

1.4. Установившееся движение электропривода и его устойчивость.
Для одномассовой системы установившееся движение ЭП будет определяться равенством моментов:
 М
М МС=J*
МС=J* M=MC
M=MC
Поверка выполнения этого условия может производится аналитическим методом или с помощью механических характеристик двигателя и ИО РМ.
Механической характеристикой называется зависимость его скорости от развиваемого момента (при вращательном движении) или зависимость его скорости от усилия (при поступательном движении).
Естественной характеристикой называется характеристика которая соответствует основной схеме включения и номинальным или паспортным данным(если нет дополнительных сопротивлений).
Искусственная характеристика – это характеристика которая получается при изменении каких-либо номинальных параметров двигателя (изменение напряжения, тока, сопротивления).
Механическая характеристика ИО РМ – это зависимость скорости от возникающего при его движении усилия или момента.
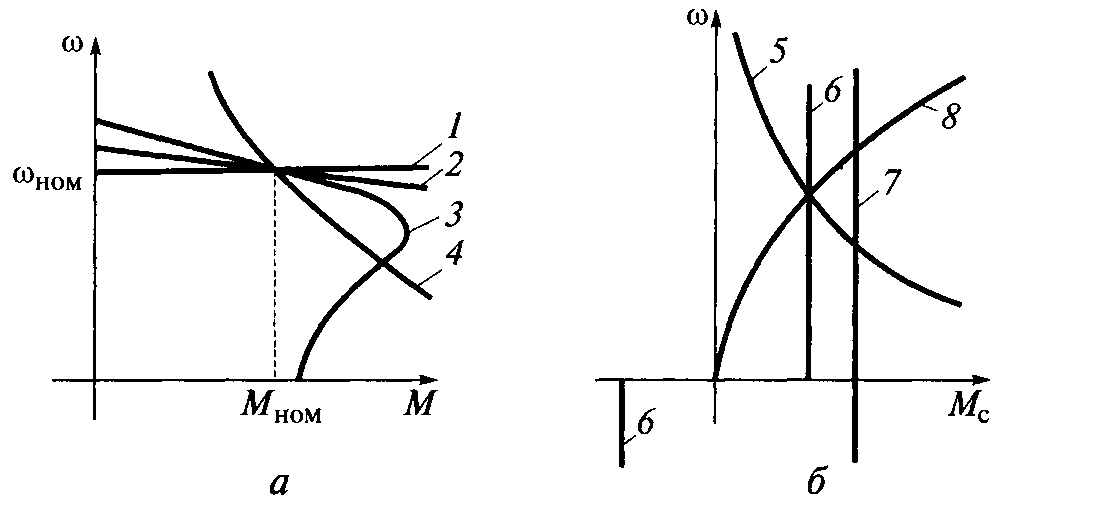
а) двигателей
1) синхронного; 2) постоянного тока с независимым возбуждением; 3) асинхронного; 4) постоянного тока с последовательным возбуждением.
б) ИО РМ
5) механизма главного движения металлообрабатывающего станка; 6) транспортёра; 7) подъёмного механизма; 8) центробежных насосов.вентиляторов и компрессоров.
По характеру действия моменты нагрузки бывают активные и реактивные.
Активный момент имеет постоянное независящее от скорости направление своего действия. Также момент создаётся потенциальными силами, к которым относятся такие силы как сила притяжения земли, сила упругих деформаций.
Реактивный момент создаётся силами трения или силами, которые противодействуют движению и поэтому его знак изменён в соответствии с направлением движения.
Количество механических характеристик двигателя и ИО РМ определяется жёсткостью механических характеристик:
 =
= =
=
Таким образом жёсткость, синхронного двигателя будет иметь значение бесконечности, а характеристика будет абсолютно жёсткой:
CD:
=
Характеристика асинхронного двигателя (АД) будет иметь и положительные и отрицательные значения, поэтому жёсткость равна нулю. А характеристика будет иметь мягкий характер:
AD: =0
У двигателя постоянного тока жёсткость характеристики зависит от способа возбуждения двигателя.
Для определения установившегося движения двигателя на одной и той же плоскости координат строят механическую характеристику двигателя и характеристику ИО РМ.

Точки пересечения 1 и 2 двигателя и ИО РМ будут соответствовать установившемуся движению ЭП со скоростями ωуст1, ωуст2 и моментом Муст=Мс.
Аналитический способ определения установившегося движения применяется в тех случаях, когда механические характеристик двигателя и ИО РМ заданы в виде уравнений. Эти уравнения совместно решаются при условии равенства моментов М=Мс и получается искомая установившееся скорость ωуст. Подстановка установившейся скорости в любое из уравнений механической скорости позволяет получить значение установившегося момента. Таким образом, видом механических характеристик двигателя и ИО РМ определяется устойчивость установившегося движения ЭП.
Под устойчивостью понимается свойство системы двигатель – ИО РМ, поддерживать движение с установившейся скоростью при возможных небольших отклонениях от неё.
Проверка
на устойчивость движения может быть
выполнена с помощью жесткостей
механических характеристик. Если
выполняется условие
 c,
то движение устойчивое.
c,
то движение устойчивое.
c– жёсткость ИО РМ; – жёсткость двигателя