

1.6. Неустановившееся движение электропривода при линейной зависимости динамического момента от скорости.
Линейная зависимость динамического момента ЭП от скорости соответствует линейным механическим характеристикам, как двигателя, так и ИО РМ. такие характеристики переходного процесса характерны для электроприводов с двигателем постоянного тока независимого возбуждения (ЭП с ДПТ НВ). Такие характеристики будут иметь вид:
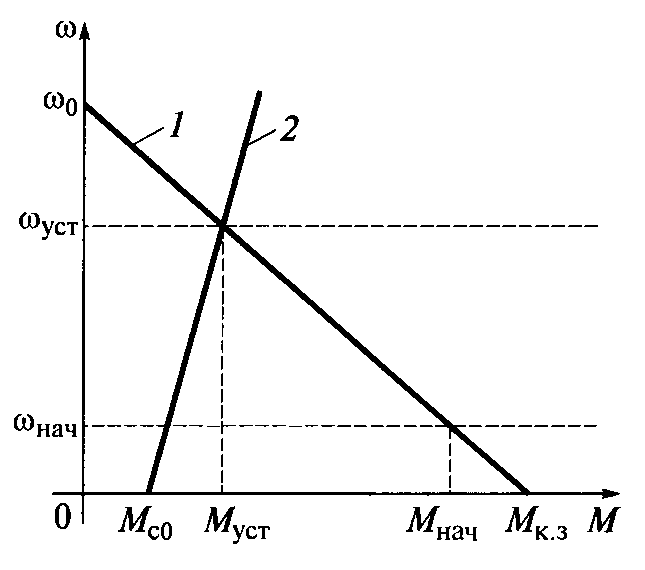
Механические характеристики, когда динамический момент изменяется линейно
Данные характеристики описываются следующими уравнениями
М=Мкз-
Мс=МС0+
Мкзи МС0 – это моменты двигателя и ИО РМ при нулевой скорости.
Подставляя данные значения моментов в уравнения движения электропривода, получим следующие уравнение:
М-МС=Мкз- * -МС0- * =J*
решение которого будет иметь вид: Тм=J/( + C)
где Тм– механическая постоянная времени
Соотношение момента инерции и жёсткости механической характеристики
уст – скорость в точке пересечения характеристик двигателя и ИО РМ и определяемая соотношением моментов к жёсткости механических характеристик:
уст=(MКЗ-МС0)/( + C)
Решение данного дифференциального уравнения будет иметь вид:
=А*е-t/Tм+ уст
где постоянный коэффициент А определяется из начальных условий:
t=0; = нач =>A= нач- уст
Окончательное выражение решения дифференциального уравнения примет вид:
(t)=( нач- уст)* е-t/Tм+ уст
Если записать момент двигателя в функции времени:
M(t)= Mкз- * (t)
и учитывая, что жёсткость определяется:
= =(Mкз-Mуст)/ нач
и подставляя жёсткость в уравнение момента:
М(t)= Mкз-((Mкз- Mуст)/ кон)* (t)
или М(t)=(Mкз-Mуст)* е-t/Tм- Mуст
то можно определить механическую постоянную времени и установившеюся скорость:
Tм= =J*
0/Mкз
=J*
0/Mкз
уст=(Mкз-MC)/
Учитывая начальные условия, при которых скорость будет изменяться от начального значения до конечного значения:
нач кон
начальные условия: t=tП.П; = уст
можно определить время переходного процесса:
tП.П=Tм*ln(( уст- кон)/( уст- нач))
2.1. Регулирование скорости движения.
Регулирование скорости движения исполнительных органов требуется для многих рабочих машин: прокатных станов, подъемно-транспортных механизмов, горнодобывающих и бумагоделательных машин, металлообрабатывающих станков и многих других. Рассмотрим, каким образом ЭП может обеспечивать регулирование скорости исполнительных органов рабочих машин.
Как следует из общей схемы ЭП, скорости двигателя вращательного движения W и исполнительного органа при его вращательном Wио или поступательном Vио движении связаны между собой соотношениями
![]()
где i, Р - соответственно передаточное отношение и радиус приведения механической передачи между электродвигателем и исполнительным органом.
Анализ выражения (3.1) показывает, что регулирование скорости движения исполнительных органов может быть достигнуто тремя способами:
-воздействием на механическую передачу;
-воздействием на двигатель;
-воздействием на то и другое одновременно.
Первый способ связан с изменением передаточного числа i или радиуса приведения р механической передачи при постоянной скорости двигателя и поэтому получил название механического способа регулирования. Для его реализации могут быть использованы коробки передач (при ступенчатом регулировании), вариаторы, электромагнитные и гидравлические муфты (для плавного регулирования). Этот способ применяется ограниченно из-за сложности автоматизации технологических процессов, малого набора регулируемых механических передач указанного типа и невысоких надежности и экономичности их работы.
Второй способ, получивший название электрического, предусматривает воздействие на двигатель при неизменных параметрах механической передачи. Этот способ нашел основное применение в современном ЭП вследствие его широких регулировочных возможностей, простоты и удобства использования в обшей схеме автоматизации технологических процессов и экономичности.
Третьий способ, комбинированный, сочетает в себе электрический и механический способы, находит применение главным образом в ЭП металлообрабатывающих станков.
Итак, регулирование скорости движения ИО рабочих машин в большинстве случаев достигается за счет целенаправленного воздействия на электродвигатель, осуществляемого с помощью его системы управления.
При этом необходимо отметить: регулирование скорости может быть осуществлено за счет получения соответствующих искусственных (регулировочных) механических характеристик двигателя. Заметим также, что изменение скорости двигателя вследствие изменения нагрузки на его валу не является регулированием скорости.
Для примера на рис. 3.1 показаны естественная механическая характеристика 1 двигателя постоянного тока независимого возбуждения и три искусственные (регулировочные): при введении в цепь якоря добавочного резистора Rд (прямая 2), уменьшении подаваемого на якорь напряжения U(прямая З) и снижении магнитного потока Ф (прямая 4). Искусственные характеристики 2 и 3 обеспечивают при моменте нагрузки Мcснижение скорости до уровня (Wи2. а характеристика 4 - увеличение скорости до уровня Wи1 при постоянном моменте нагрузки Мc .
Для количественной оценки и сопоставления различных способов регулирования скорости используются следующие показатели.
-Диапазон
регулирования
скорости. Этот показатель определяется
отношением максимальной скорости
![]() к минимальной
к минимальной
![]() при заданном изменении момента нагрузки
Мс
при заданном изменении момента нагрузки
Мс![]()
-Стабильность скорости. Этот показатель характеризует изменение скорости при возможных колебаниях момента нагрузки на валу двигателя и определяется жесткостью механических характеристик двигателя. Чем она больше, тем стабильнее скорость при изменениях момента нагрузки, и наоборот. В рассматриваемом примере наибольшую стабильность скорости обеспечивает искусственная характеристика З.
-Плавность
регулирования скорости.
Этот показатель определяется перепадом
скорости при переходе с одной
искусственной характеристики
двигателя на другую. Чем больше в
заданном диапазоне регулирования
скорости может быть получено искусственных
характеристик, тем плавнее будет
происходить регулирование скорости.
Наибольшая плавность обеспечивается
при использовании для регулирования
координат силовых преобразователей
электроэнергии. Плавность регулирования
может быть оценена коэффициентом
плавности![]() определяемым отношением скоростей
определяемым отношением скоростей
![]() на двух ближайших характеристиках:
на двух ближайших характеристиках:
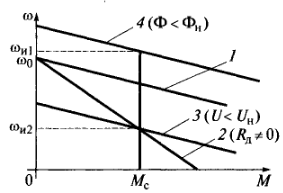
Рис. 3.1. Механические характеристики двигателя постоянного тока
независимого возбуждения:
1 - естественная; 2 - при включении резистора в цепь якоря; 3 - при снижении напряжения; 4 - при ослаблении магнитного потока.
-Направление регулирования скорости. В зависимости от способа воздействия на двигатель и, следовательно, вида получаемых искусственных характеристик его скорость может увеличиваться или уменьшаться по сравнению с работой на естественной характеристике при данном моменте нагрузки. В первом случае говорят о регулировании скорости вверх от основной, во втором случае - о регулировании скорости вниз. Можно сказать, что регулирование скорости вверх связано с получением искусственных механических характеристик, располагающихся выше естественной (характеристика 4 на рис. 3.1), а регулирование скорости вниз обеспечивается характеристиками, располагающимися ниже естественной (характеристики 2 и 3 на рис. 3. 1).
-Допустимая нагрузка двигателя.Электрический двигатель спроектирован таким образом, что, работая на естественной характеристике с номинальными скоростью, током, моментом и мощностью, он не нагревается выше определенной температуры, на которую рассчитана его изоляция. В этом случае срок ею службы будет нормативным и составляет обычно 15-20 лет. Поскольку нагрев двигателя определяется потерями мощности в нем, пропорциональными квадрату тока, его нормативный (допустимый) нагрев будет иметь место при протекании номинального тока.
При регулировании скорости двигатель работает уже на искусственных характеристиках при отличных от паспортных условиях. Для сохранения нормативного нагрева двигателя и тем самым расчетного срока его службы нагрузка двигателя может быть только такой, при которой в двигателе протекает ток не выше номинального. Именно такая нагрузка и называется допустимой. Другими словами, критерием допустимой нагрузки является номинальный ток двигателя.
Все способы регулирования скорости подразделяются по этому признаку на две группы: одна характеризуется допустимой нагрузкой, равной номинальному моменту; другая - нагрузкой, равной номинальной мощности двигателя. При правильном выборе способа регулирования скорости двигатель полностью используется по своим возможностям во всем диапазоне ее изменения.
Важно отметить, что при оценке допустимой нагрузки должны быть учтены условия охлаждения двигателей. В частности, если при снижении скорости двигателя ухудшаются условия его охлаждения (двигатели с самовентиляцией), то по соображениям допустимой нагрузки двигатель должен работать с током, меньше номинального.
-Экономичность регулирования скорости. Одни и те же показатели регулирования скорости - диапазон, стабильность, плавность - могут быть обеспечены различными ЭП и способами регулирования их скорости. Для выбора наиболее рационального вида регулируемого ЭП используются различные технико-экономические показатели: капитальные затраты на реализацию, эксплуатационные расходы, срок окупаемости, надежность, удобство и простота эксплуатации, серийность и унификация средств управления и т.д. В результате анализа всех возможных вариантов выявляется экономически обоснованное решение.
Обычно сопоставление вариантов регулируемого ЭП производится по капитальным затратам и эксплуатационным расходам с учетом срока окупаемости. Если капитальные затраты на реализацию ЭП окупаются за счет сокращения расходов при его эксплуатации за заданный срок окупаемости, то такое техническое решение считается экономически обоснованным. Могут использоваться и другие технико-экономические показатели.
Сопоставление и экономическая оценка различных способов регулирования скорости ЭП правомочны только в том случае, когда все они обеспечивают в равной степени заданные технологические процессы рабочей машины.