εz Mz внеш. |
|
J εz Mz внеш.
Равенство, записанное для проекций входящих величин, можно записать и для модулей и для векторов этих
величин: |
|
|
|
|
|
|
|
|
M внеш. |
|
|
|
M |
внеш. |
|
||
|
|
|
||||||
|
ε |
J |
|
ε |
|
|
||
|
|
|
|
J |
||||
|
|
|
|
|
|
|
|
|
Другая формулировка основного закона динамики вращательного движения закона:
угловое ускорение твёрдого тела при его вращении вокруг закреплённой оси прямо пропорционально результирующему моменту внешних сил относительно этой же оси и обратно пропорционально моменту
инерции тела.
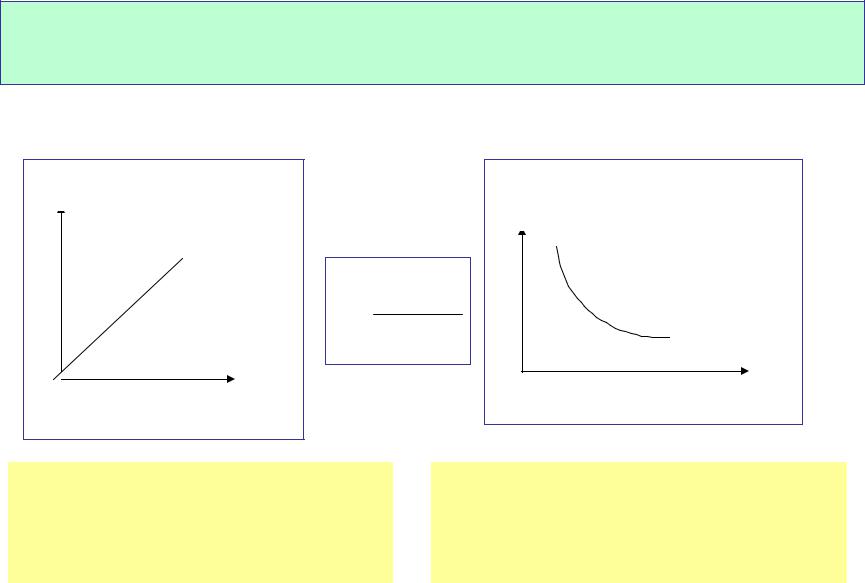
Графическая интерпретация
ε |
ε |
|
|
|
ε Mвнеш. |
|
J |
М |
J |
Угловое ускорение |
|
Угловое ускорение |
прямо пропорционально |
|
обратно пропорционально |
моменту силы |
|
моменту инерции |