5.3. Пуск и торможение синхронных двигателей
Пуск синхронныхдвигатетей. Он имеет ряд особенностей, отличающих его от других типов двигателей. Первая особенность связана с тем, что при неподвижном роторе и подключении обмоток статора и возбуждения к источникам питания двигатель будет развивать не постоянный по направлению, а в соответствии с формулой (6.1) знакопеременный вращающий момент из-за постоянно изменяющихся взаимных направлений магнитных полей статора и ротора.
Один
из вариантов пуска связан с использованием
небольшого по мощности вспомогательного
двигателя, устанавливаемого на валу
синхронного двигателя. С его помощью
ненагруженный синхронный двигатель
разгоняется до синхронной скорости,
после чего осуществляется синхронизация
с сетью. В агрегатах «синхронный
двигатель—генератор постоянного тока»
в качестве такого вспомогательного
двигателя может быть использован сам
генератор, работающий в период пуска
в двигательном режиме.
В настоящее время для пуска синхронных двигателей применяются асинхронный и частотно-управляемый способы пуска.
Для реализации асинхронного пуска на роторе двигателя укладывается дополнительная пусковая обмотка, выполняемая аналогично короткозамкнутой обмотке асинхронного двигателя типа беличьей клетки. В этом случае при подключении двигателя к сети переменного тока происходит его разбег аналогично асинхронному двигателю до подсинхронной скорости, после чего он втягивается в синхронизм с сетью.
В зависимости от своих параметров пусковая обмотка двигателя обеспечивает две основные разновидности механической пусковой характеристики (рис. 6.4). Характеристика 1 обеспечивает более высокий синхронизирующий (входной) момент МB1по сравнению с характеристикой 2, но меньший начальный (пусковой) момент Мп1< Мп2, и наоборот. Выбор вида пусковой характеристики двигателя определяется конкретными условиями его работы и видом производственного механизма.
В схеме вентильного двигателя реализуется частотный способ пуска двигателя. При этом способе с помощью специального задатчика скорости осуществляется плавное увеличение частоты питающего двигатель напряжения и тем самым скорости вращения его магнитного поля. При этом ротор «успевает» за магнитным полем и двигатель работает синхронно с источником питания уже с самых малых своих скоростей. Такой способ пуска характеризуется к тому же и пониженными потерями энергии в двигателе.
Вторая особенность пуска двигателя связана с моментом подачи тока в обмотку его возбуждения. При пуске двигателя используются два основных способа его возбуждения: с возбуждением перед синхронизацией двигателя и при постоянно (глухо) подключенном источнике питания цепи возбуждения.
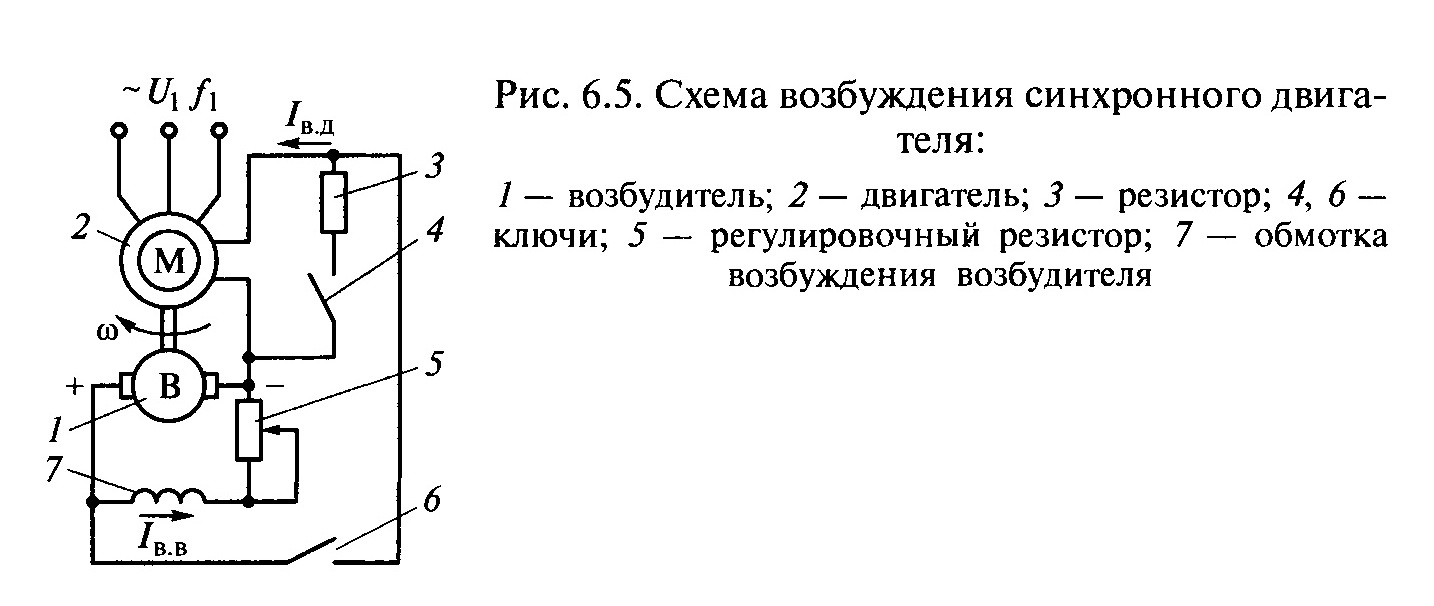
При использовании первого варианта, который реализуется по схеме на рис. 6.5, на первом этапе пуска ключ б разомкнут, а ключ 4 замкнут. Обмотка возбуждения двигателя 2 оказывается замкнутой на резистор 3, и асинхронный пуск происходит в благоприятных условиях.
В конце пуска при достижении подсинхронной скорости по команде специального реле управления, в качестве которого могут быть использованы реле частоты, тока или времени, ключ 4 размыкается, а ключ б замыкается. В результате в обмотку возбуждения подается ток от возбудителя 1 и двигатель 2 втягивается в синхронизм. Регулирование тока возбуждения осуществляется резистором 5 в цепи обмотки 7 возбуждения возбудителя.
Второй
вариант возбуждения двигателя
соответствует схеме на рис. 6.1, а,
являющейся более простой и получившей
название схемы с постоянно (глухо)
подключенным возбудителем. В этой схеме
обмотка возбуждения с самого начала
пуска постоянно подключена к
возбудителю В. При скорости
 происходит
самовозбуждение возбудителя 1и в обмотку
возбуждения двигателя подается ток
возбуждения, благодаря чему при
достижении подсинхронной скорости
двигатель втягивается в синхронизм.
происходит
самовозбуждение возбудителя 1и в обмотку
возбуждения двигателя подается ток
возбуждения, благодаря чему при
достижении подсинхронной скорости
двигатель втягивается в синхронизм.
Пуск по схеме рис. 6.1, а происходит в менее благоприятных условиях, так как пусковой момент СД оказывается ниже, чем в случае применения схемы рис. 6.5, что затрудняет его синхронизацию. Поэтому схема на рис. 6.1, а применяется при относительно легких условиях пуска двигателя, когда момент нагрузки на его валу не превосходит 40...50 % его номинального момента, а инерционные массы ЭП и исполнительного органа невелики. При более трудных условиях пуска применяется схема рис. 6.5.
Третья особенность пуска определяется необходимостью ограничения пускового тока мощных двигателей при их асинхронном пуске. В случае соизмеримых мощностей двигателя и питающей сети значительные пусковые токи приводят к заметному падению напряжения в питающей сети, что неблагоприятно сказывается на работе других потребителей электроэнергии.
Ограничение пусковых токов может обеспечиваться включением на время пуска в цепь статора добавочных резисторов или реакторов или же снижением на время пуска подводимого к двигателю напряжения с помощью автотрансформаторов или тиристорных пусковых устройств.
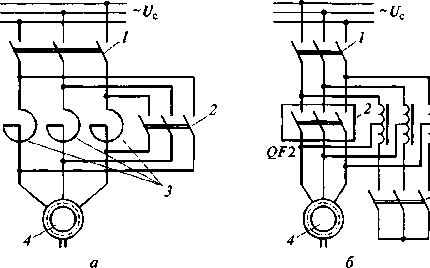
При реакторном пуске двигателей (рис. 6.6, а) замыкают выключатель 1 при отключенном выключателе 2 и осуществляют пуск двигателя 4 с реактором 3 в цепи статора, обеспечивающего снижение пускового тока до допустимого уровня. При достижении двигателем подсинхронной скорости замыкают выключатель 2, который шунтирует реактор 3, и двигатель оказывается подключенным на полное напряжение сети. Автоматизация пуска осуществляется обычно в функции времени. В некоторых схемах вместо реактора 2 применяются более дешевые активные резисторы.
В случае использования автотрансформатора 5 (рис. 6.6, б) при пуске замыкаются выключатели 1 и 6 и к двигателю подводится пониженное напряжение. При достижении им подсинхронной скорости отключается выключатель 6, замыкается выключатель 2 и двигатель подключается непосредственно в сеть.
Сопоставление рассмотренных схем показывает, что при использовании автотрансформатора пусковой ток снижается пропорционально квадрату отношения напряжений двигателя и сети (Uд/Uc)2, а при использовании реакторов или резисторов — первой степени этого отношения. Однако автотрансформаторный способ пуска является более сложным, дорогим и менее надежным по сравнению с реакторным (резисторным) и применяется реже.
Для ограничения пусковых токов двигателей, в том числе и высоковольтных, все большее распространение находят тиристорные регуляторы напряжения в качестве «мягких» пускателей или стартеров, обладающие более широкими функциональными возможностями по управлению двигателями и меньшей стоимостью.
Рис. 6.6. Схемы при ограничении пускового тока с использованием реакторов (а) и автотрансформатора (б): 1 — автоматический выключатель; 2, 6 — выключатели; 3 — реактор; 4 — двигатель; J — автотрансформатор
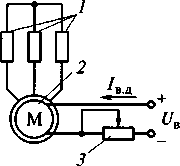
Торможение синхронных двигателей. Как и у других электродвигателей, оно осуществляется переводом их в генераторный режим, в котором они развивают на своем валу тормозной момент. Наиболее часто при этом используется схема динамического торможения (рис. 6.7), которая соответствует генераторному режиму двигателя при его работе независимо от сети переменного тока.
В этой схеме обмотки статора двигателя 2 отключаются от сети переменного тока и закорачиваются на добавочные резисторы 1 (или накоротко), а обмотка возбуждения остается подключенной к источнику возбуждения UB через регулировочный резистор 3. Двигатель при этом будет иметь механические характеристики, аналогичные характеристикам асинхронного двигателя, представленным на рис. 5.26, б.
Торможение противовключением используется очень редко, так как перевод двигателя в этот режим сопровождается значительными бросками тока и момента, требует токоограничения и применения сложных схем управления.
Рис. 6.7. Схема динамического торможения синхронного двигателя: 1— резисторы в цепи ротора;
2 — двигатель; 3 — регулировочный резистор