

2.3. Регулирование положения.
Обеспечение технологических процессов ряда рабочих машин требует перемещения их исполнительных органов в заданную точку пространства и их установку там (фиксирование) с заданной точностью. К таким рабочим машинам и механизмам относятся роботы и манипуляторы, подъемно-транспортные механизмы, клапаны, задвижки, механизмы подач станков и др. Перемещение и установка исполнительных органов в заданное положение носит название позиционирования, а обеспечивающие эти операции ЭП называются позиционными. Позиционирование обеспечивается соответствующим регулированием положения вала двигателя и может осуществляться по двум вариантам.
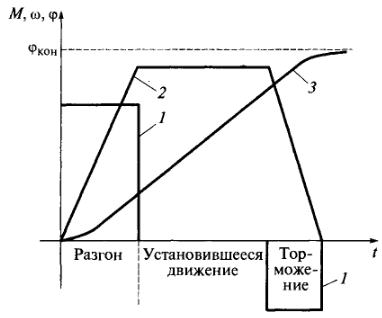
Рис. 3.3. Оптимальные графики движения при регулировании положения:
1 - график момента; 2 - график скорости; 3 - график угла поворота вала двигателя.
В случаях невысоких требований к точности позиционирование осуществляется с помощью путевых или конечных выключателей. Выключатели устанавливаются в заданных позициях и при подходе к ним исполнительного органа производятся отключение двигателя и остановка исполнительного органа. Такой принцип позиционирования находит применение, например, для обеспечения точной остановки кабин лифтов массового применения.
При
необходимости обеспечения высокой
точности позиционирования формируется
оптимальный (или близкий к нему) график
угла поворота вала двигателя во времени
![]() .
Такой
график, показанный в виде кривой 3
на
рис. 3.3, состоит из трех участков: разгона,
движения с установившейся скоростью
и торможения. Для
его
получения должны быть сформированы
соответствующие графики момента
двигателя M(t)
(кривая
1) и скорости w(t)
(кривая 2). Они позволяют реализовать
так называемое оптимальное по
быстродействию позиционирование, при
котором обеспечиваются высокая
точность и малое время позиционирования.
.
Такой
график, показанный в виде кривой 3
на
рис. 3.3, состоит из трех участков: разгона,
движения с установившейся скоростью
и торможения. Для
его
получения должны быть сформированы
соответствующие графики момента
двигателя M(t)
(кривая
1) и скорости w(t)
(кривая 2). Они позволяют реализовать
так называемое оптимальное по
быстродействию позиционирование, при
котором обеспечиваются высокая
точность и малое время позиционирования.
Рассмотренное позиционирование реализуется в замкнутой системе «преобразователь- двигатель» с использованием обратных связей по току, скорости и положению. Отметим, что при небольших перемещениях участок установившегося движения на графике может отсутствовать.
3.1. Регулирование переменных электропривода с дпт с помощью резисторов в цепи якоря.
Включение резисторов в цепь якоря двигателя влияет как на электромеханическую, так и на механическую характеристики двигателя и может использоваться как для регулирования скорости, так и для ограничения тока и момента двигателя в переходных процессах, в частности при его пуске. Этот способ, отличаясь простотой реализации, применяется при невысоких требованиях к качеству регулирования переменных.
Для
получения искусственных (регулировочных)
характеристик двигателя проведем
следующий анализ. Из
![]() (4.7) видно, что скорость Wo
не зависит от Rд
,а
наклон характеристик, как это следует
из
(4.7) видно, что скорость Wo
не зависит от Rд
,а
наклон характеристик, как это следует
из
![]() (4.8), тем больше, чем больше Rд
. Это позволяет изобразить искомое
семейство характеристик в виде
совокупности линий (рис. 4.4) различного
наклона (жесткости), проходящих через
одну и ту же точку на оси скорости с
ординатой Wo.
(4.8), тем больше, чем больше Rд
. Это позволяет изобразить искомое
семейство характеристик в виде
совокупности линий (рис. 4.4) различного
наклона (жесткости), проходящих через
одну и ту же точку на оси скорости с
ординатой Wo.
Характеристика
1 соответствует случаю Rд=
Ои
является естественной, искусственные
характеристики 2 ... 4 построены при
наличии в цепи якоря резисторов с
сопротивлениями соответственно
![]() .
.
Регулирование скорости данным способом характеризуется следующими показателями. Диапазон регулирования скорости небольшой и обычно не превосходит 2-3. Одна из причин этого заключается в снижении жесткости характеристик по мере увеличения Rд . Направление регулирования скорости - вниз от естественной характеристики. Плавность регулирования скорости определяется характером изменения Rд.Если сопротивление этого резистора изменяется плавно, то данный способ обеспечивает плавное регулирование скорости. Чаще всего рассматриваемый способ обеспечивает ступенчатое регулирование скорости. Стабильность скорости снижается по мере увеличения диапазона регулирования, так как уменьшается жесткость регулировочных характеристик.
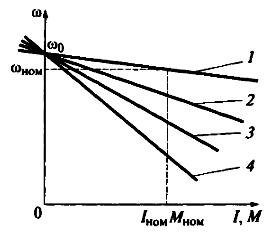
Рис. 4.4. Характеристики двигателя при различных сопротивлениях добавочнго резистора в цепи якоря;
![]()
Экономичность регулирования скорости оценим, сопоставив требуемые капитальные затраты на реализацию данного способа и стоимость потерь мощности (энергии) при регулировании. Капитальные затраты на приобретение добавочных резисторов небольшие, так как их стоимость невелика.
В то же время потери мощности и соответственно потери электрической энергии и ее стоимость оказываются существенными. Убедимся в этом, оценив потери мощности в цепи якоря - основную долю потерь в двигателе.
Потери
мощности в цепи якоря
![]() определяются разностью мощностей:
потребляемой из сети
определяются разностью мощностей:
потребляемой из сети
![]() и полезной механической на валу
и полезной механической на валу
![]()
Допустимую
нагрузку двигателя при его работе на
искусственных характеристиках
определяют исходя из номинального
тока, при котором двигатель не будет
перегреваться выше нормы. Так как при
данном способе регулирования магнитный
поток не изменяется и равен номинальному,
то подстановка в формулу
![]()
![]()
Выражение
(4.12) показывает, что при рассматриваемом
способе регулирования скорости
двигатель может без перегрева работать
на любой искусственной характеристике
с моментом нагрузки, равным
номинальному. Отметим, что способы
регулирования скорости, характеризующиеся
![]() ,
получили в теории ЭП название
«регулирование скорости при постоянном
моменте».
,
получили в теории ЭП название
«регулирование скорости при постоянном
моменте».
Рассмотренный способ применяется для регулирования скорости движения исполнительных органов при небольших диапазонах или кратковременной работе на пониженных скоростях.
Рассмотрим
порядок построения пусковой диаграммы,
если заданы
![]() и число характеристик (ступеней пускового
резистора) m
= 2 (рис. 4.6, а).
и число характеристик (ступеней пускового
резистора) m
= 2 (рис. 4.6, а).
Строится естественная характеристика 1 двигателя.
Проводится
вертикальная линия, соответствующая
абсциссе I1
= IДОII или М1 = Мдоп. Через точки а и b
с координатами
![]() и (О, I1)
проводится искусственная (реостатная)
характеристика З, соответствующая
включению в цепь якоря обеих ступеней
пускового резистора
и (О, I1)
проводится искусственная (реостатная)
характеристика З, соответствующая
включению в цепь якоря обеих ступеней
пускового резистора
![]() (рис. 4.6, б). Определяется ток переключения
по приближенному соотношению
(рис. 4.6, б). Определяется ток переключения
по приближенному соотношению
![]() и проводится вертикальная линия,
соответствующая этому току. Через
точку с пересечения этой линии с
характеристикой 3 (см.' рис. 4.6, а) проводим
горизонтальную линию до ее пересечения
в точке d с вертикалью, имеющей абсциссу
I1.
Через точки а и d проводится искусственная
(реостатная) характеристика 2, а через
точку е еще одна горизонталь до
пересечения ее в точке f
с естественной характеристикой 1. Для
точного попадания точек с, d, е, f
на вертикали с абсциссами I1
и I2
производится подбор величины тока I2.
и проводится вертикальная линия,
соответствующая этому току. Через
точку с пересечения этой линии с
характеристикой 3 (см.' рис. 4.6, а) проводим
горизонтальную линию до ее пересечения
в точке d с вертикалью, имеющей абсциссу
I1.
Через точки а и d проводится искусственная
(реостатная) характеристика 2, а через
точку е еще одна горизонталь до
пересечения ее в точке f
с естественной характеристикой 1. Для
точного попадания точек с, d, е, f
на вертикали с абсциссами I1
и I2
производится подбор величины тока I2.
Пуск двигателя начинается по характеристике З. При скорости W1, когда ток снизится до значения I2 ключом KlзакорачиваетсяRдl и двигатель переходит на характеристику 2, по которой продолжает свой разбег. При скорости W2 ключом К2закорачивается Rд2 и двигатель выходит на естественную характеристику 1.

Рис. 4.6. Пусковая диаграмма двигателя (а) и схема включения пусковых резисторов (б):
1 - естественная характеристика двигателя; 2, 3 - реостатные характеристики двигатели.
Число
ступеней т добавочного резистора, или
число используемых искусственных
характеристик, связано с пределами
изменения тока в якоре
![]() .
и током переключении I2
следующим соотношением:
.
и током переключении I2
следующим соотношением:
![]()
В качестве ключей для шунтирования добавочных резисторов используются контакторы. Отметим, что искусственные механические характеристики пусковой диаграммы могут быть использованы и для регулирования скорости.