

4.1. Регулирование переменных электропривода с ад с помощью резисторов.
Данный способ регулирования переменных, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи двигателя.
Включение
добавочных резисторов R1Дв цепь статора.
Этот способ применяется главным
образом для регулирования (ограничения)
в переходных процессах тока и момента
двигателя с короткозамкнутым ротором.
Как следует из формулы
![]() (5.3), включение резистора в цепь статора
ведет при данной скорости (скольжении)
к снижению токов статора и ротора.
Другими словами, все искусственные
электромеханические характеристики
располагаются в первом квадранте
ниже и левее естественной. С учетом
того, что скорость идеального холостого
хода
(5.3), включение резистора в цепь статора
ведет при данной скорости (скольжении)
к снижению токов статора и ротора.
Другими словами, все искусственные
электромеханические характеристики
располагаются в первом квадранте
ниже и левее естественной. С учетом
того, что скорость идеального холостого
хода
![]() при
включении R1Дне изменяется, получаемые
искусственные электромеханические
характеристики можно представить
семейством кривых на рис. 5.6, а,
для
которых
при
включении R1Дне изменяется, получаемые
искусственные электромеханические
характеристики можно представить
семейством кривых на рис. 5.6, а,
для
которых
![]() .
Получаемые характеристики позволяют
ограничивать ток двигателя при пуске
и других переходных процессах.
.
Получаемые характеристики позволяют
ограничивать ток двигателя при пуске
и других переходных процессах.
Для получения искусственных механических характеристик проанализируем влияние R1Дна координаты их характерных точек.
Скорость холостого хода не изменяется при R1Д =var, т.е. все искусственные характеристики проходят через эту точку на оси скорости (скольжения).
Координаты
точки экстремума
![]() изменяются
при варьировании R1Д , а именно: в
соответствии с (5.9) и (5.10) при увеличении
R1Дкритический момент Мки
критическое скольжение Sк
уменьшаются.
Уменьшается и пусковой момент, который
определяется формулой
изменяются
при варьировании R1Д , а именно: в
соответствии с (5.9) и (5.10) при увеличении
R1Дкритический момент Мки
критическое скольжение Sк
уменьшаются.
Уменьшается и пусковой момент, который
определяется формулой
![]() (5.8) при s =
1.
Проведенный анализ позволяет представить
искусственные механические характеристики
двигателя при R1Д
=var
в виде, показанном на рис. 5.6, б.
Такие
характеристики позволяют при
необходимости снижать в переходных
процессах момент двигателя, в том числе
и пусковой.
(5.8) при s =
1.
Проведенный анализ позволяет представить
искусственные механические характеристики
двигателя при R1Д
=var
в виде, показанном на рис. 5.6, б.
Такие
характеристики позволяют при
необходимости снижать в переходных
процессах момент двигателя, в том числе
и пусковой.
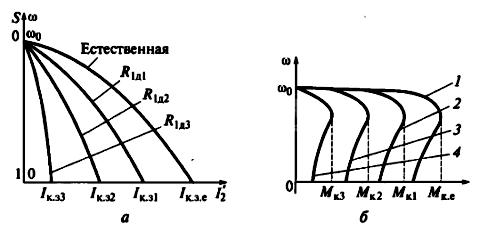
Рис. 5.6. Электромеханические (а) и механические (б) характеристики двигателя при включении добавочного резистора в цепь статора
Включение добавочных резисторов R2Д в цепь ротора.
Этот способ применяется как в целях регулирования в переходных процессах тока и момента двигателя с фазным ротором, так и его скорости.
Искусственные электромеханические характеристики при R2Д=var имеют вид, показанный на рис. 5.6, а для случая R1д = vаг, и могут использоваться для регулирования (ограничения) пускового тока.
Для
построения получаемых при этом способе
искусственных механических характеристик
проведем анализ влияния R2Д на координаты
их характерных точек. Скорость идеального
холостого хода двигателя и максимальный
(критический) момент двигателя в
соответствии с
![]() (5.9) остаются неизменными при регулировании
R2д, а критическое скольжение, как это
следует из
(5.9) остаются неизменными при регулировании
R2д, а критическое скольжение, как это
следует из
![]() (5.10), изменяется пропорционально
сопротивлению этого резистора.
(5.10), изменяется пропорционально
сопротивлению этого резистора.
Выполненный анализ позволяет построить естественную (R2д = О) и искусственные 1 и 2 при R2д2 > R2д1 характеристики, приведенные на рис. 5.8. Из этих характеристик видно, что за счет изменения R2д имеется возможность повышать пусковой момент двигателя вплоть до критического момента Mк (характеристика 2), что позволяет сохранить перегрузочную способность двигателя при регулировании его скорости.
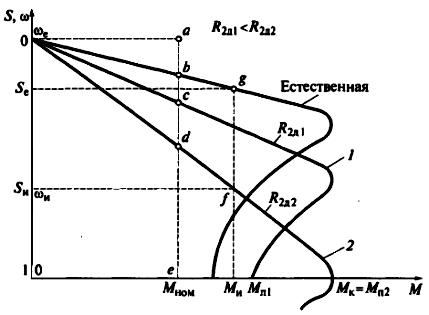
Рис. 5.8. Механические характеристики асинхронного двигателя при включении дополнительных резисторов в цепь ротора:
1 - реостатная при R2д1; 2 - реостатная при R2д2.
Диапазон регулирования скорости равен примерно 2 ... 3 из-за снижения жесткости характеристик и роста потерь мощности по мере его увеличения. Плавность регулирования скорости, которая в двигательном режиме может только снижаться, определяется плавностью изменения добавочного резистора R2д.
Регулирование скорости этим способом целесообразно осуществлять при небольшом диапазоне или кратковременной работе на пониженных скоростях. Например, этот способ нашел широкое применение в ЭП подъемно-транспортных машин и механизмов.
Типовой задачей для ЭП с асинхронным двигателем с фазным ротором является расчет резисторов в цепи ротора, обеспечивающих заданную пусковую диаграмму двигателя. Напомним, что пусковая диаграмма представляет собой совокупность нескольких искусственных механических характеристик двигателя, которые используются при его пуске.
Пусковая диаграмма асинхронного двигателя обычно строится по аналогии с двигателем постоянного тока независимого возбуждения предполагая, что рабочий участок механических характеристик асинхронного двигателя близок к линейному. При построении пусковой диаграммы двигателя максимальный момент М1 обычно принимается не более 0,8 ... 0,9 Мк, а момент М2 должен составлять 1,1 ... 1,2 Мс. Число характеристик (ступеней) пусковой диаграммы m и значения моментов М1 и М2 связаны между собой следующим соотношением:
![]()