

2.2. Регулирование момента и тока двигателей.
При формировании заданного графика движения исполнительных органов, например кабины пассажирского лифта, возникает необходимость обеспечения требуемого ускорения и замедления. В соответствии с выражениями (2.3) и (2.4) это реализуется за счет регулирования прикладываемого к исполнительным органам со стороны ЭП момента или усилия.
![]()
В некоторых технологических процессах (прокатка металла, изготовление проводов и кабелей, бумажное и текстильное производства) требуется, чтобы на ИО рабочих машин создавалось необходимое натяжение в обрабатываемом материале или изделии, которое обеспечивается с помощью ЭП за счет регулирования создаваемого им момента или усилия.
Ограничение момента ЭП требуется также для предотвращения поломки рабочей машины или механической передачи при внезапном стопорении (прекращении) движения исполнительных органов (например, при копании грунта экскаватором, бурении скважин, заклинивании механической передачи и т.д.).
Регулирование (ограничение) тока и момента двигателей требуется также и для обеспечения нормальных условий работы самих двигателей. Так, в динамических режимах ток якоря двигателей постоянного тока обычного исполнения по соображениям нормальной работы их коллекторно-щеточного узла должен быть ограничен на уровне двух-трех раз от его номинального значения. Необходимость ограничения тока возникает и в случае пуска мощных двигателей постоянного и переменного токов, когда большие пусковые токи двигателей могут привести к недопустимому снижению напряжения питающей сети.
Каким же образом можно изменять момент двигателя? Для этого необходимо обратиться к формуле, определяющей развиваемый электрическими двигателями момент М как произведение магнитного потока Ф и тока якоря 1:
![]()
где k - конструктивный коэффициент двигателя.
В соответствии с этой формулой регулирование (ограничение) момента может быть достигнуто за счет изменения тока Iили магнитного потока Ф. На практике регулирование момента чаше всего осуществляется за счет регулирования тока. Основным показателем для оценки того или иного способа регулирования (ограничения) момента является точность поддержания заданного усилия или момента.
Регулирование тока двигателя производится его системой управления (или оператором) за счет изменения подводимого к двигателю напряжения с помощью преобразователей электроэнергии или включением в его цепи добавочных резисторов. Отметим при этом, что регулирование тока и момента может осуществляться только в динамическом (переходном) режиме ЭП, поскольку в установившемся режиме ток и момент двигателей определяются их механической нагрузкой.
Для
анализа возможности регулирования
тока используется электромеханическая
характеристика двигателя, которая
представляет собой зависимость его
скорости от тока
![]() .
Для
двигателей постоянного тока независимого
возбуждения его электромеханическая
характеристика является зависимостью
скорости от тока якоря и при постоянном
(нерегулируемом) магнитном потоке
повторяет механическую. Для асинхронного
двигателя электромеханическая
характеристика представляет собой
зависимость его скорости от тока статора
или ротора, а для синхронного двигателя
- зависимость его скорости от тока
статора.
.
Для
двигателей постоянного тока независимого
возбуждения его электромеханическая
характеристика является зависимостью
скорости от тока якоря и при постоянном
(нерегулируемом) магнитном потоке
повторяет механическую. Для асинхронного
двигателя электромеханическая
характеристика представляет собой
зависимость его скорости от тока статора
или ротора, а для синхронного двигателя
- зависимость его скорости от тока
статора.
На
рис. 3.2, а
для
примера показаны электромеханические
и механические характеристики двигателя
постоянного тока независимого
возбуждения, позволяющие регулировать
(ограничивать) ток 1
и
момент М
при
пуске с помощью добавочного резистора
![]() в цепи якоря. Резистор включается в
цепь двигателя на период пуска
(характеристика 1),
а
затем при достижении двигателем скорости
W2
закорачивается (шунтируется) с помощью
коммутационных аппаратов, и двигатель
переходит на ОСНОВНУЮ характеристику
2. Как видно из рис. 3.2, а,
регулирование
тока и момента производится ступенчато
в пределах
в цепи якоря. Резистор включается в
цепь двигателя на период пуска
(характеристика 1),
а
затем при достижении двигателем скорости
W2
закорачивается (шунтируется) с помощью
коммутационных аппаратов, и двигатель
переходит на ОСНОВНУЮ характеристику
2. Как видно из рис. 3.2, а,
регулирование
тока и момента производится ступенчато
в пределах
![]() и
характеризуется невысокой точностью.
и
характеризуется невысокой точностью.
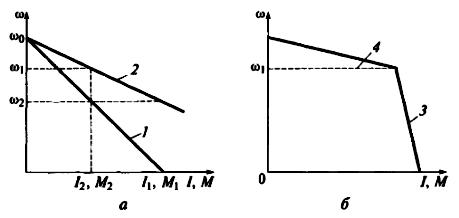
Рис. 3.2. Характеристики двигателя при ограничении тока и момента:
а - с помощью резисторов; б- в системе «преобразователь - двигатель»; 1- с резистором в цепи якоря; 2 - без резистора в цепи якоря; 3. 4 - соответственно вертикальный и горизонтальный участки характеристики в замкнутой системе.
Для повышения точности необходимо использовать несколько ступеней резисторов и несколько пусковых характеристик, в этом случае ток I и момент М будут изменяться в меньших пределах.данный способ характеризуется простотой реализации, но отличается малой точностью.
Наибольшая точность может быть получена в замкнутой системе «преобразователь - двигатель» за счет регулирования подводимого к двигателю напряжения. В таком ЭП может быть получена изображенная на рис. 3.2, б характеристика, наличие участка 3 которой обеспечивает ограничение тока и момента двигателя. В пределе участок 3 характеристики может быть получен в виде вертикальной линии, что определит максимально возможную точность регулирования тока и момента.