

6.8. Вентильно-индукторный электропривод
Для ряда рабочих машин и производственных механизмов применение находит так называемый вентильно-индукторный привод (ВИП). Основными достоинствами такого ЭП являются простота, технологичность, и дешевизна применяемого в таком ЭП индукторного электродвигателя, которые сочетаются в то же время с хорошими регулировочными возможностями ЭП. Мощности таких ЭП могут лежать в пределах от единиц до нескольких сотен киловатт и более.
Структурная схема силовой части ВИП в случае питания его от трехфазной сети переменного тока представлена на рис. 6.16. а.
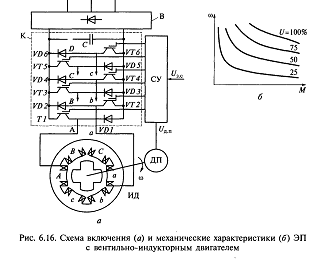
В ее состав входит индукторный двигатель ИД, электронный коммутатор К с выпрямителем В, датчик положения ДП ротора двигателя и система управления СУ ВИП. Особенность ВИП состоит в применении индукторного двигателя с неодинаковым количеством полюсов статора и зубцов ротора, лежащими обычно в пределах 4... 12.На рис. 6.16 в качестве примера показан трехфазный двигатель, имеющий шесть полюсов статора и четыре зубца на роторе.
На полюсах статора ИД расположены обмотки А—а, В—b, С—с, подключенные к электронному коммутатору, выполняемому обычно на силовых транзисторах того или иного типа. В схеме на рис. 6.16, а в качестве управляемых ключей коммутатора используются силовые биполярные транзисторы VT1…VT6изолированным затвором типа IGBT. Управление ключами осуществляет схема управления СУ, обеспечивающая подачу на них импульсов управления с необходимыми последовательностью и частотой, которые определяются сигналами задания скорости UЗСи датчика положения UДП.
Принцип действия ВИП состоит в следующем. При подаче импульсов управления из пару транзисторов (ключей) одной фазы коммутатор подключает обмотку этой фазы двигателя к выходу выпрямителя В. По обмотке начинает протекать ток.создающий в двигателемагнитное поле. Это магнитное поле вызовет появление электромагнитных сил притяжения между полюсами статора и ближайшими к ним зубцами ротора, которые создадут вращающий момент на валу двигателя. Под его действием ротор переместится в согласованное положение, в котором оси возбужденных полюсов статора и ближайших к ним зубцов ротора будут совпадать.
Так как число полюсов статора и зубцов ротора различно, то в согласованном положении ротора для работающей фазы следующая фаза оказывается в рассогласованном положении и подготовлена к очередному подключению к источнику питания. Требуемая последовательность подключения фаз двигателя к источнику штанин, при которой на его валу обеспечивается постоянное направление вращающего момента, осуществляется с помощью находящегося на валу датчика положения.
Скорость вращения ротора определяется следующей формулой:
 (6.7)
(6.7)
 —
частота
коммутации обмоток; m—
число фаз двигателя; n—
число зубцов ротора.
—
частота
коммутации обмоток; m—
число фаз двигателя; n—
число зубцов ротора.
Формула (6.7) показывает возможности выполнения ВИП на hазличные скорости. При высокой частоте коммутации обмоток могут быть реализованы двигатели на большие скорости вращения, а выполнение их с большим числом полюсов статора и зубцов ротора позволяет получить низкие скорости ВИП. При низких скоростях двигателя из кинематической схемы ВИП могут быть .исключены редукторы.
Механические характеристики двигателя в разомкнутой структуре ВИП при различных напряжениях питания Uпоказаны на рис. 6.16. 6. При помощи различных обратных связей могут быть сформированы характеристики, обеспечивающие регулирование координат ЭП с требуемым качеством. В ВИП может быть реализовани тормозной режим работы, осуществляемый за счет выборамоментов включения и отключения обмоток двигателя.
Показанные на схеме рис. 6.16., а диоды VD1... VD6 служит для обеспечения возможности циркуляции электромагнитной мощности в ЭП при отключении силовых транзисторов, а конденсатор С играет роль фильтра на выходе выпрямителя.
В современных схемах ВИП широко используются микропроцессорные средства управления. При их использовании в ряде случаев оказывается возможным отказаться от применения в ЭП датчика положения, а необходимую для работы ЭП информацию о положении ротора получить косвенным путем. Это позволяет упростить кинематическую схему ВИП и сделать его более простым и надежным.