

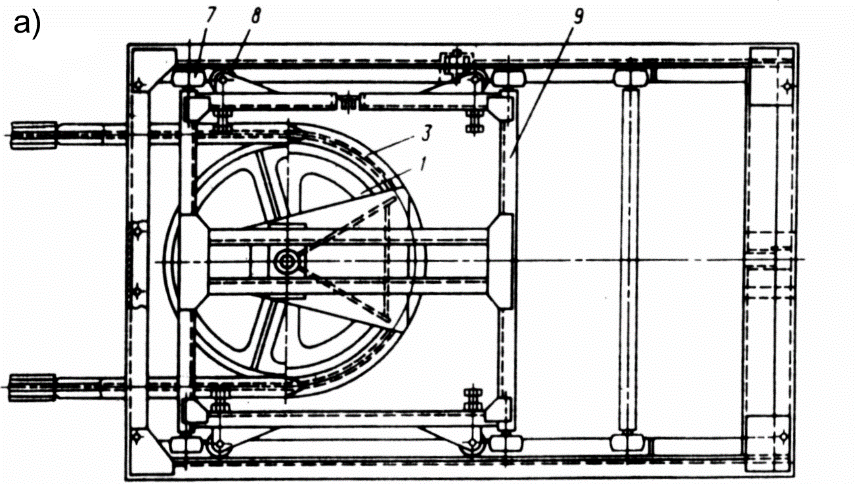
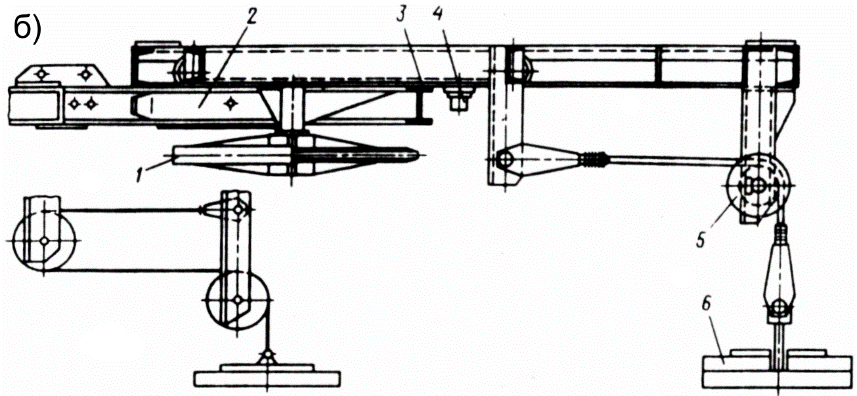
3. Натяжні пристрої підвісних конвеєрів
На підвісних конвеєрах застосовують вантажні, пневматичні, гідравлічні, пружно-гвинтові та гвинтові натяжні пристрої. Вантажний натяжний пристрій (рис. 2.26) складається із рухомого візка 9, до якого кріпиться поворотний пристрій 1 (поворотна зірочка) і рухомі поворотні напрямні 3 конвеєра, натяжного вантажу 6 з канатами і направляючими блоками 5. Під дією сили тяжіння вантажу візок відходить назад і натягує ланцюг, що охоплює поворотний пристрій, створюючи необхідний попередній натяг. Хід натяжного пристрою становить 250, 400 і 600 мм. Натяжний візок встановлюють на чотирьох вертикальних опорних 7 і горизонтальних напрямних 8 котках. За допомогою спеціальних рухомих стиків 2 з’єднують нерухомі і рухомі частини конвеєра. В граничних положеннях візка встановлюють вимикачі 4.
Вантажні натяжні пристрої виконують без поліспаста (рис. 2.26, а) при силі натягу до 4 кН і з поліспастом (рис. 2.26, б) при силі натягу до 16 кН.
У конвеєрів легкого типу, з натягом ланцюга до 4 кН натяжний пристрій іноді об’єднують з приводом, встановлюючи приводний механізм на натяжному візку. В багато приводних конвеєрах число натяжних пристроїв рівне числу приводів.
Натяжний пристрій
Рис. 2.26 |
4.
Визначимо необхідний динамічний момент
інерції маховика, який дозволить
підтримувати частоту обертання ведучого
валу з заданим ступенем нерівномірності
![]() .
Для цього використовуємо відому із
курсу ТММ формулу:
.
Для цього використовуємо відому із
курсу ТММ формулу:
|
(3.35) |
 ,
,
де ![]() –
надлишкова робота крутного моменту,
тобто робота моменту, що перевищує
середню за цикл.
–
надлишкова робота крутного моменту,
тобто робота моменту, що перевищує
середню за цикл.
Динамічний момент інерції маховика, як відомо, зв’язаний з його геометричними розмірами та масою (вважаємо, що вся маса зосереджена в ободі) залежністю:
|
(3.36) |
 ,
,
де ![]() –
маса обода маховика;
–
маса обода маховика;
![]() –
середній діаметр обода.
–
середній діаметр обода.
Виходячи із конструктивних умов, необхідно задатись середнім діаметром обода і визначити масу обода:
|
(3.37) |
 .
.
Рекомендується:
при
![]() ,
,
![]() ;
а при
;
а при
![]() ,
,
![]() .
.
Повна
маса маховика
![]() із маточиною та спицями
із маточиною та спицями
|
(3.38) |
Визначимо ширину обода маховика:
|
(3.39) |
 ,
,
де ![]() –
густина матеріалу, для сталі
–
густина матеріалу, для сталі
![]() .
.
Білет 6
1. Електромеханічні підйомники
Електромеханічні стаціонарні підйомники бувають одно...шестистійкові вантажопідйомністю від 1,5 до 24 і більше тон.
В цій групі підйомників використовується гвинтова, ланцюгова, канатна, карданна, трансмісійним валом або важільно-шарнірна силова передача. Приводами таких підйомників являються електродвигуни.
Електромеханічні підйомники
б)
а – двостійкові типу KPN; б – чотиристійкові типу КР Рис. 1.30 |
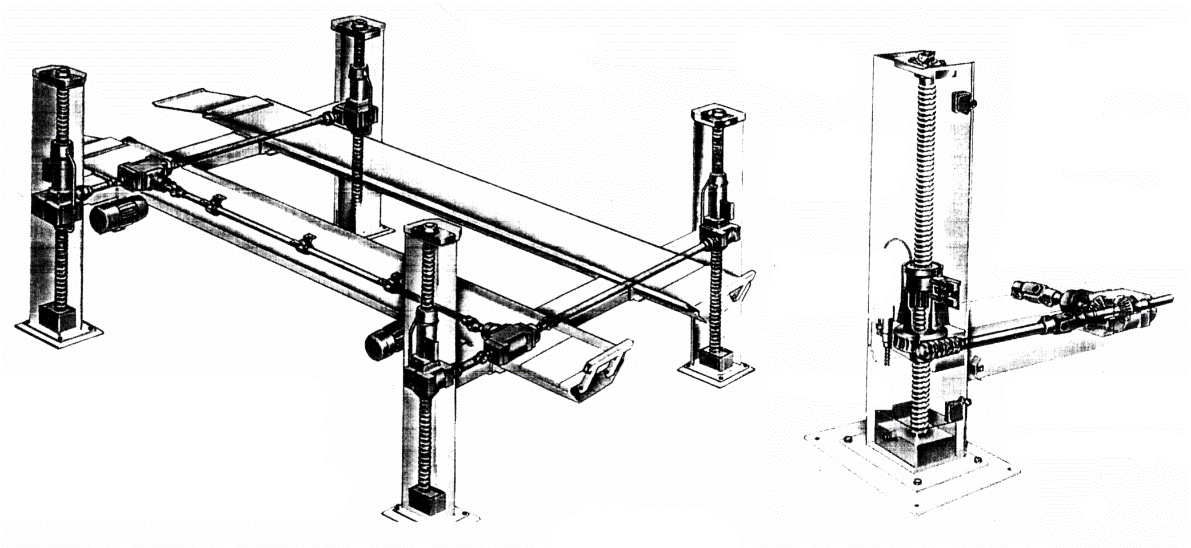
Сучасні електромеханічні підйомники типи KPN та КР зображені на рис. 1.30. Принципіальна схема гвинтового двостійкового електромеханічного підйомника показана на рис. 1.31.
Такий підйомник складається із стійок 1, електродвигуна 2, редуктора 3, гвинта 4, гайки 5, ланцюгової передачі 6, кінцевих вимикачів 7, підйомних розсувних важелів 8 та страхуючих гайок 9.
Ходові гвинти 4 приводяться в рух електродвигуном 2 через редуктор 3, які встановлені на одній із стійок 1. Обертання на другий гвинт передається за допомогою ланцюгової передачі 6. Таким чином, вантажні гайки 5 з розсувними важелями 8 рухаються вверх або вниз залежно від напряму обертання гвинтів. На розсувних важелях 8 встановлюється автомобіль. В крайніх положеннях гайки 5 важелі зупиняються кінцевими вимикачами 7.
Під вантажними гайками ще розміщені страхуючі гайки 9.
Висота підйому автомобіля – 1,7...1,8 м. Час підйому складає 30...90 с.
Розрахунки на міцність елементів гвинтового електромеханічного підйомника, при необхідності, можуть бути виконані відомими із курсу деталей машин методами.
|

2. Вплив конструктивних особливостей віброагрегату на зусилля в кріпильних вузлах
В процесі роботи віброактивного агрегату (рис. 5.1) , в результаті незрівноваженості обертових мас , в кріпильних вузлах А і В виникають зусилля в горизонтальній і вертикальній площинах. Ці зусилля можуть бути знайдені за формулами :
|
(5.33) |
Значення хА, хВ, уА і уВ визначаються із (5.10).
Розв’язування системи диференційних рівнянь (5.23), (5.24) та (5.26) з врахуванням / 5. 33/ виконаємо на прикладі дослідження роботи відцентрового вентилятора ВЦ 14-46 №5 з приводом від електродвигуна 4А 160М4.
Технічна характеристика віброагрегату типу відцентровий вентилятор №5 – електродвигун 4А 160М4 наведена в таблиці 5.1.
Таблиця 5.1.