

1.5. Неустановившееся движение электропривода при постоянном динамическом моменте.
Неустановившееся
движение возникает, когда не сохраняется
равенство моментов: М Мс.
Мс.
При этом динамический момент не будет равен нулю: Мдин=М-Мс 0, и происходит либо увеличение, либо уменьшение скорости ЭП.
Неустановившееся движение имеет место при пуске, торможении, реверсе двигателя, регулировании его скорости и при изменении нагрузки на валу двигателя. Таким образом, неустановившееся движение возникает при переходе ЭП из установившегося движения с одними параметрами к установившемуся движению с другими параметрами называется переходным процессом или переходным режимом ЭП.
Цель рассмотрения неустановившегося движения – это получение зависимостей следующих механических переменных ЭП.
1) Момента; 2) Скорости; 3) Угла поворота вала двигателя от времени
М=f(t)
ω=f(t)
 =f(t)
=f(t)
Данные зависимости получаются при решении дифференциального уравнения движения ЭП:
М
МС=J* =
=
Для решения данных уравнений необходимо знать законы изменения моментов двигателя и нагрузки, массы и моменты инерции движущихся элементов и начальные условия.
В общем случае моменты двигателя и нагрузки могут являться функциями времени и координат движения.
Рассмотрим наиболее простой случай, когда момент нагрузки и момент двигателя являются постоянными М=const, МC=const, а масса и момент инерции в переходных процессах не изменяются.
Для этого случая приведены следующие механические характеристики
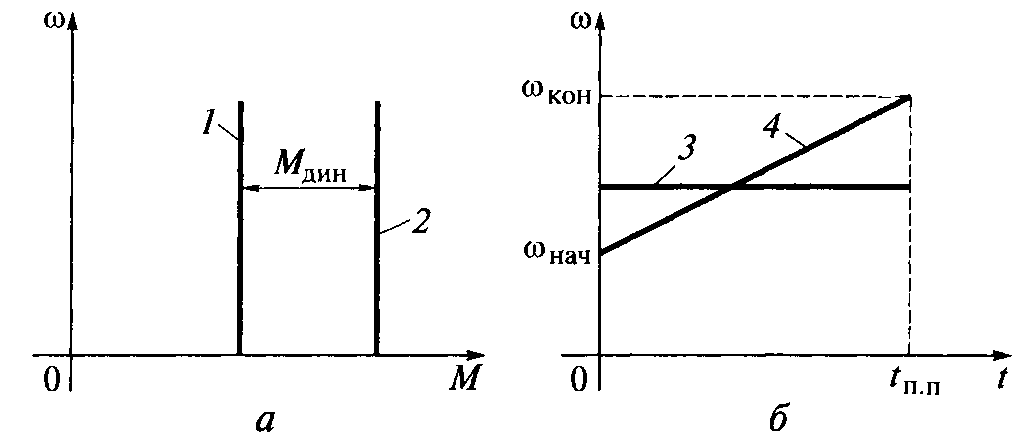
Механические характеристик а) и графики переходного процесса б) при постоянном динамическом моменте.
1) механическая характеристика ИО РМ;
2) механическая характеристика двигателя;
3) график момента;
4) график скорости.
Общий случай, показанный на графике, когда момент двигателя и момент нагрузки являются постоянными, а масса и момент инерции не изменяются во времени. Уравнение движения ЭП решается методом разделения переменных, после чего его решение примет вид:
 =(M-MC)*t/J+C
=(M-MC)*t/J+C
Постоянная интегрирования «С» находится из начальных условий t=0; ω=ωнач; и будет равна:С= ωнач
Таким образом, уравнение движения электропривода при данных условиях примет вид:
=((M-MC))/J))+ нач
В общем случае, когда время переходного процесса t 0, уравнение переходного процесса будет иметь вид:
t 0 => =((M-MC))*t/J))+ нач
Данное уравнение показывает, что при данных условиях скорость будет линейно зависеть от времени.
При этом, если разность моментов имеет знак «+» (М-Мс)>0, то скорость будет увеличиваться (график 4).
Если момент нагрузки больше чем момент двигателя, то скорость будет изменяться по характеристике 3, либо уменьшаться (М-Мс)<0.
Из уравнения решения движения ЭП можно определить время переходного процесса, за которое скорость будет изменяться от своего начального значения до конечного:
нач кон
кон
tП.П=J*( кон- нач)/(М-МС)
Угол поворота двигателя от времени переходного процесса определяется выражением:
=(М-МС)*t2/(2*J)+ нач*t+ нач
Таким образом, угол поворота вала двигателя будет иметь квадратичную зависимость от времени переходного процесса.